载货汽车EPS系统粒子群优化模糊控制仿真分析
2016-03-18SimulationanalysisoftruckEPSsystembasedonPSOoptimizationfuzzycontrol
Simulation analysis of truck EPS system based on PSO optimization fuzzy control
杨意品1,曹兴举1,巩建强2
YANG Yi-pin1, CAO Xing-ju1, GONG Jian-qiang2
(1.新疆交通职业技术学院,乌鲁木齐 831401;2.交通运输部 公路科学研究院,北京 100088)
载货汽车EPS系统粒子群优化模糊控制仿真分析
Simulation analysis of truck EPS system based on PSO optimization fuzzy control
杨意品1,曹兴举1,巩建强2
YANG Yi-pin1, CAO Xing-ju1, GONG Jian-qiang2
(1.新疆交通职业技术学院,乌鲁木齐 831401;2.交通运输部 公路科学研究院,北京 100088)
摘 要:提出了一种基于粒子群优化模糊控制的载货汽车EPS系统控制策略,在完成载货汽车EPS系统总体设计的基础上,结合驾驶人转向操纵主观感受及对路感的要求设计了助力特性曲线,建立了转向系模型,7自由度整车动力学模型,直流电动机模型,以直流电机电流作为控制目标,采用粒子群优化模糊控制策略,以MATLAB/Simulink作为仿真平台,以自卸货车为研究车型建立了装备EPS系统的载货汽车仿真模型。仿真实验结果表明:与传统模糊控制相比较,粒子群优化模糊控制能够有效地提升载货汽车EPS系统的整体动态响应,并且取得了良好的转向轻便性和操纵稳定性。
