船体弯翘曲面行走系统静力学建模与实验分析
2016-03-18Staticsmodelingandexperimentalanalysisofwalkingsystemforthecurvedhull
Statics modeling and experimental analysis of walking system for the curved hull
陈 伟,李 飞,赵西振,李红军
CHEN Wei, LI Fei, ZHAO Xi-zhen, LI Hong-jun
(武汉纺织大学 机械工程与自动化学院,武汉 430073)
船体弯翘曲面行走系统静力学建模与实验分析
Statics modeling and experimental analysis of walking system for the curved hull
陈伟,李飞,赵西振,李红军
CHEN Wei, LI Fei, ZHAO Xi-zhen, LI Hong-jun
(武汉纺织大学 机械工程与自动化学院,武汉 430073)
摘 要:选用履带磁吸附方式作为在船体壁面运动的载体,通过分析履带上的吸附单元在弯翘壁面上的贴合状态,结合曲线拟合的方法,在该载体上加装两组被动弹性阻尼自适应机构,建立和验证该载体在船体弯翘曲面上的静力学吸附模型,分析吸附力与运动倾覆之间的关系,同时根据上述理论按一定比例设计制造出该行走系统进行带负载、船体壁面爬壁等实验,通过分析行走系统实际吸附状态与效率,船体壁面爬壁状态,验证理论分析的正确性。经实验,表明行走系统吸附力稳定,吸附单元的吸附效率较高,不仅能够在船体复杂曲面上运动,还能在船体弯翘曲面上运动,同时在船体壁面上运动时,自适应机构能有效地控制链条的吸附模块紧贴在壁面上运动,说明自适应机构有一定的曲面自适应能力,整个行走系统的设计是合理可靠的。
关键词:弯翘曲面;自适应机构;建模与分析;爬壁
0 引言
