基于BP神经网络PID控制器在水产温室温度控制中的应用
2016-03-16于海南郑荣进步文月
于海南, 郑荣进, 步文月, 蒋 欢
(浙江大学生物系统工程与食品科学学院,浙江杭州 310029)
基于BP神经网络PID控制器在水产温室温度控制中的应用
于海南, 郑荣进, 步文月, 蒋 欢
(浙江大学生物系统工程与食品科学学院,浙江杭州 310029)
摘要针对水体大比热容性造成的水产温室水温变化非线性、大滞后性、时变性等问题,考虑到传统PID控制器自适应能力差、鲁棒性不强等缺陷,提出采用基于BP神经网络的PID控制策略。在该控制策略中,PID的控制参数可以通过神经网络进行实时调节,以实现最佳的控制效果。利用MATLAB软件对传统的PID控制策略和神经网络PID控制策略的控制效果进行仿真模拟。研究结果表明,基于BP神经网络PID控制的系统动态响应更快、鲁棒性更强、稳态精度更高、超调量更小,具有更好的控制效果。
关键词水产温室;PID控制;神经网络
Application of PID Controller Based on BP Neural Network in Temperature Control of Aquaculture Greenhouse
YU Hai-nan,ZHENG Rong-jin,BU Wen-yue et al (College of Biosystems Engineering and Food Science,Zhejiang University,Hangzhou,Zhejiang 310058)
AbstractAiming at non-linearity,large delay and time variant of aquaculture greenhouse due to high specific heat capacity of water,considering that the traditional PID controller has poor adaptive ability and robustness,a PID control strategy based on BP neural network was proposed.In this controller,the PID control parameter can be tuned real-timely by neural network to achieve the best control effect.The traditional PID control strategy and PID control strategy based on BP neural network were simulated by using MATLAB.The results showed that the neural network based PID control strategy has quick dynamic response,small overshoot,strong robustness and better control effect.