关键词:载货汽车;电动助力转向;助力特性曲线;粒子群优化;模糊控制;仿真
0 引言
电动助力转向系统(electric power steering,EPS)与液压助力转向系统相比,由于其自身的优点已经广泛应用于乘用车领域。载货汽车转向系统多采用循环球式转向器,目前普遍应用液压助力转向系统或者是电子液压助力转向系统。与乘用车相比较,载货汽车前轴载重大,并且转向系统的结构不同,因此载货汽车EPS系统的总体设计及控制策略的制定更加需要有针对性[1,2]。
在乘用车EPS系统控制领域,国内外研究机构及专家学者已经开展了大量的研究并取得了一定的研究成果,主要采用PID控制算法[3]、模糊控制算法[4]、模糊PID控制算法[5]、神经网络PID控制算法[6]、神经网络控制算法[7]、滑模控制算法[8]以及H∞控制理论[9]等。上述的研究中取得了一定的成果,但是仍然存在一些问题,例如:整车模型大多采用以二自由度两轮模型,无法对模拟行车及原地转向时的地面阻力力矩对转向系统的影响;采用线性轮胎模型无法模拟载货汽车非线性状态;控制算法一旦设定不能够根据车辆的行驶路况和运行状态实时调整,以获得最佳的控制效果。
鉴于此,本文提出了一种基于粒子群优化模糊控制策略,根据载货汽车转向状态通过实时调整控制因子控制助力力矩的大小,以期望获得最佳的控制性能。
1 系统的总体设计及动力学建模
载货汽车EPS系统基本结构组成如图1所示,主要由各类传感器、机械转向系、电子控制单元、电磁离合器、助力电机等部件构成,采用转向轴式助力形式[10]。
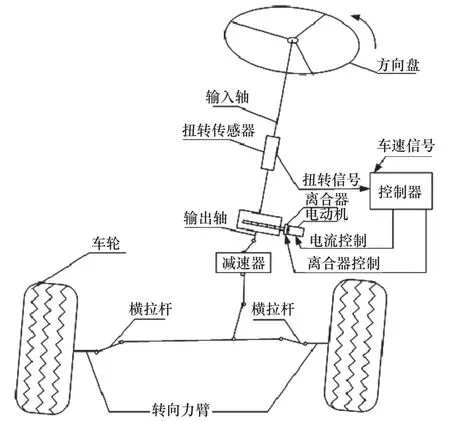
图1 载货汽车EPS系统结构组成
1.1 转向系统模型
