大型翻转机构型设计
2016-03-18Thetypedesignoflargescaleupender
The type design of large scale upender
王 雷
WANG Lei
(潞安职业技术学院 机电工程系,长治 046204)
大型翻转机构型设计
The type design of large scale upender
王雷
WANG Lei
(潞安职业技术学院 机电工程系,长治 046204)
摘 要:以开发多自由度的新型90°/180°重载翻转机为目标,基于筒节这一典型的产品,深入分析了大型工件的翻转过程,提出大型工件的翻转原理,并根据翻转过程中大型工件的受力状态,进一步提出可变形态的统一约束模型;据此,创新地提出了3自由度串联、3自由度混联以及4自由度混联三种翻转机构型。这三种构型为大型重载翻转机的方案设计提供了重要的理论依据。
关键词:翻转机;约束模型;构型
0 引言
制造业是国家实现新兴工业化的基础保证。大型构件的制造则体现了国家的工业化水平[1]。在制造大型构件的生产链中,多处需要大型翻转机来辅助改变工件的位置和姿态。
对于大型构件来说,现有的翻转机类型如CL型、L型和U型翻转机的承载较低,而且多为单自由度或两自由度翻转机,翻转角度单一,不能同时满足生产环节中各工序的翻转要求[2~5]。在生产实际中还时常利用钢索搭配天车和人工的方法进行翻转[6,7]。这种方法虽然有效,但存在安全隐患。发展多自由度的大型重载翻转机,可提高生产链的运行速度和生产能力,填补国内重大辅助装备的技术空白。
本文旨在通过研究钢索翻转的原理,提出大型工件翻转的约束模型,并据此设计大型翻转机的构型。
1 大型核电翻转机的设计要求
目前,我国的大型工件生产已形成完整的生产链条。各主要工序之间对接时,工件的位置和姿态往往需要被改变。根据生产实际情况,提出大型翻转机的设计要求如下:
1)应同时具备翻转90°和180°的功能。
2)满足目前定型生产的所有工件,即各种形状、所有尺寸工件翻转的要求。
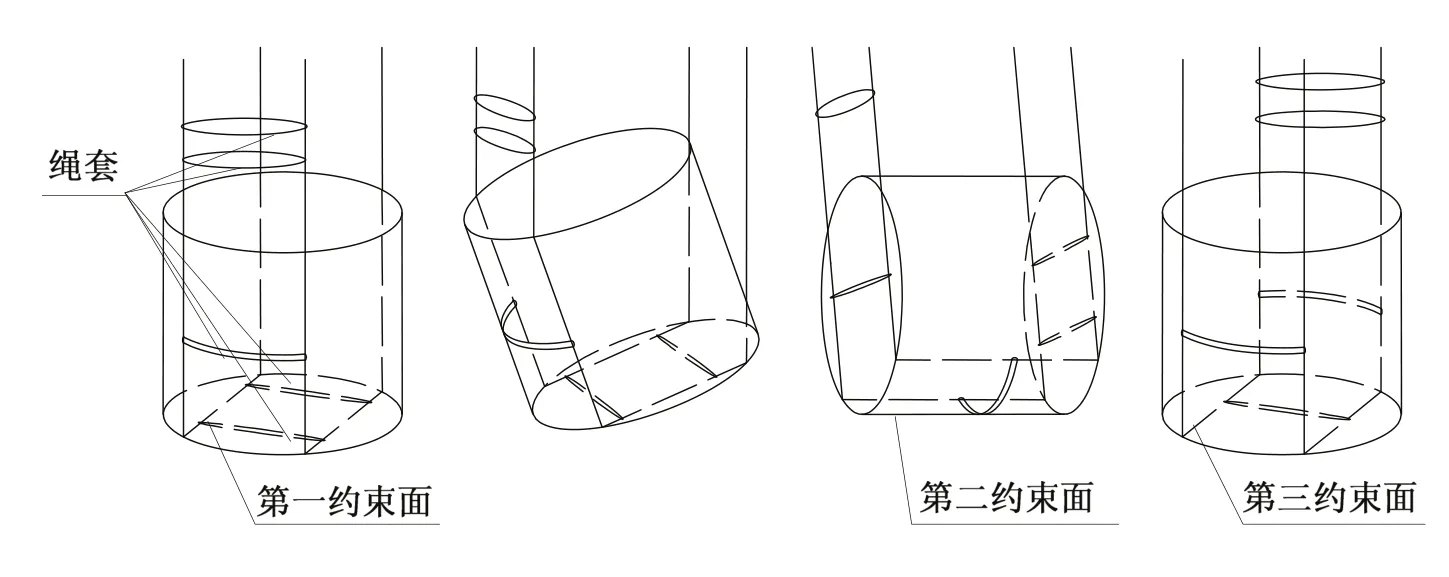
图1 筒节翻转过程
3)所有工件在翻转过程中均不需装卡、全程依靠重力封闭。
4)翻转过程中,工件定位和装夹均不能借助除翻转机之外任何辅助工具或附件。
2 大型工件钢索翻转原理
一直以来,对大重型工件,生产实际中常利用两条钢索搭配天车和人工进行翻转。