Key wordsAquaculture greenhouse; PID control; Neural network
在水产养殖行业中,养殖水的温度一直与鱼类的生长状况和产量息息相关。在实际养殖过程中,水温一般都会控制在设定的范围内以满足鱼类产量的最大化和能耗的最优化。近年来,温室养殖由于其保温性能好,已逐渐取代露天养殖,无论是在高温的夏季还是严寒的冬季,都表现出较好的综合效果。然而进入冬季,水产温室却面临一个大问题,由于水体自身的大比热容、大滞后性、大时变性等特点,往往造成水温难以调控[1]。
国内外的学者在温度控制策略方面做了大量研究,但基本上集中在植物温室。植物温室的被控量是温室内空气温度,由于空气的比热容较小,所以在短时间内,通过相应的控制策略很容易将气温控制在要求范围内。由于空气和水体比热容的巨大差异,植物温室可以应用的控制策略在水产养殖温室中往往不合适,难以满足控制要求。
传统的对水温控制的方法是采取PID控制,这种方法相对简单但却有一个局限性,若被控系统的参数是时变的,控制效果会受到显著影响,控制会出现较大滞后。尤其在水产温室的控制中,由于水体的大比热容,传统的PID控制已不再适用。笔者所采用的神经网络[2]具有自适应性和自学习能力,可以实现对控制参数的在线实时调节,达到满意的控制程度。
1温室温度控制系统数学模型
在冬季,加热水产养殖温室的热量来源主要是太阳辐射和外部热源,热量损失主要发生在温室的塑料薄膜与外界空气的对流换热、水体与土壤的热传递等过程中。在建模过程中,做了如下简化:温室内地面面积占温室总面积的5%左右,因此忽略池壁和道路对温室热环境的影响;忽略水池内生物的代谢产热;外膜、内膜、室内空气、水体和土壤等各向同性;忽略温室两端墙体室内的传热影响;忽略内外膜温度改变引起的热量蓄积;土壤层内只存在垂直方向上的一维传导传热,不考虑土壤含水量的改变引起热量传递。
以水产温室水体为研究对象,建立热平衡方程[3]:

(1)
式中,Cw为水的比热容[J/(kg·℃)];M为水体质量(kg);qsw为水体吸收太阳热辐射的热量(W);qh为热水锅炉供给水体的热量(W);qwo为水体通过围护结构散失的热量(W);qws为水体通过土壤散失的热量(W)。
平衡式中各表达式的具体形式如下:
(2)
式中,τsc为塑料薄膜对太阳辐射的透过率;ρsw为水体对太阳辐射的反射率;Aw为水体的面积(m2);S为太阳辐射强度(W/m2)。
qh=CwQwΔT
(3)
式中,Qw为热水锅炉的蒸发量(kg/h);ΔT为锅炉出水温差(℃)。
(4)
R=(1/αn+R0+Rl+1/αw)/Aw
(5)
式中,TO为温室外空气温度(℃);R为温室水体通过围护结构向外传热的热阻(℃/W);αn为内膜内表面与温室内空气的对流换热系数[W/(m2·℃)];αw为外膜外表面与室外空气的对流换热系数[W/(m2·℃)];R0为内外薄膜间的空气热阻[(m2·℃)/W];Rl为温室内空气热阻[(m2·℃)/W]。
(6)
式中,ks为土壤的导热系数[W/(m·℃)];ls为温度视为恒定值的土壤所在的深度(m);Ts为土壤温度(℃)。
将各式带入平衡方程,有:

(7)
令:
(8)

(9)
(10)