根据载货汽车机械转向系统的结构特点,如图2所示,将转向轴分为上下两部分,假设驾驶人转向盘力矩输入为Td,助力矩为Ta,下转向轴阻力矩为Tg,将力学传递等效简化处理得到数学模型为:

式中:Jw、Jg分别为上下转向轴的转动惯量;、分别为上转向轴的角速度和角加速度;、分别为下转向轴的角速度和角加速度;Cw、Cg分别为上下转向轴的阻尼系数。
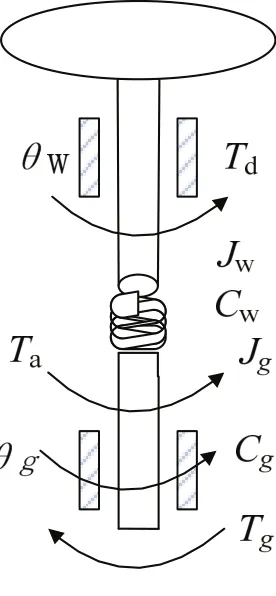
图2 载货汽车EPS系统等效简化示意图
1.2 7自由度整车动力学模型
本文综合考量车辆横向及横摆运动特性,建立7自由度整车模型[11],如图3所示。

图3 7自由度整车动力学模型
X轴方向的受力分析:

Y轴方向的受力分析:

Z轴方向的力矩分析:
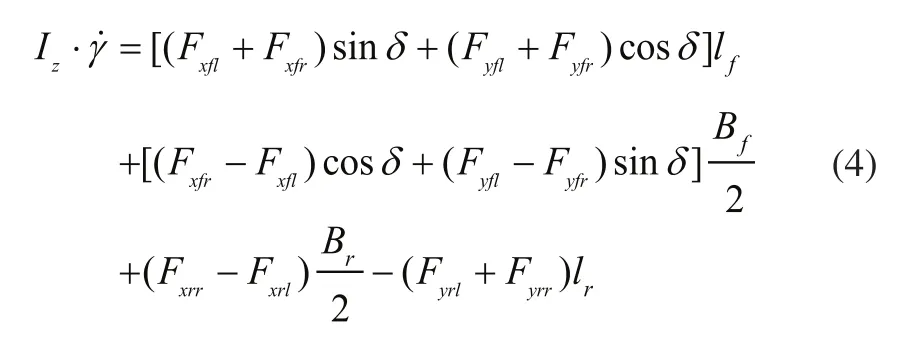
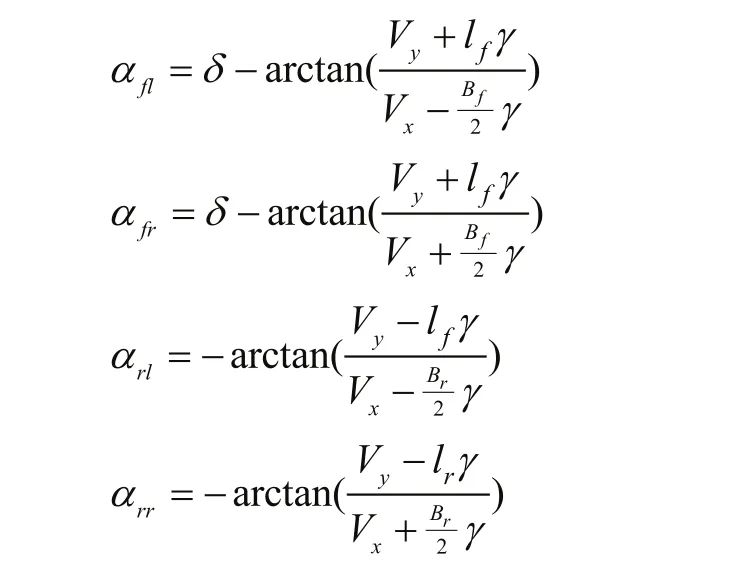
式中:m为整车质量;δ为前轮转角;Vx、Vy分别为横纵向车速;γ为横摆角速度;Fxfl、Fxfr、Fxrl、Fxrr分别为左前轮、右前轮、左后轮、右后轮x轴方向侧偏力;Fyfl、Fyfr、Fyrl、Fyrr分别为左前轮、右前轮、左后轮、右后轮y轴方向侧偏力;lf、lr分别为前后轴距;Bf、Br分别为前后轴轮距;Iz为整车绕Z轴的转动惯量。
轮胎侧偏角:
各个轮心纵向速度:
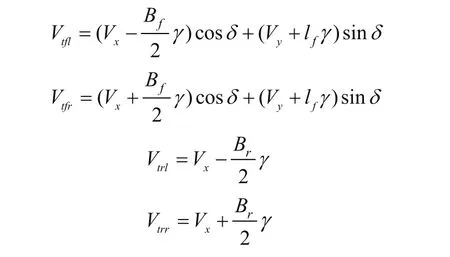
式中:Vtfl、Vtfr、Vtrl、Vtrr为轮胎坐标系下的轮胎纵向速度。
1.3 轮胎模型
轮胎模型选择非线性的Dugoff模型:
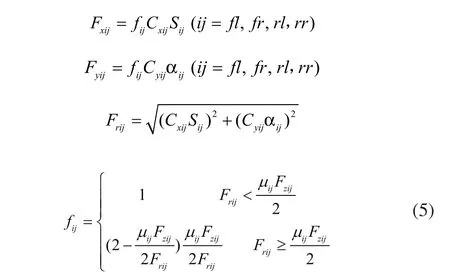
式中:Cxij、Cyij分别为轮胎的纵向和侧向刚度;Fzij为轮胎垂直载荷;αij为轮胎侧偏角;µij为附着系数;Sij为轮胎滑移率。
