基于SolidWorks的钢筋对焊夹具三维建模及运动仿真
2016-03-18ThreedimensionalmodelingandmotionsimulationofweldedsteelfixturebasedonSolidworks
Three-dimensional modeling and motion simulation of welded steel fixture based on Solidworks
贺甲甲1,2,袁忠杰2,朱先琦1
HE Jia-jia1,2, YUAN Zhong-jie2, ZHU Xian-qi1
(1.安徽工程大学 机械与汽车工程学院,芜湖 241000;2.安徽易特流焊割发展有限公司,合肥 230001)
基于SolidWorks的钢筋对焊夹具三维建模及运动仿真
Three-dimensional modeling and motion simulation of welded steel fixture based on Solidworks
贺甲甲1,2,袁忠杰2,朱先琦1
HE Jia-jia1,2, YUAN Zhong-jie2, ZHU Xian-qi1
(1.安徽工程大学 机械与汽车工程学院,芜湖 241000;2.安徽易特流焊割发展有限公司,合肥 230001)
摘 要:钢筋电渣压力焊是一种高效的竖向钢筋连接技术,完成这种焊接的主要工具之一是钢筋对焊夹具。应用SolidWorks软件对钢筋对焊夹具的主要零部件进行设计和三维建模,完成了钢筋对焊夹具三维模型的装配,并对装配体进行了分析和检查,最后应用SolidWorks Motion插件对钢筋对焊夹具的运动过程进行了动画仿真。
关键词:钢筋连接;对焊夹具;装配;仿真
0 引言
竖向钢筋电渣压力焊技术广泛应用于建筑施工行业中,代替了原来经常使用的搭接捆绑和手工埋弧焊的方法[1]。这是一种综合性的焊接工艺,同时具有埋弧焊、电渣焊、压力焊等焊接工艺的特点。其焊接方法是,将两根钢筋安放在竖向对接形式,利用焊接电流通过钢筋端面间隙,在焊剂层下形成电弧过程和电渣过程,产生电弧热和电阻热,熔化钢筋端部,加压完成连接的一种焊接方法[2]。