(11)
(12)
于是有:
(13)
式(13)为水产温室水体的动态微分方程式,式中Ti为输入信号,Sf、Tof、Tsf为外界环境的扰动。若设输入信号是时间的常数,在零初始的条件下,对式(13)进行拉氏变换,可得:
(Ts+1)Tw(s)=K[Ti(s)+Sf(s)+Tof(s)+Tsf(s)]
(14)
于是可得水体温度的传递函数:
(15)
由于水产养殖温室是一个大延迟、大滞后对象,故引入延迟环节,式(15)写为:
(16)
2神经网络PID控制系统设计
2.1基于BP神经网络的PID整定原理PID控制[4]效果好坏的关键在于自身的比例、积分、微分3个参数的调整,这3个参数之间要相互配合和制约,然而这种关系不一定是简单的“线性组合”,所以利用传统的方法找出这一关系难度很大,同时又不十分准确,控制结果不理想。神经网络具有任意非线性的表达能力,可以通过对系统性能的学习来实现具有最佳组合的PID控制。
BP(Back Propagation)神经网络[5]是1986年由Rumelhart和McCelland为首的科学家小组提出,是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络。BP网络具有能学习和存储大量的输入-输出模式映射关系,而无需事先揭示描述这种映射关系的特点。它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阀值,使网络的误差平方和最小。BP神经网络模型拓扑结构包括输入层、隐含层和输出层。结构一般如图1所示[6]。
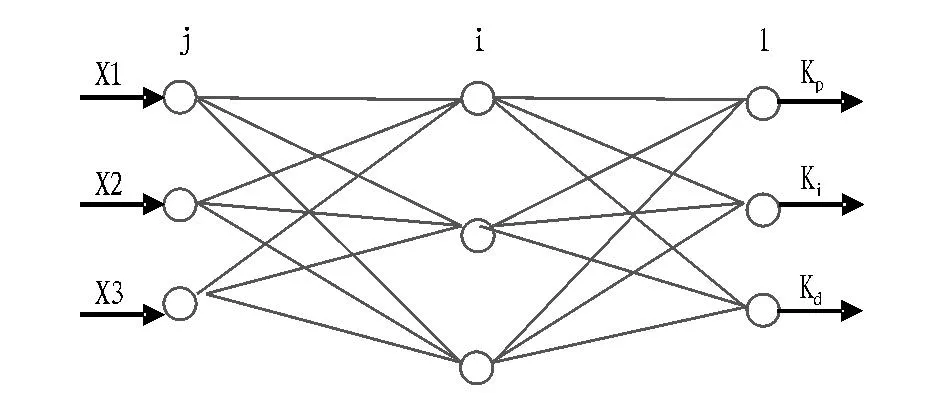
注:Kp、Ki、Kd分别为比例、积分、微分系数。Note:Kp、Ki、Kd and proportion,integral,differential coefficient,respectively.图1 BP神经网络框图Fig.1 BP neural network diagram
网络输入层的输入为:
(17)
式中,输入变量的个数M取决于被控系统的复杂程度;上角标1代表输入层。
网络隐含层的输入、输出为:
(18)
(19)

为隐含层加权系数;上角标2代表隐含层。
隐含层神经元的活化函数取正负对称的Sigmoid函数:
(20)
网络输出层的输入输出为:
(21)
(22)
(23)
输出层神经元的活化函数取非负的Sigmoid函数:
(24)
取性能指标函数:
(rin(k)-yout(k))2
(25)
按照梯度下降法修正网络的权系数,即按E(k)对加权系数的负梯度方向搜索调整,并附加使搜索快速收敛的全局极小的惯性项。
(26)
式中,η为学习速率;α为惯性系数;上角标3代表输出层。
2.2BP-PID控制系统的设计BP-PID控制器[6]可以克服常规PID控制器的不足,在常规PID的基础上利用BP神经网络的自适应、自学习能力进行控制参数的在线整定,其结构如图2所示。
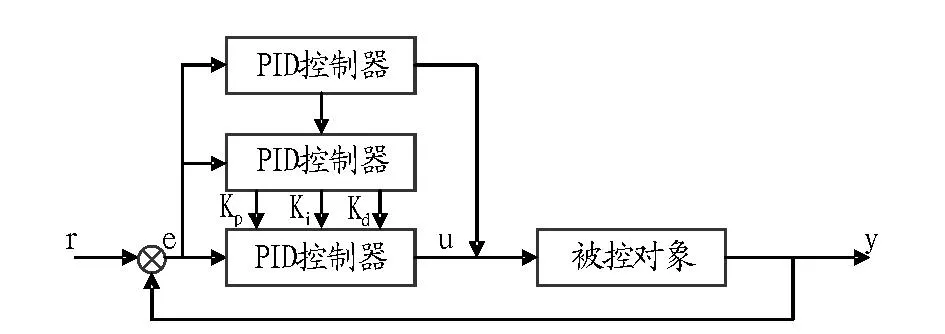
图2 BPNN-PID控制器结构框图Fig.2 BPNN-PID controller structure