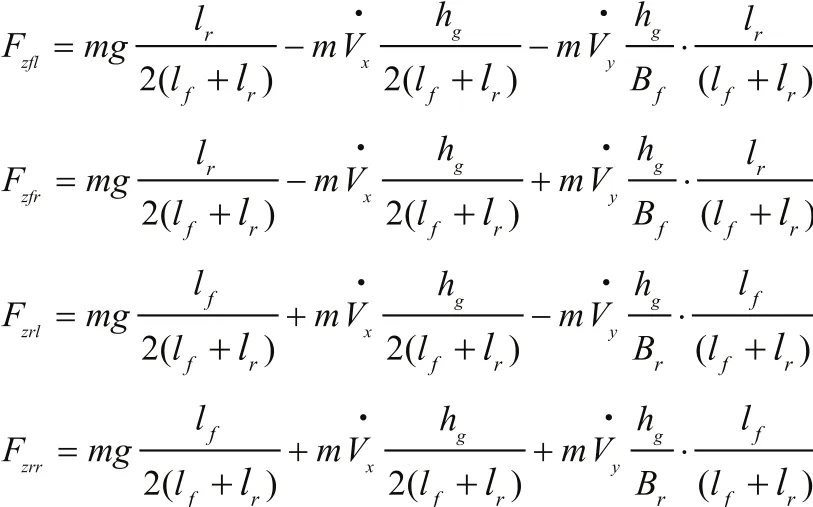
各轮胎垂向载荷:
1.4 直流电动机模型
EPS系统的助力电机为永磁式有刷直流电动机,以直流电动机的端电压为控制目标,图4为简化直流电动机等效结构图,根据电路特点建立直流电动机的数学模型:

式中:Kb为反电动势系数,θm为电动机转角。
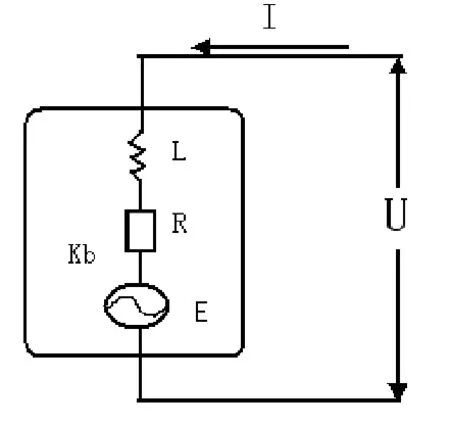
图4 直流电动机的等效结构图
2 助力特性曲线
由于载货汽车的转向器与乘用车不同,本文根据文献[12]的转向盘原地转向试验数据,结合驾驶人转向操纵主观感受及对路感的要求,设定转向盘最小输入力矩Td0及最大助力矩Tdmax分别为2N·m和30N·m。
转向盘转矩梯度f(Td)的拟合公式为:

速度梯度K(v)的拟合公式为:

综合上述拟合公式本文采用的助力特性为:
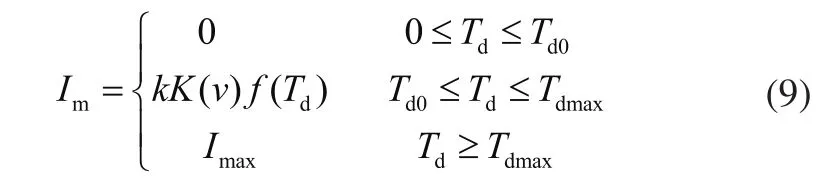
结合转向盘转矩梯度和速度梯度以及助力特性,数据拟合得到三维助力特性曲面,如图4所示,曲面反映了转向盘转矩、行驶车速以及目标助力电流三者之间动态的关系。
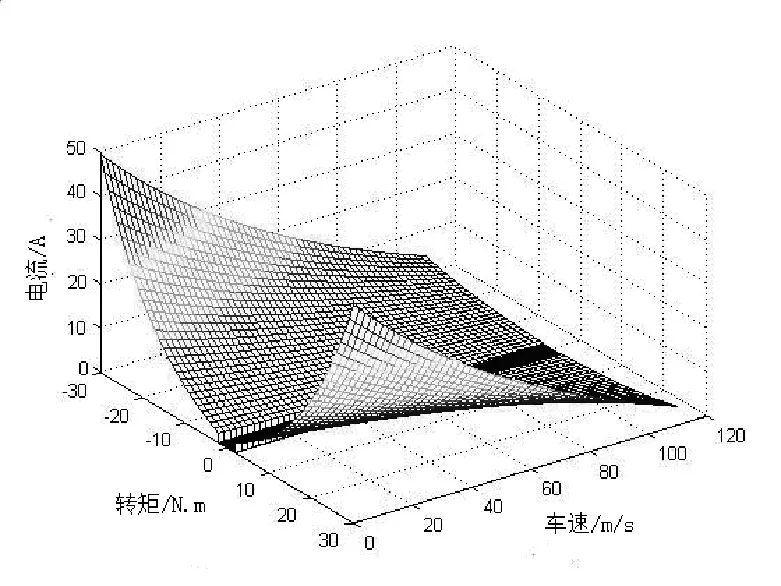
图5 三维助力特性曲面
3 粒子群优化模糊控制策略
本文利用助力特性曲线得到目标控制电流,通过控制目标电流与实际电流的偏差,利用粒子群优化模糊控制算法在线调节模糊控制器的加权因子ke、kec和kI来控制助力电流的大小。图6为粒子群优化模糊控制策略。

图6 粒子群优化模糊控制策略