在建筑施工中,钢筋对焊连接质量的好坏对施工的质量和安全具有重大影响。影响钢筋对焊连接质量的一个重要因素就是钢筋对焊夹具。钢筋安装应上下同心同肋对齐,夹具应紧固,严防晃动。一个合格的钢筋对焊夹具不仅要满足钢筋对焊的焊接质量,同时也要能提高操作者的劳动效率,降低劳动强度。本文旨在利用SolidWorks2013软件,完成满足上述要求的钢筋对焊夹具的三维建模,并为钢筋对焊夹具的设计提供参考。
1 钢筋对焊夹具主要零部件设计及建模
组成钢筋对焊夹具的主要零部件有:夹具座、一对互相啮合的锥齿轮、夹具丝杆、丝杆螺母、夹钳、夹钳手柄和夹具提手等。
1.1 夹具座的钣金设计与建模
夹具座是钢筋对焊夹具的承载主体,主要用于安装钢筋对焊夹具的主要零部件。应用SolidWorks中的钣金设计模块对夹具座进行钣金设计。本文应用钣金特征直接创建夹具座的钣金件,即首先在绘图平面上直接创建一个基本法兰特征,然后以此法兰为基础创建其他法兰特征和切除材料孔特征。夹具座三维模型如图1所示。

图1 夹具座
其中长圆孔的作用是作为轨道供丝杠螺母滑动,从而在焊接前带动上钢筋的运动实现与下钢筋的对接。其他圆柱螺纹孔的作用是固定夹具提手、夹具夹钳。
1.2 锥齿轮的设计与建模
齿轮传动在机械传动中广泛应用。齿轮传动有多种形式,本文采用锥齿轮传动来实现上钢筋的运动。基于SolidWorks软件中的toolbox插件,以及SolidWorks建模的常用命令对直齿锥齿轮进行了建模。生成的锥齿轮的三维模型如图2所示。
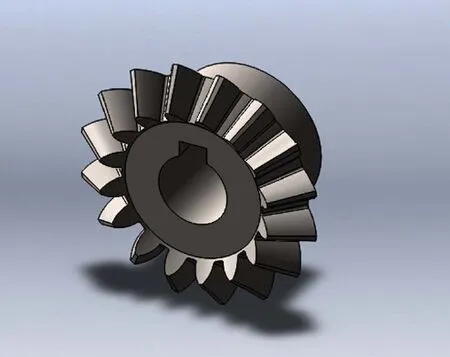
图2 锥齿轮
1.3 夹具丝杆的设计与建模