传统PID控制器为线性控制器,根据给定值r(k)与被控对象实际输出值y(k)构成的偏差e(k)进行控制。
e(k)=r(k)-y(k)
控制器输出u(k):
将偏差的比例、积分、微分通过线性组合构成控制量,对被控对象进行控制。传统增量式数字PID的控制算法为:
Δu(k)=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)
-2e(k-1)+e(k-2)]
式中,Kp、Ki、Kd分别为比例、积分、微分系数,3个系数可视为依赖于系统运行状态的可调整系数。
BP神经网络PID控制是将PID控制规律融入神经网络之中的新型控制器。该研究中的BP神经网络PID控制采用3层网格,结构为4-5-3,学习速率为0.1,惯性系数为0.01,层与层之间的初始权值取[-0.5,0.5]上的随机数,输入层的输入信号为输入值r(k)、输出值y(k)、误差值e(k)和单位1。参数自整定过程如下[7]:①采样得到rin(k)和yout(k),计算该时刻误差error(k)=rin(k)-yout(k)。②计算神经网络NN各层神经元的输入、输出,NN输出层的输出即为PID控制的3个可调参数。③计算PID控制器的输出u(k),进行神经网络学习,在线调整加权系数,实现PID参数的自适应调整。
3温室温度控制系统仿真结果
该研究选取的仿真对象为杭州某地的一个大型的水产养殖温室。温室长宽为107m×50m,温室脊高3.82m,室内有8个22m×22m、圆角为5m的养殖池,8个水池分成了2排,2排水池之间的间距为3.50m。该温室覆盖了厚度为0.001m的双层聚氯乙烯塑料薄膜,两层薄膜之间距离为0.55m,土壤层的厚度取为1.00m。
将相关的温室参数代入前面的函数表达式,可得其传递函数的相应参数:T=3 562.35,K=1;同时引入滞后时间τ=80s,则传递函数为:
(27)
为了评价传统PID控制器和神经网络PID控制器的性能,对2种控制器的控制效果进行了仿真,结合相应控制指标对仿真结果进行评价[8-9]。传统PID控制器的控制参数采用稳定边界法[10]进行整定,神经网络PID利用其自适应性、自学习性进行参数的实时在线整定。2种控制系统的仿真结果如图3~6所示。

图3 PID和BPNN-PID单位阶跃响应曲线Fig.3 PID and BPNN-PID response curve tracing step signal
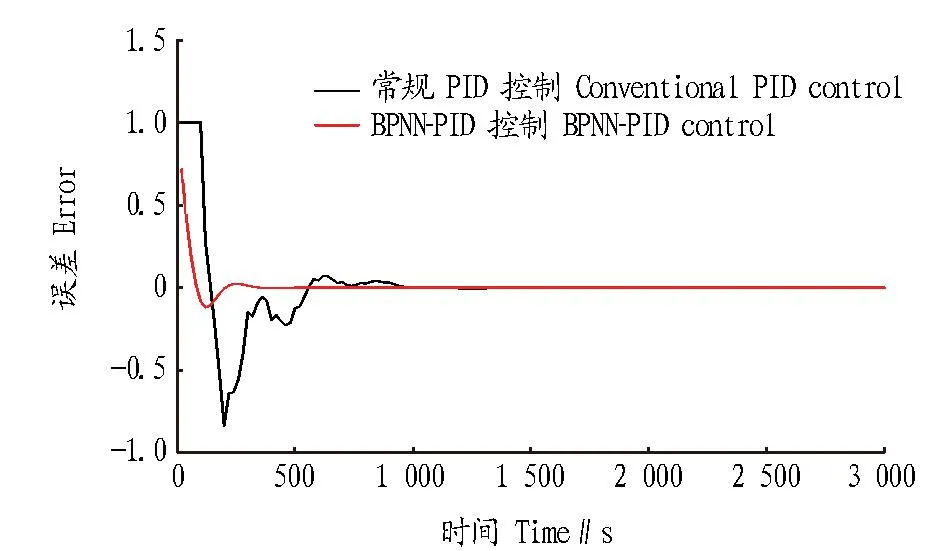
图4 PID和BPNN-PID控制的残差曲线Fig.4 The error curve of PID and BPNN-PID control
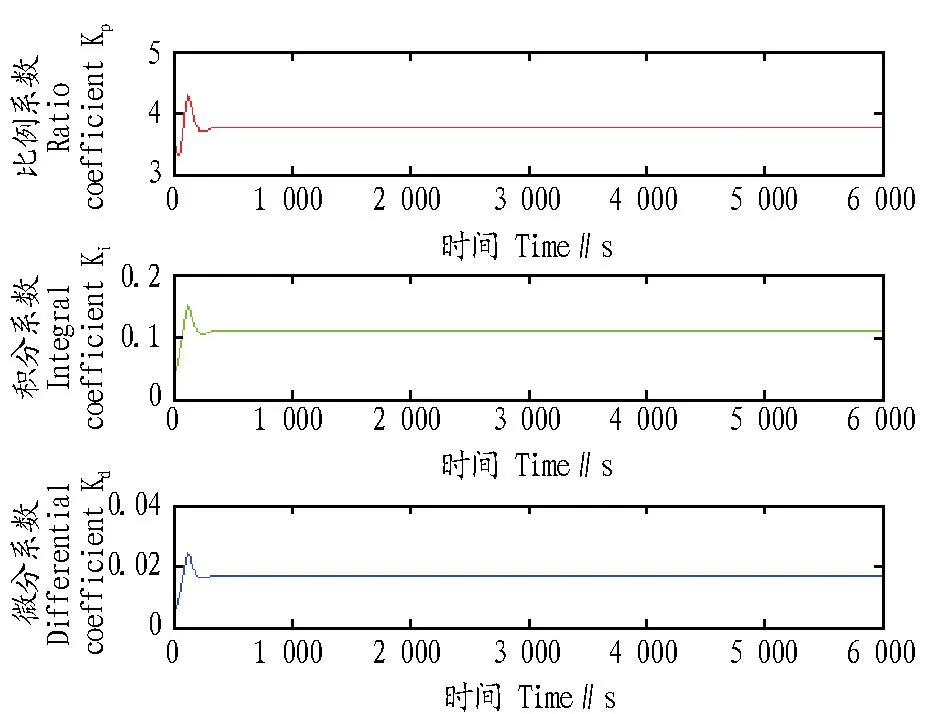
图5 BPNN-PID控制器参数变化曲线Fig.5 Controller parameter variation curve of BPNN-PID
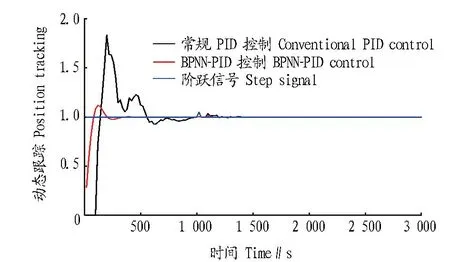