将控制变量e、ec和I分别量化为[-6, 6]、[-0.3, 0.3] 和[-6, 6],模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。子集中的元素分别代表负大,负中,负小,零,正小,正中,正大。模糊控制器的输入输出变量的隶属度函数均采用三角隶属度函数。规定转向盘顺时针转动为正向,当e与ec较大时,若两者均取值PB,则需要输出较大的负向助力力矩;当e与ec较小时,若两者均取值NS,则需要输出较小的正向助力力矩。
粒子群优化算法(Particle Swarm Optimization,PSO)通过粒子种群实施个体及全局寻优来获得最佳优化,适宜于非线性系统中应用[13]。
给定粒子群组成:
各个粒子的位置和速度信息为:
第k+1维中粒子群优化关系式为:

式中:ω为惯性权重;vid(k)为第k维空间中粒子速度;xid(k)为第k维空间中粒子位置;c1、c2为加速因子;rand()为随机数;Pid(k)、Pgd(k)分别为粒子的个体极值和种群的全局极值。
为了加速粒子寻优过程,根据文献[12]建立适应度函数[14]:

式中:y(k)为k时刻电流偏差;ω'为加权系数。
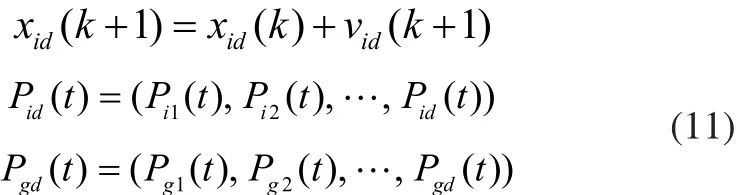
粒子群优化算法中的参数初始化设置:初始化粒子数量为30,最大迭代次数设置为150,惯性权重ω为0.9,粒子速度取值[-3, 3],粒子位置的取值[0, 3],加速因子c1、c2均为1,模糊控制比例因子ke、kec和kI取值为[0, 6]之间的30组随机值。加权系数ω'取值0.6。整个粒子群优化流程如图7所示。
图7 粒子群优化流程图
4 仿真分析
为了表明粒子群优化模糊控制的优越性和鲁棒性,在MATLAB/Simulink环境中建立载货汽车EPS系统仿真模型,研究车型为载重7715kg的轻型自卸式货车,其前轴载荷为2750kg,对比分析传统模糊控制和加入粒子群优化的模糊控制的仿真结果,表1为载货汽车EPS系统部分仿真参数。