以筒节为例,其翻转过程如图1所示:利用两根等长的主起吊软钢索,缓慢的兜挂起工件、并稳定平衡在空中一定高度上;沿两条主起吊钢索的垂直方向,添加横向绳套。通过天车驱动钢索的一端向上拉起,另一端向下放,从而使得工件在主起吊软钢索上缓慢翻滚。据此,可概括出钢索的翻转原理:初始状态时,工件在重力、钢索与工件接触处正压力的作用下处于受力平衡状态,当钢索的一端上拉、另一端下放时,原有的平衡被打破,工件发生一定的横向漂移,其重心亦随之偏移,且与支点的距离逐渐拉大,产生较大的翻转力矩,驱使工件自动的调整位置和姿态,在不断寻找新的平衡过程中完成滚转。控制钢索的收放位置即可实现工件的不同角度翻转。其实质是将钢索的上下直线运动可控制地转化为工件在空中的滚转运动。
由于钢索的柔性和多自由度性,钢索翻转可适用于任何形状、尺寸以及重量的工件;翻转过程中,不需要任何附件辅助装夹和定位;而且生产成本低、易于实现。但这种方法占用空间较大,翻转过程缓慢,稳定性、可控性较差;尤其是对工件的侧面、侧向运动几乎无约束,容易发生侧翻事故。
3 统一约束模型
从上述钢索翻转过程可以看出,翻转过程中钢索和横向绳套与工件外凸轮廓始终保持相吻合接触,对工件起着吊挂和约束定位的作用,相当于“柔性工作台”,可根据工件的外廓形状自动调整。
为了以后便于描述,现做出如下规定:
工件初始状态时,外廓表面中位置最低、用于承担工件全部重量的依托表面定义为第一约束面;工件翻转90°时,外廓表面中最低、用于承担工件全部重量的依托表面定义为第二约束面;工件翻转180°时,最低、用于承担工件全部重量的依托表面定义为第三约束面如图1所示。
根据工件基本几何特征,工件封闭的外廓表面的组合方式为:即端面+分界线+回转面+分界线+端面。工件被约束定位的情况如下:
1)第一约束面为端面定位,钢索和横向绳套与工件端面完全吻合,所构成的约束具有刚性平面属性。
2)当工件滚转90°时,第二约束面为回转面,钢索和横向绳套与工件回转面完全吻合,所构成的约束具有刚性V型槽面的属性。
3)当工件继续滚转90°(总翻转角度180°)时,第三约束面为端面,钢索和横向绳套与工件端面完全吻合,所构成的约束具有刚性平面属性。
当工件滚转90°时,将第一、二两个约束面组合在一起,由于工件的端面与回转轴线为垂直的,将彼此夹角固定为90°,从而构成最简单的L型约束模型。当工件滚转180°时,同理,必须将第一、二、三约束面组合在一起,相邻面彼此夹角固定为90°,从而构成三约束的U型约束模型。