图6 PID和BPNN-PID受到外界扰动的阶跃响应曲线Fig.6 PID and BPNN-PID stimulation curves when confronting external disturbance
从图3和表1可以看出,基于BP神经网络的PID控制的超调量比常规PID控制小的多,BPNN-PID控制的超调量为18%,不会引起系统很大的波动,而常规PID的超调量为80%,系统波动较剧烈。过渡时间也比常规PID小很多,BPNN-PID控制的过渡时间为400 s,常规PID的过渡时间为1 000 s,可以看出BPNN-PID控制能很快达到稳定状态。衰减率比常规PID小很多,控制比较平稳。2种控制方法都几乎没有静差,控制效果可以满足控制要求。
常规PID控制和BP神经网络PID控制的误差曲线如图4所示。基于BP神经网络的PID控制明显比常规PID控制稳定,波动很小,达到稳定的时间也明显比常规PID控制要短,具有更好的控制效果。
基于BP神经网络的PID控制具有自学习、自适应性,在线调整PID控制系数的优点,其参数调整结果如图5所示。可以看到,BP神经网络PID控制可以实现控制参数在线调节,以保证最优的控制效果。
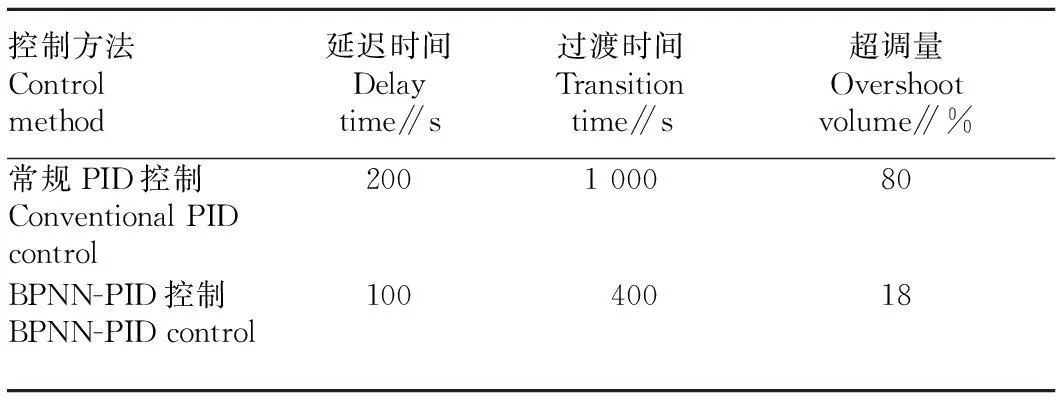
表1 过渡过程的性能指标比较
图6表明,在1 000 s系统受到外界扰动,基于BP神经网络的PID控制的表现明显优于常规PID控制。在受到外界扰动后,BP神经网络PID控制的系统的波动明显比常规PID控制小很多,而且回到稳定状态的时间也比常规PID控制短很多,BPNN-PID大概需要200 s而常规PID则需要500 s。基于神经网络PID控制的鲁棒性更强,具有更强的抗干扰能力,能够对一些不确定的干扰有及时的控制作用,自适应能力较强。
4结论
水产养殖温室控制系统是一个大延迟、大惯性、大时变性和非线性的被控对象,相比于民用建筑和植物温室更难调控,传统PID控制系统难以保证控制品质。该研究将BP神经网络和经典增量式PID控制器相结合,利用BP神经网络超强的自学习性和非线性逼近特性,设计了BP神经网络PID控制器,使得PID控制器的控制参数能够实现在线调整,达到满意的控制品质。
通过对比传统PID控制和BP神经网络PID控制的仿真结果可得,BP神经网络整定的PID具有较好的控制效果,其动态过程超调量及过渡时间均较常规控制效果理想,具有结构简单、稳态精度高、过渡时间短、抗干扰能力强、鲁棒性好、自适应能力强等特点,弥补了常规PID控制在温室温度控制中参数难以整定及控制效果不理想的缺点,将此应用于水产温室具有一定的推广价值。
参考文献
[1] 朱芳,朱松明,叶章颖,等.密闭遮光型甲鱼温室热环境模拟与试验[J].农业工程学报,2014,30(10):182-192.
[2] HE F N,MA C W.Modeling greenhouse air humidity by means of artificial neural network and principal component analysis[J].Computers and electronics in agriculture,2010,71(1):19-23.