本文设计的夹具丝杆的主要作用是连接锥齿轮和丝杆螺母。螺纹孔用于连接锥齿轮,螺纹用于旋合丝杆螺母。当摇动手柄带动伞齿轮传动的时候,与之连接的丝杆会转动,从而带动丝杆螺母的滑动,因夹钳固定夹是与夹具丝杆连接的,从而也就带动了夹钳固定夹的滑动,最终带动钢筋的上下移动,从而实现上下两根钢筋的对接与焊接。丝杆的三维模型如图3所示。
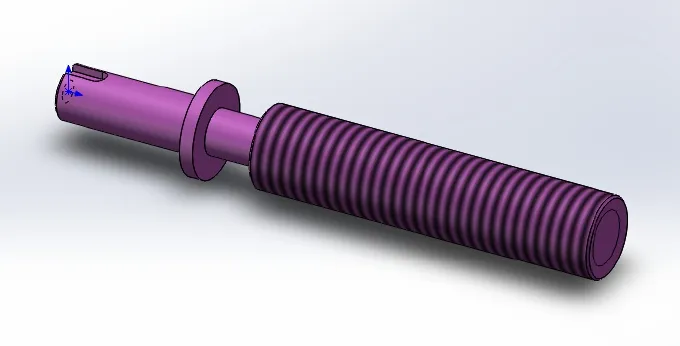
图3 夹具丝杆
1.4 丝杆螺母的设计及建模
如1.3节所言,丝杆螺母主要用来连接夹具丝杆和固定夹钳,中间的螺纹孔是用来连接夹具丝杆的,凸台上的四个螺纹孔主要是用来固定夹钳固定夹和连接夹钳活动夹的。螺母三维模型如图4所示。
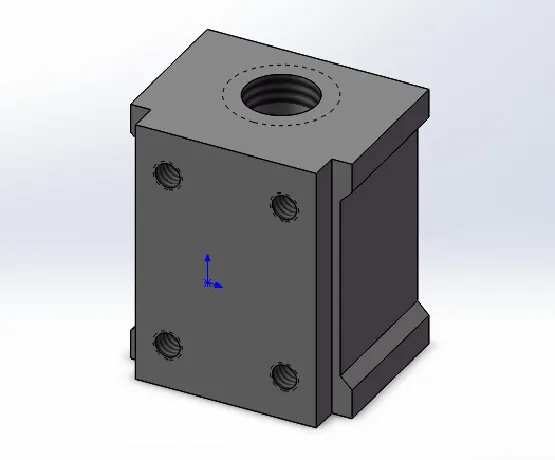
图4 丝杆螺母
1.5 夹钳固定夹和活动夹的设计与建模
顾名思义,夹钳固定夹是固定不动的,其通过夹钳垫板隔着夹具座与丝杆螺母固定连接,夹钳活动夹是能够在水平方向上自由移动的。夹钳固定夹和活动夹中间开有螺纹孔,功能是与夹钳手柄连接。夹钳固定夹和活动夹组合在一起,当摇动丝杆手柄的时候,活动夹能够自由来回移动,从而固定穿过于其间的钢筋,实现上下钢筋对焊时能够准确定位及稳定焊接。夹钳固定夹和活动夹的三维模型如图5和图6所示。
1.6 手柄的设计与建模
如1.5节所述,夹钳手柄的主要功能是夹紧固定钢筋,夹钳手柄通过螺纹孔和固定夹及活动夹相连接。夹钳手柄连接杆上设计有圆孔。夹钳手柄如图7所示。
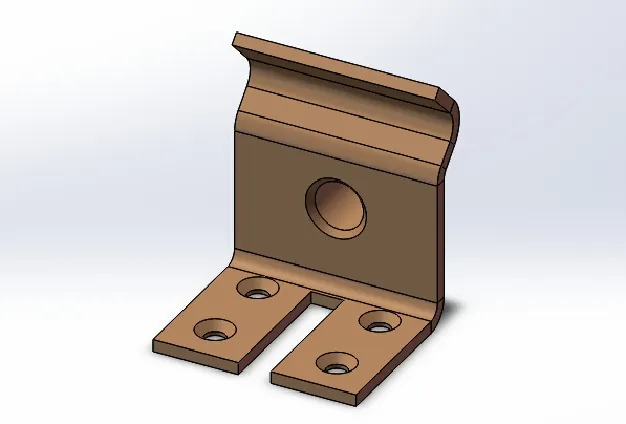
图5 夹钳固定夹
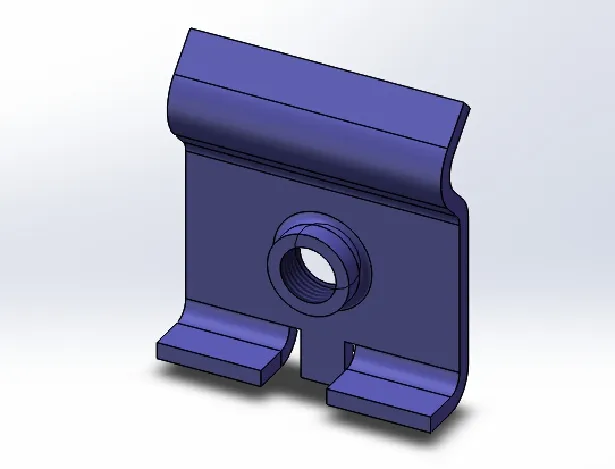
图6 夹钳活动夹
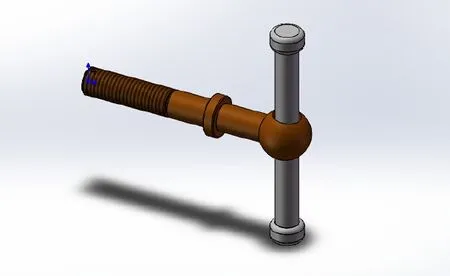
图7 夹钳手柄
夹具手柄的主要功能是通过与锥齿轮连接,施加外力带动锥齿轮的转动。设计遵循方便省力的原则。夹具手柄的三维模型如图8所示。
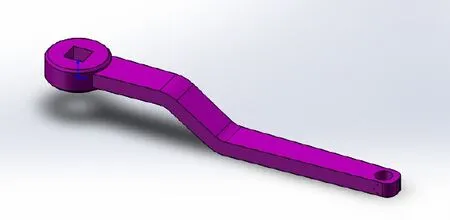
图8 夹具手柄