由此可见,翻转机要同时具有90°、180°两种翻转功能,约束模型必须是可在L型与U型之间相互转换。为此,在U型约束模型的第三约束面与第二约束面之间设置一门式转动副,给第三约束面提供一个相对第二约束面的90°翻转运动。当第三约束面与第二约束面重合时,三个约束面构成L型;当第三约束面向内转过90°与第二约束面垂直时,三个约束面构成U型。工件的不同规格和尺寸本质上是沿回转轴线方向长度的变化,在第二约束面上设置移动副,并与门式转动副串联,使得第三约束面与第一约束面之间的距离可变。第三约束面可以沿第二约束面移动、沿转动副轴线翻折。增设两个自由度形成可变结构的、通用的U型约束模型。
考虑到实际生产中,待翻转的工件的状态可能发生变化,将三个约束面设计为平面与V形槽面的组合刚性体,增强翻转机对工件的侧向约束能力。
综上所述,统一的约束模型为可变形态的U型约束模型如图2所示。第三约束面相对第一、二约束面具有2自由度的移动和转动。
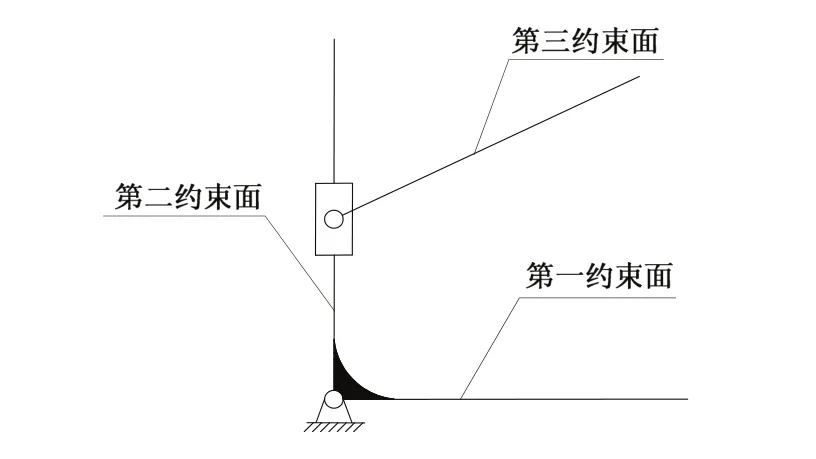
图2 统一约束模型
4 大型工件冷加工翻转机构型
根据钢索翻转原理,工件在钢索的作用下绕浮动轴线缓慢滚转运动的状态,可以等效地转换成圆柱状车体绕固定中心轴线缓慢滚转运动的状态。据此,钢索翻转被转化为大型CU型结构翻转机翻转。
翻转机主车体外廓采用圆柱状面来实现,有其突出的优点:承载能力大,可实现无障碍连续滚转;滚转运动易于控制、并提供强有力的侧向约束,从根本上消除了钢索翻转时的工件侧翻、脱落问题;翻转过程无冲击、安全平稳,工件翻转过程快捷,极大地提高生产效率。将翻转机车体结构选为圆柱体,便于实现重力封闭和定位,同时有利于采用齿轮驱动或链轮驱动的方式来完成车体滚转。
大型CU型结构翻转机至少具有3个自由度,其基本独立运动包括:1)一个主运动,即圆柱状车体的90°以及180°滚转运动,用R0表示;2)一个移动,即U型工作台第一、第三约束面之间距离随工件尺寸的变化移动,用P表示;3)一个转动,即第三约束面相对第二约束面的翻转运动,即L型工作台和U型工作台的转换运动,用R1表示。
根据大型翻转机的功能设计要求,整体滚转运动是主运动,必备的运动;可变形态U型约束模型的第一约束面与第二约束面保持垂直固结。第一、第三约束面之间的相对移动P,第三约束面相对第二约束面的转动R1,两个运动的不同的组合方式形成了大型CU型结构翻转机的各种不同构型。
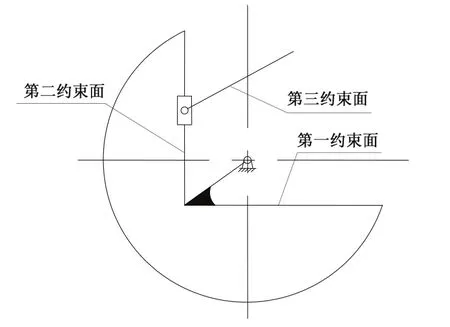
4.1 翻转机3自由度串联构型
将移动副P设定在第二、第三约束面之间,第三约束面相对第二约束面的转动R1设置在移动副P与第三约束面之间。其中移动副P沿着主运动(滚转轴线)的垂直方向、第三约束面相对第二约束面的转动R1的轴线与主运动(滚转轴线)平行。从而形成第一种构型:主运动(滚转)、移动、第三约束面折翻运动的3自由度串联构型。如图3所示,构型表达式为:R0-P-R1。