[3] LI S H,DANIEL H W,CRAIG L B,et al.Thermal modeling of greenhouse aquaculture raceway systems[J].Aquacultural engineering,2009,41(1):1-13.
[4] GURBAN E H,ANDREESCU G D.Comparison of modified smith predictor and PID controller tuned by genetic algorithms for greenhouse climate control[C]//IEEE 9th international symposium on applied computatuional intelligence and informatics.At timisoara,romania:SACI,,2014:79-83.
[5] 屈毅,宁铎,赖展翅,等.温室温度控制系统的神经网络PID控制[J].农业工程学报,2011,27(2):307-311.
[6] AFOU Y E,BELKOURA L,QUTANOUTE M,et al.Feedback techniques using PID and PI intelligent for greenhouse temperature[J].International journal of advanced research in electrical,electronics and instrumentation engineering,2014,3(6):9779-9792.
[7] 安大伟,王江江,娄承芝.神经网络PID控制器在高大空间恒温空调系统中的应用[J].天津大学学报,2005,28(3):268-273.
[8] FOURATI F,CHTOUROU M.A greenhouse control with feed-forward and recurrent neural networks[J].Simulation modelling practice and theory,2007,15(8):1016-1028.
[9] GURBAN E H,ANDREESCU G D.Comparison study of PID controller tuning for greenhouse climate with feedback-feedforward linearization and decoupling[C]//16th International conferenceon.At Sinaia,Romania:ICSTCC,2012:1-6.
[10] 白金,韩俊伟.基于MATLAB/Simulink 环境下的PID参数整定[J].哈尔滨商业大学学报,2007,23(6):673-676.
收稿日期2015-12-24
作者简介于海南(1988- ),男,黑龙江齐齐哈尔人,硕士,从事农业建筑节能研究。
基金项目浙江省重点科技创新团队资助项目(2011R50029)。
中图分类号S 625
文献标识码A
文章编号0517-6611(2016)03-312-04