1.7 夹具提手的设计与建模
夹具提手的功能是携带夹具,设计主要遵循方便携带及省力的原则。其三维模型如图9所示。
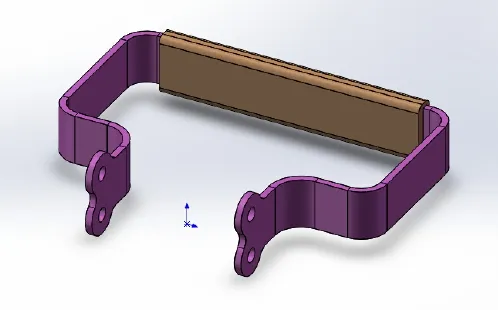
图9 夹具提手
2 钢筋对焊夹具的虚拟装配
钢筋对焊夹具的零部件完成设计及建模后,就要在软件中对其进行虚拟装配。虚拟装配的主要流程是,首先确定各个零部件的装配层次,再确定装配顺序,再确定装配约束。虚拟装配一般有两种方式:自顶向下和自底向上。自顶向下是在装配体环境下进行零件的设计,而自底向上是指采用已经设计好的零件进行部件和整机的装配[3]。根据钢筋对焊夹具的实际情况,本文采用自底向上的装配方式对钢筋对焊夹具进行虚拟装配,并对其装配体进行干涉检查和质量检查。
2.1 添加约束
对钢筋对焊夹具各个零部件的自由度及零部件之间的运动关系进行分析,确定运动副的约束形式,主要用到了同轴心、平行、重合及齿轮配合。例如夹钳手柄和夹钳固定夹和活动夹之间的配合及丝杆和丝杆螺母之间的配合用到了同心,夹钳固定夹与夹具座之间的装配会用到重合和平行,互相啮合的两个锥齿轮装配会用到机械配合里的齿轮配合。最后完成的钢筋对焊夹具三维装配体如图10所示。
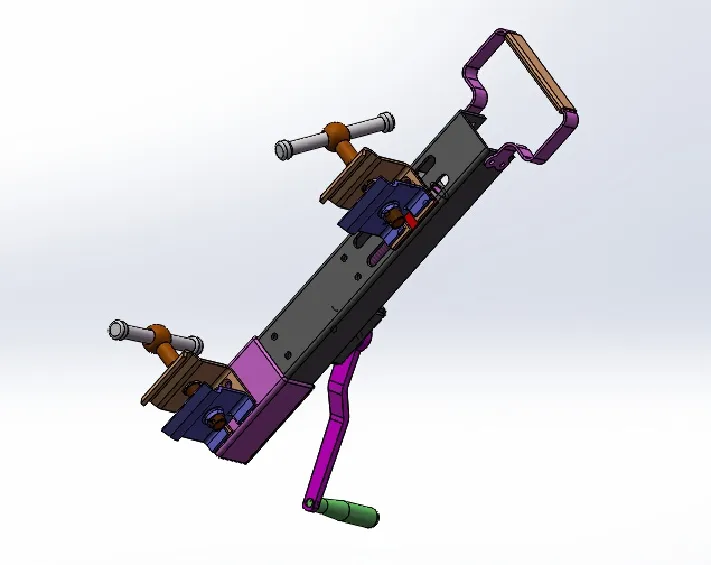
图10 钢筋对焊夹具三维模型
2.2 干涉检查和质量检查
干涉检查的主要目的是发现装配体中静态零部件之间的干涉,以确保各零部件之间的间隙适当,避免发生干涉;质量检查是计算出各零部件的准确质量,从而再估算出装配体的质量。
1)干涉分析和检查
一个复杂的装配体中,很难凭视觉来检查零部件之间是否有干涉情况可以在零部件之间进行干涉检查,并能查看检查到的干涉体积。干涉检查分为静态干涉检查和动态干涉检查。静态干涉检查的只是装配体的零部件在一定条件下的干涉,当装配体运动时,干涉检查所需的方法即是一种动态地检查碰撞的方法。干涉检查能够发现设计的零件再装配体中存在问题的部分,然后依据装配体的结构和零部件的干涉情况修改零件原模型[4]。应用SolidWorks中的“干涉检查”分析,能够检查出钢筋对焊夹具装配体中各零部件之间的干涉关系。干涉检查结束后,发现钢筋对焊夹具各零部件之间不存在静态干涉,如图11所示。