随着海洋经济的发展,现代船舶的船体外形具有流体动力学特性的曲面形貌,同时船舶在使用过程中,由于海水的强腐蚀性和海洋生物的强附着力,使得船体表面附着难以清除的贝类、锈斑[1],因此为了延长船舶的使用寿命及减少由于阻力增大造成的油耗损失,船舶必须定期进坞进行检修,但现在大多数喷漆、维修或者清理都是人工手持工具操作,不仅效率低下,而且成本昂贵且不易保证加工质量[2]。所以,研究、开发大型曲面高效自动化技术与设备,不仅具有明显的经济和社会效益,而且也是国防建设的需要。所以,基于崭新的技术思想开发既满足工程需求又符合经济需求的行走系统,以更新加工技术与装备、适应船体壁面表面处理的需求成为切实的要求[3]。
1 船体弯翘曲面行走系统建模
根据船体壁面面积大,各处曲率半径不一,造成船体壁面曲面形貌复杂,不利于在上面开展自动化作业。本节利用分段平面拟合曲面[4],将行走系统的悬挂机构做合理的改进,设计了一个被动弹性阻尼自适应机构,让履带能够尽可能的贴在船体壁面上,提高磁性材料的吸附效率,从而可以解决了载体在壁面上的适应性问题[5],本行走系统主要有三部分组成:驱动系统、吸附系统和自适应机构,如图1所示。
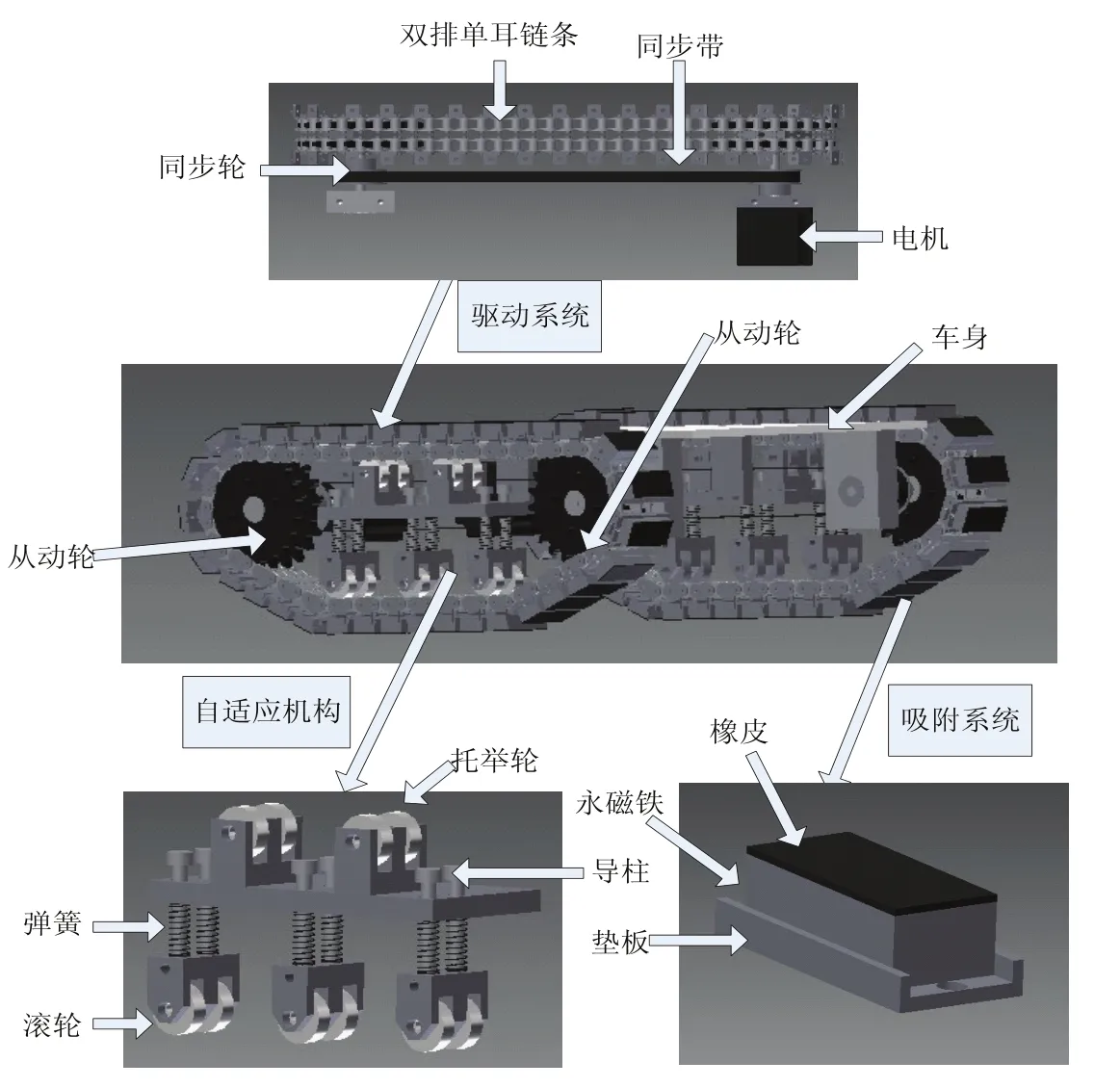
图1 基于Inventor建立的小型机器人行走系统虚拟样机
自适应机构的基本原理是在履带形成的封闭区间内加上一定数量的弹簧阻尼器,在阻尼器下方加上滚轮,因此就有别于传统的行走系统中的滚轮,滚轮会随着弹簧阻尼器的作用,使其一直贴在履带上,这样滚轮在履带内壁滚动的同时还能在垂直于运动方向上进行运动,所以就能保证履带能够一直贴在壁面行走,提高了行走系统的安全性能。
当弹簧阻尼器的个数n趋向于无穷大时,履带与凹壁面的的截面间隙面积为0,说明其完全贴附在凹壁面上,但在实际情况下,弹簧阻尼器的个数不可能为无穷多个,但是行走系统上建立一定数量的弹簧阻尼器,有助于履带贴附在壁面上[6]。本文的行走系统以两组弹簧阻尼器,每组3个对称安装在履带封闭的区间内,建立行走系统的自适应模型。
2 行走系统静力学分析
行走系统是在船体壁面上行走,其运动安全性和吸附可靠性是主要考虑的问题[7]。因此建立对行走系统在壁面上的静稳态分析可以为选取磁吸附尺寸,驱动力矩大小提供理论参考。上节中提到自适应机构主要是适应弯翘的曲面,如图2中结构示意简图所示,当吸附单元完全吸附在船体壁面上时,可将壁面上的曲线简化为直线拟合吸附,因为这样并不影响对行走系统的静稳态分析,同时还能简化吸附壁面的模型。