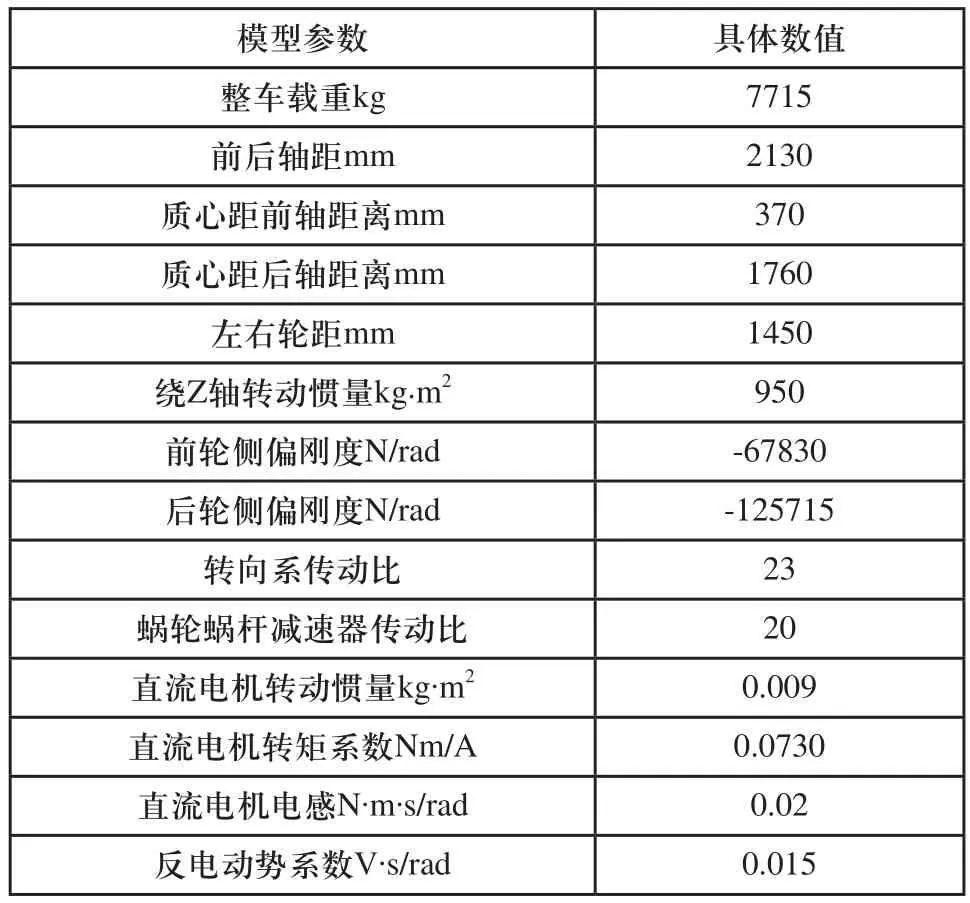
表1 载货汽车EPS系统部分仿真参数
4.1 转向轻便性试验
双纽线试验通常被用来评价车辆的转向轻便性好坏,如图8所示,试验中假设载货汽车以恒定车速10km/h绕8字行驶。传统模糊控制条件下,转向过程中当转角达到最大角度时,该时刻状态下的转向盘转矩为16.42N·m,最大转矩为22.85N·m;而粒子群优化模糊控制条件下的转向盘转矩为14.58N·m,最大转矩为20.30N·m,与模糊控制相比较,采用粒子群优化模糊控制可以获得更好的转向轻便性。
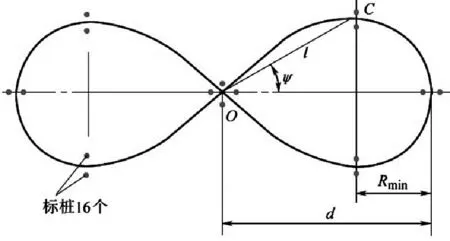
图8 双纽线试验设置
4.2 双移线试验
双移线试验主要用来反映极限工况下车辆的操纵稳定性,假设试验以恒定行驶车速为60km/h完成双移线行驶轨迹,转向盘转角输入曲线如图9所示,图10和图11分别为转向盘转矩和转角响应仿真结果,从图中可以看出,与模糊控制相比较,粒子群优化模糊控制状态下,转向盘转矩以及转向转角助力响应曲线的最大超调量减小,转向跟随性得到了提高,驾驶人仅需要较小的转向力和转向角输入就能够完成转向要求,获得了更加良好的转向轻便性。
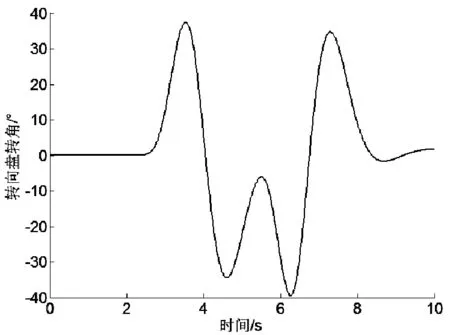
图9 转向盘转角输入曲线
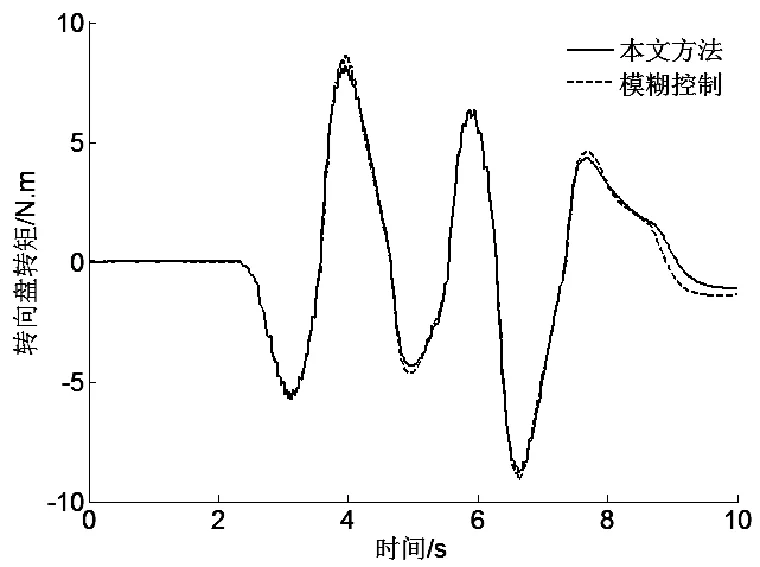
图10 方向盘转矩助力响应仿真结果
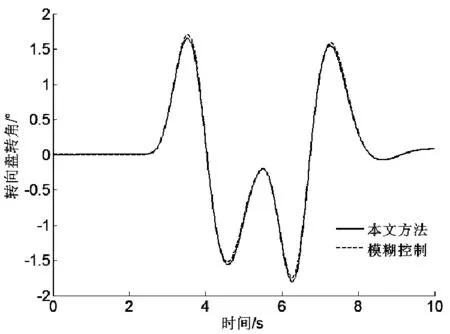
图11 方向盘转角助力响应仿真结果