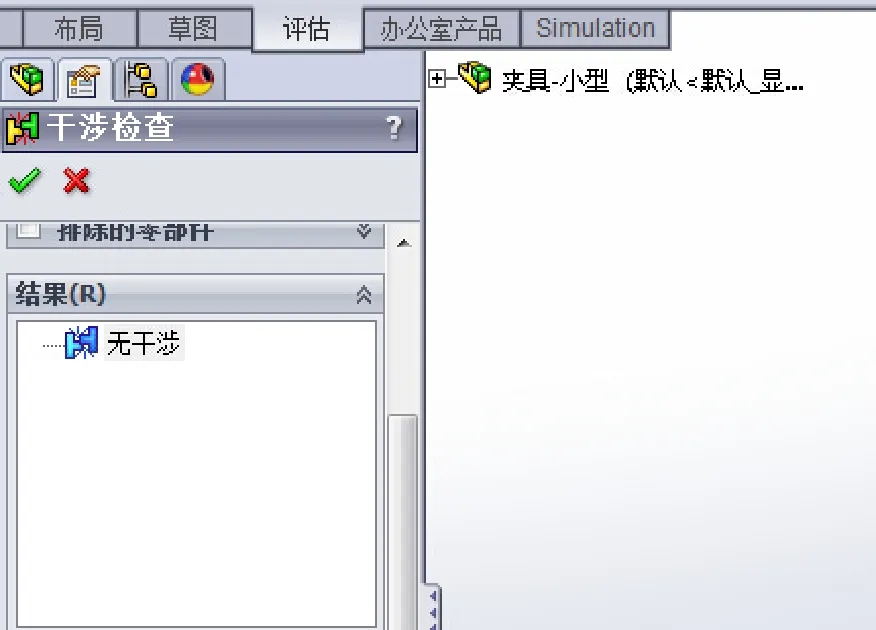
图11 干涉检查
2)质量检查
应用SolidWorks软件的“质量特性”功能,通过参数设置,定义材料的密度,从而记算出各零件的质量和整个装配体的质量。以夹具座为例,选取材料主要参数:ANSI1045钢,冷拔,计算出夹具座的质量为722.211g,如图12所示。
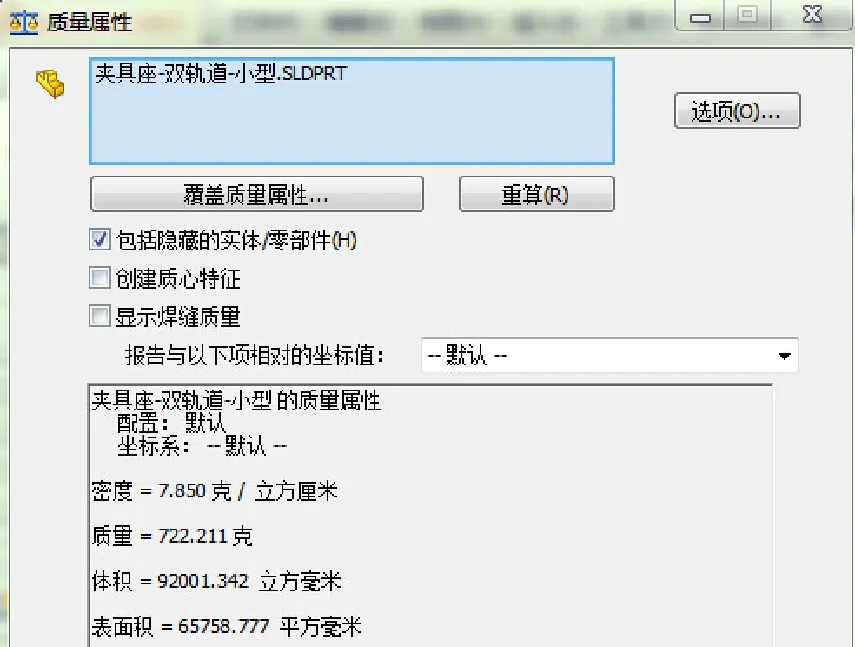
图12 质量检查
3 钢筋对焊夹具的运动仿真
将钢筋对焊夹具装配好以后,对其进行运动仿真。在SolidWorks环境中运行Motion插件,在SolidWorks Motion管理器中设定钢筋对焊夹具的运动仿真参数。利用已经创建好的夹具装配体模型建立起运动仿真算例。
在装配体环境中,点击SolidWorks软件界面左下角的运动算例1,将其重命名为运动仿真。单击运动仿真按钮,则SolidWorks界面下方出现Motion运动仿真管理器,如图13所示。
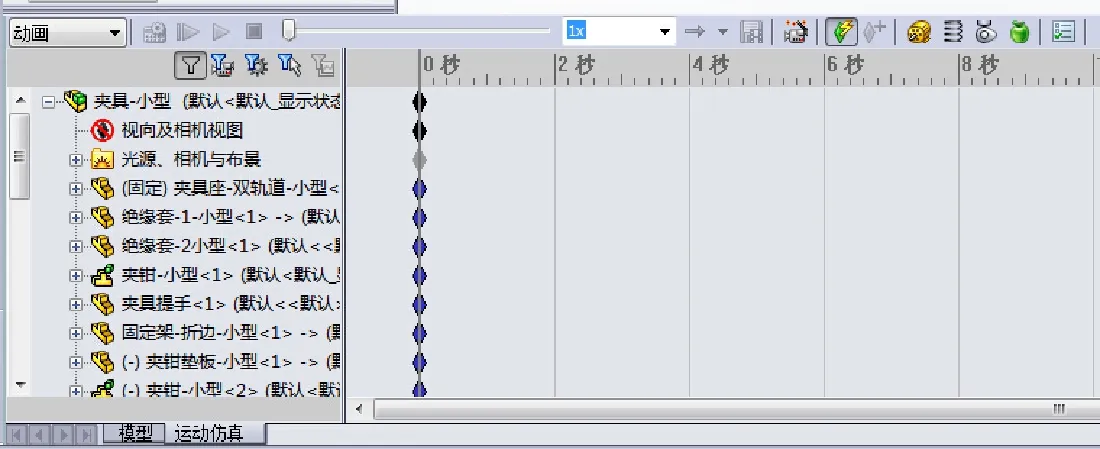
图13 motion运动仿真管理器
下面结合工程实际情况简述钢筋对焊夹具的运动过程。将要准备焊接的钢筋置于夹钳活动夹和固定夹之间,摇动夹钳手柄,从而使夹钳活动夹向固定夹方向运动,从而实现钢筋的夹紧固定;重复上述过程,将另外一根钢筋也夹紧固定。再摇动夹具手柄,带动夹具丝杆的运动,因丝杆与丝杆螺母是旋合在一起的,从而带动丝杆螺母及其上的夹钳运动,最终实现上下两根钢筋的对接。在两个钢筋的对接处覆盖焊接药剂,与电焊机接通后即可实现钢筋的对焊。