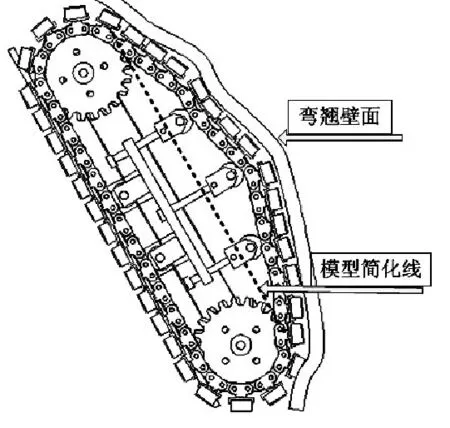
图2 行走系统适应弯翘曲面示意图
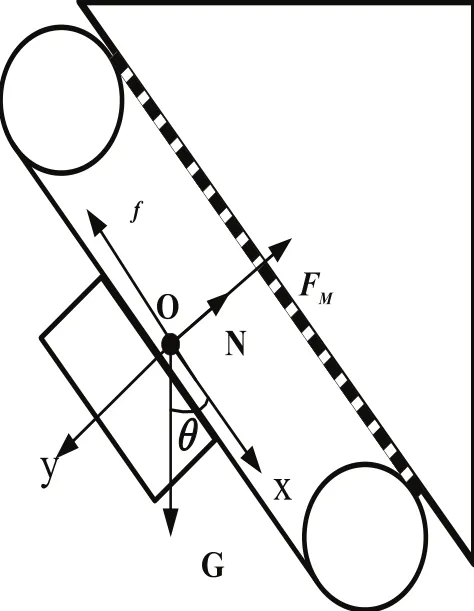
根据上述提到的方法,现将模型简化为如图3所示,建立如图3所示的坐标系,对行走系统进行静滑动分析,获得相应的受力分析方程。
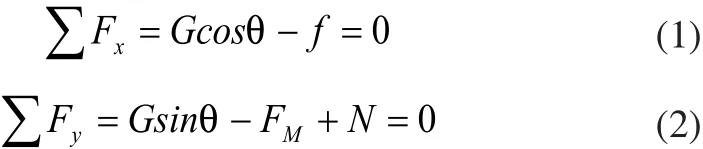
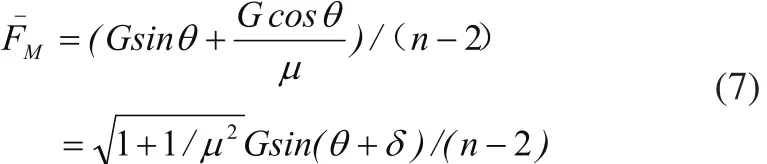
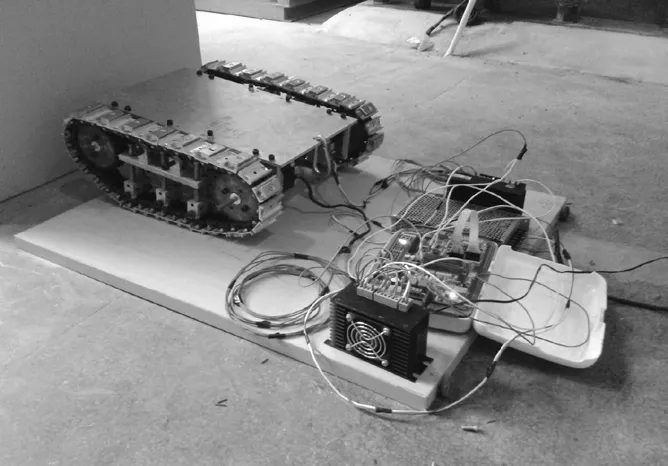
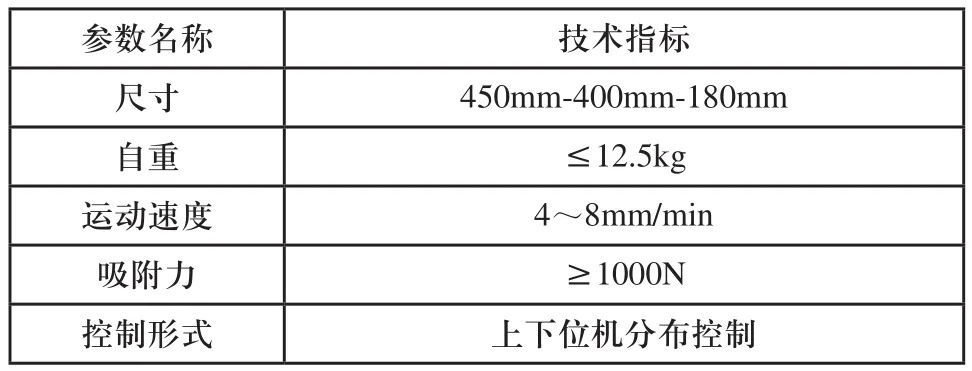
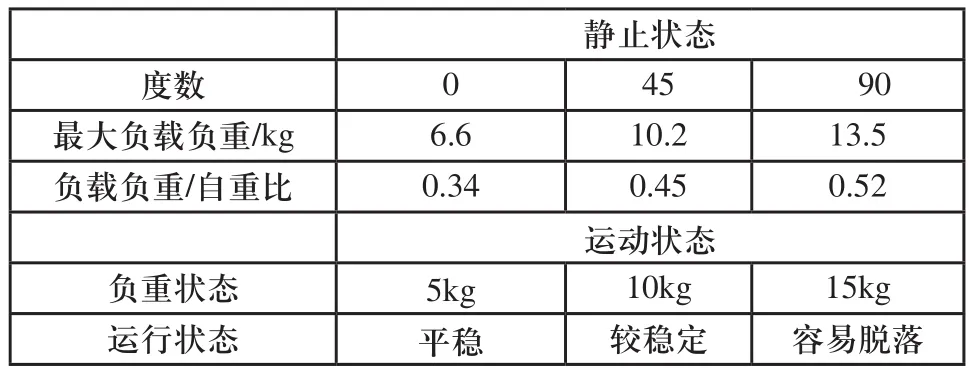
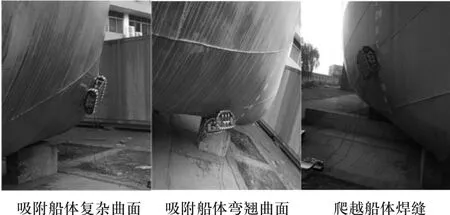
要是其不能从船体壁面坠落,所以Gcosθ 图3 行走系统壁面适应模型 联立式(1)~式(4)有: G表示机器人重量;f表示在壁面上滑动摩擦力;FM表示吸附单元总的吸附力;N表示壁面正压力大小;µ表示在壁面上的摩擦系数;Fi表示第i个吸附单元的吸附力;表示单个吸附单元所需的平均吸附力;θ表示壁面与水平线之间的夹角。 若单个永磁体提供的吸附力是稳定且相等的情况时,单个永磁体所需的最小吸附力为: 但是在实际运动过程中,靠近主、从动轮两端的永磁吸附单元所能提供的吸附力远远不足实际计算的吸附力,因此其保持绝对安全,单个吸附单元所需提供的吸附力为: 将式(6)通过和差化积计算得: 从式(8)可以看出,θ、µ数值都很小,单个吸附单元的吸附力主要取决与行走系统车身重量G,因此降低车身自重有助于小型机器人运动性能的提升,还能提高其安全性。另外,单个吸附单元施加的吸附力越大,其履带所受的拉力越大,当弹簧阻尼器伸长的长度越长时,其所受的拉力相对越小,当然的变化对履带拉力的影响相对于单个单元吸附力对履带的作用来说是相对较少的。 