图12与图13分别为施加模糊控制及粒子群优化模糊控制状态下的车辆横摆角速度和质心侧偏角响应仿真结果,从图中可以看出,与传统模糊控制相比,施加粒子群优化之后,横摆角速度和质心侧偏角响应自整定速度加快、最大超调量幅值明显减小,动态控制效果得到了明显的改善。
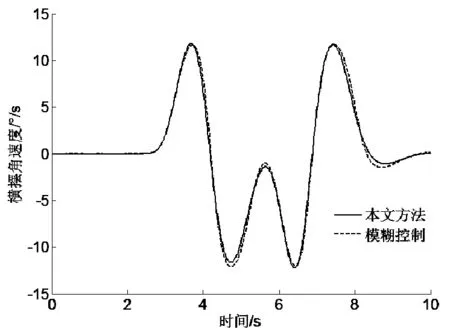
图12 横摆角速度响应仿真结果
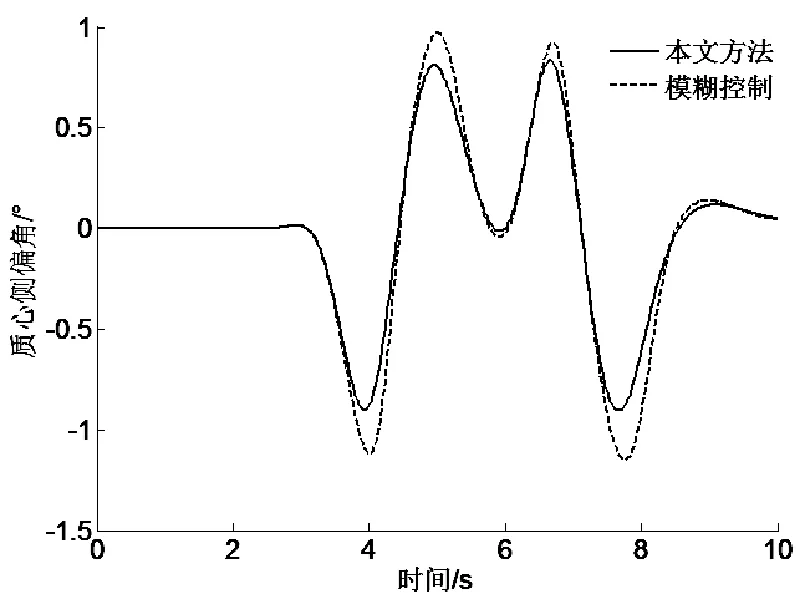
图13 质心侧偏角响应仿真结果
图14为分别加入粒子群优化模糊控制后的车辆路径跟随性响应仿真结果,由图可知,施加粒子群优化控制后,车辆与实际路径之间的横向偏移量较小,纵向偏移量处在允许范围内,同样能够较好的跟随设计路线,整个车辆的行驶避障能力得到了有效地提升,显著改善了车辆的操纵稳定性和行驶安全性。
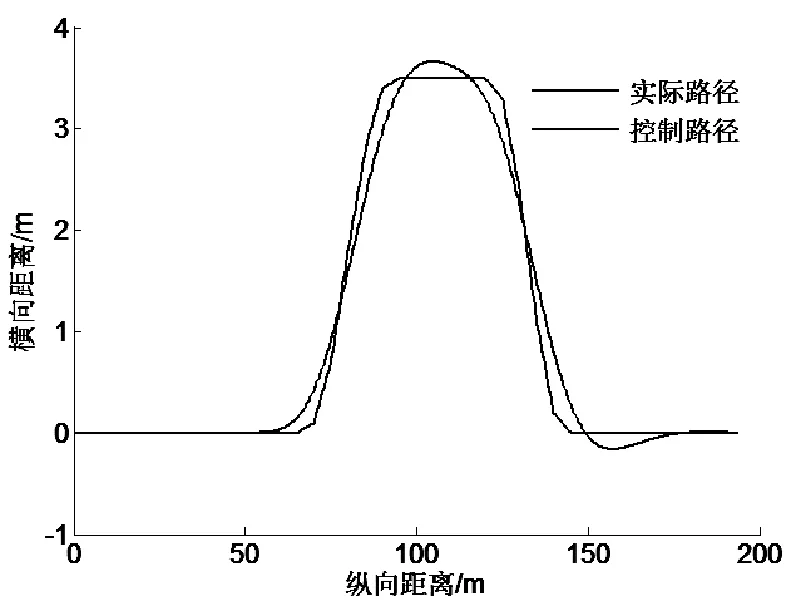
图14 路径跟随性响应仿真结果
5 结论
针对载货汽车机械转向系的特点,完成了载货汽车EPS系统的整体设计,建立了转向系模型、7自由度整车模型、轮胎模型和直流电动机模型,根据载货汽车转向系统实验制定了助力特性曲线,以直流电机电流作为控制目标,制定了粒子群优化模糊控制策略,基于MATLAB/Simulink软件平台建立载货汽车EPS系统仿真模型。仿真结果表明,与传统模糊控制相比,粒子群优化模糊控制能够取得更好的动态控制效果,
【下转第111页】
设计与应用
作者简介:杨意品(1973 -),女,副教授,硕士,研究方向为汽车动力转向系统。
基金项目:国家“十二五”科技支撑计划(2014BAK05B03)
收稿日期:2015-11-13
中图分类号:TP391
文献标识码:A
文章编号:1009-0134(2016)01-0092-05