4.2 翻转机3自由度混联构型
将移动副P设定在第一约束面上,使其具有固定工作台与移动工作台双重功能;第三约束面相对第二约束面的转动R1设置在相对第一约束面的最大距离处(其值由最大工件高度确定)。其中移动副P沿着第一约束面的垂直方向、第三约束面相对第二约束面的转动R1的轴线与主运动(滚转轴线)平行。形成第二种构型:主运动(滚转)、分别与移动、第三约束面折翻运动的串联构型,移动、第三约束面折翻运动并联的3自由度混联构型。如图4所示,构型表达式为:R0-P-R1。
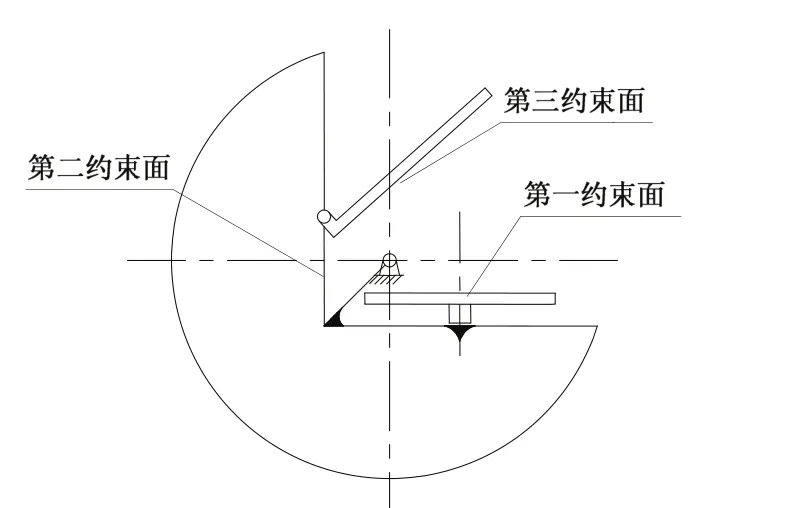
图4 翻转机3自由度混联构型
4.3 翻转机4自由度混联构型

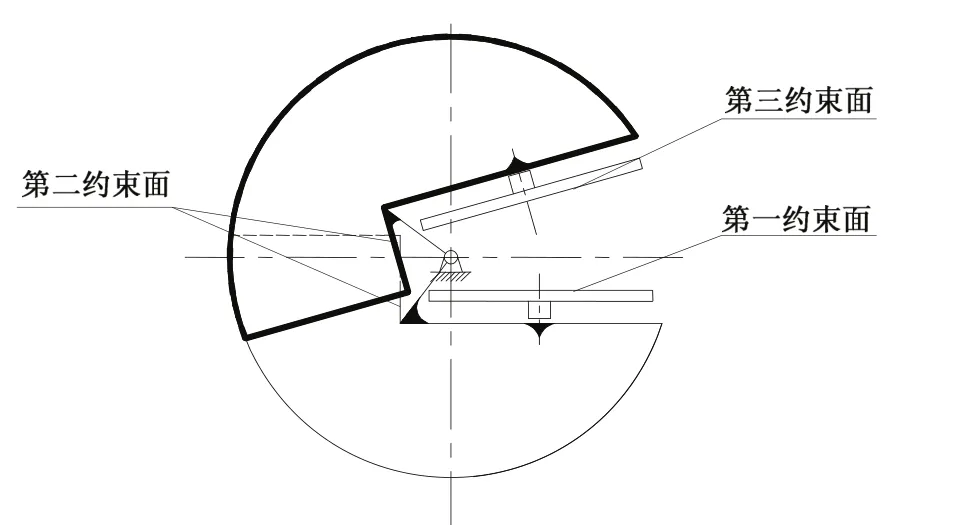
图5 翻转机4自由度混联构型
5 结论
当大型工件在加工和装配过程中需要进行翻转变位时,如果仍采用人工翻转的方法,不仅生产率低,劳动强度大,而且存在很大的安全隐患。大型多自由度翻转机作为一类辅助性装备,能有效地满足实际生产的需要。三种构型方案的提出说明了大型多自由度翻转机的可行性,也为后续的技术和结构方案设计提供了理论依据。本文的主要结论如下:
1)深入分析了实际生产中大型工件利用钢索翻转的过程,总结了钢索翻转的原理。
2)根据钢索翻转的原理,建立了大型工件翻转的、可变形态的统一约束模型。
3)基于统一约束模型,通过简化和等效转换,创新的提出了三种翻转机构型。
参考文献:
[1] 高峰,郭为忠,宋清玉,等.重型制造装备国内外研究与发展[J].机械工程学报,2010,46(19):93-106.
[2] 李长江,林顺洪,朱新才.大型轴承座翻转装置的虚拟样机设计[J].煤矿机械,2008,29(4):199-201.
[3] 赵誉,向章羚,代洪波,等.大吨位隧道混凝土管片翻转机[P]. CN:200920225725.5,2010-5-19.
[4] 王化清.大型工件翻转设备的设计与应用[ J ] .金属加工,2010,(1):42-45.
[5] 籍世力,姜玉昌,隋景涛.球形封头翻转施工的优化方案[J].炼油与化工,2009,(3):18-19.
作者简介:王雷(1985 -),女,山西运城人,助教,硕士,研究方向为机械设计及自动化。
收稿日期:2015-09-24
中图分类号:TH6
文献标识码:B
文章编号:1009-0134(2016)01-0117-03