3.1 永磁吸附爬壁机器人参数 根据本文中理论设计制造出船体弯翘曲面行走系统样机一台,如图4所示,该行走系统后轮两驱驱动,设计运动速度为4~8mm/min,由于采用铝制材料,车身自重大约为12.5kg,建立基于VC++平台的MFC的上下位机分布控制,具体行走系统参数如表1所示,依据制造的行走系统分别对其进行了带负载实验以及弯翘曲面行走吸附实验。 图4 小型机器人行走系统样机 表1 小型机器人行走系统参数 3.2 负载实验 带负载能力是行走系统的重要特征,也是技术性能的要求。在保证行走系统安全性的前提下,提高行走系统的带负载能力,有利于为后期在行走系统上设计安装作业工具提供足够的空间,因此验证此行走系统的带负载能力是十分必要的。 当行走系统在实验平台上断电静止时,依次在行走系统尾部均匀增加悬挂物,直到其脱离处于临界脱离实验平台状态,测量悬挂物的重量,选取不同姿态状态重复测量,如图6所示;当行走系统在实验平台上通电行走时,在其尾部悬挂一定的重量,在实验壁面上行走,依次实现前进、后退、加速、减速等状态,逐步增加悬挂物的重量,观察行走系统的运动状态,重复多次测量相关状态,测试结果如表2所示。 图5 行走系统带负载实验 表2 行走系统带负载能力测试结果 3.3 船体弯翘壁面行走吸附实验 为了更好地模拟行走系统在船体弯翘曲面的运动情况,现将行走系统放在真实的船体弯翘壁面上进行运动试验,主要试验包括吸附实验、在弯翘曲面上行走以及爬越焊缝等,如图6所示。在实验过程中针对不同的曲率曲面分别进行行走状态分析,分析其吸附效果,同时通过调节行走系统的运动速度,来验证其吸附效率,同时通过爬越焊缝来验证自适应机构的合理性。 图6 行走系统船体弯翘壁面运动实验 本实验器材和场地得到武汉纺织大学工业自动化安全装备技术研究中心的支持。根据理论分析与试验显示,行走系统吸附力稳定,吸附单元的吸附效率较高,不仅能够在船体曲率较大的壁面上运动,还能在船体复杂的弯翘曲面上运动,同时在运动过程中,轻松爬越船 【下转第52页】 作者简介:陈伟(1987 -),男,湖北黄冈人,助理实验师,硕士,研究方向为机械设计与特种机器人。 基金项目:湖北省教育厅重点项目(D20141601) 收稿日期:2015-08-27 中图分类号:TH16;TH122;TP242 文献标识码:A 文章编号:1009-0134(2016)01-0046-03




3 船体弯翘曲面行走系统

4 结束语