从上述过程可知,钢筋对焊夹具主要存在水平方向(夹钳活动夹的运动)和竖直方向(夹钳的运动)的运动,且两个方向的运动是错开的,先是夹钳活动夹作水平方向的运动夹紧固定钢筋,接着是安装在丝杆螺母上的夹钳在竖直方向的运动,实现上下两根钢筋的对接。
在视图栏中的相应时间位置放置键码,不同的时间段代表不同的运动过程。如图14所示为夹钳活动夹的在水平方向运动过程。
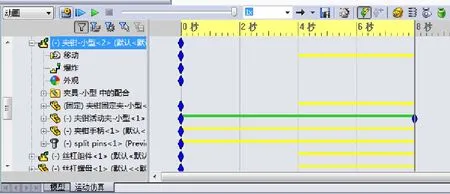
图14 夹钳活动夹运动过程
将夹钳活动夹的运动过程设置好以后,开始设置夹钳的竖直方向的运动。将该方向的运动过程设置好后,两者运动过程示意图如图15所示。
动画仿真完成以后,可将仿真动画的结果输出。单击“保存动画即可将仿真动画保存为AVI格式或其他文件类型,如图16所示。
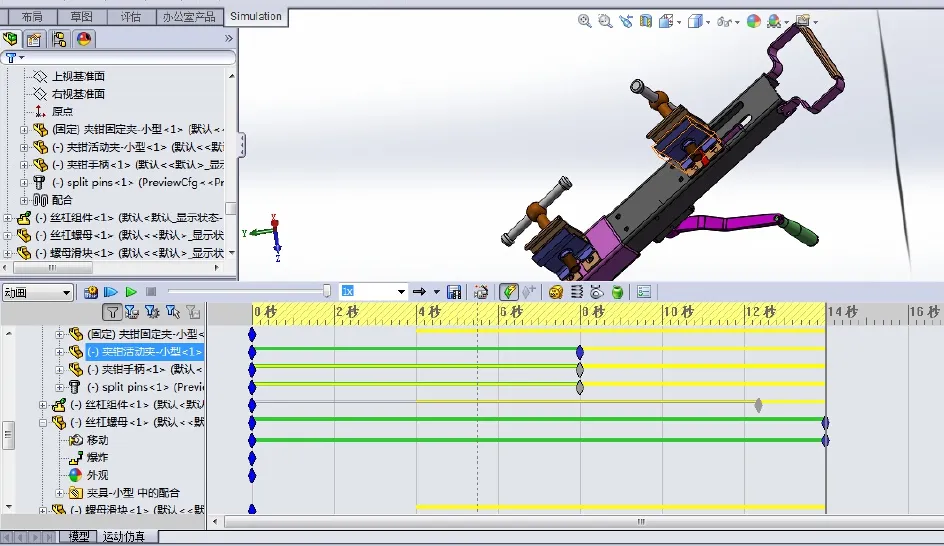
图15 钢筋对焊夹具运动

图16 动画保存
4 结束语
利用SolidWorks软件实现了对钢筋对焊夹具各零部件的设计及建模,完成了三维模型的装配,并对装配体进行了装配分析。最后运用SolidWorks自带的Motion插件实现了对钢筋对焊夹具的运动仿真。这种虚拟设计的优势在于不需要制造真实的物理样机,即可实现对产品的设计和仿真,节约了产品从设计到上市的时间成本和制造成本。
参考文献:
[1] 张贵萍.电渣压力焊在工程中的应用[J].工艺与设备,2008(9): 197-198.
[2] 王勇.钢筋电渣压力焊缺陷产生的原因及预防措施[J].装备制造技术,2009(7):134-135.
[3] 许延奇.面向产品装配的工艺管理系统研究[J].CAD/CAM制造业信息化,2004(4):31-34.
[4] 孙雪莲.扒渣机械手的运动仿真与结构优化[D].兰州,兰州理工大学,2005.
作者简介:贺甲甲(1988 -),男,安徽阜阳人,硕士研究生,研究方向为模具CAD/CAM。
收稿日期:2015-10-07
中图分类号:TH12
文献标识码:A
文章编号:1009-0134(2016)01-0120-04
