一款DSC控制的数字电源实现
2016-03-12湘潭大学物理与光电工程学院
湘潭大学物理与光电工程学院 申 培
湖南进芯电子科技有限公司 黄嵩人
湘潭大学物理与光电工程学院 谭 伟
一款DSC控制的数字电源实现
湘潭大学物理与光电工程学院 申 培
湖南进芯电子科技有限公司 黄嵩人
湘潭大学物理与光电工程学院 谭 伟
数字化技术随着低成本、高性能控制芯片的出现而快速发展,同时也推动着开关电源向数字控制发展。文章利用一款新型数字信号控制器(DSC)ADP32,完成了基于DSC的数字电源应用研究,本文提供了DC/DC变换器的完整数字控制解决方案,数字PID补偿技术,精确时序的同步整流技术,以及PWM控制信号的产生等,最后用一台200W样机验证了数字控制的系统性能。
数字信号控制器;同步整流;PID控制;数字控制
1 引言
随着半导体行业的快速发展,低成本、高性能的DSC控制器不断出现,基于DSC控制的数字电源越来越备受关注,目前“绿色能源”、“能源之心”等概念的提出,数字控制的模块电源具有高效率、高功率密度等诸多优点,逐渐成为电源技术的研究热点。
数字电源(digital power supply)是一种以数字信号处理器(DSP)或微控制器(MCU)为核心,将数字电源驱动器、PWM控制器等作为控制对象,能实现控制、管理、监测功能的电源产品。具有可以在一个标准化的硬件平台上,通过更新软件满足不同的需求[1]。ADP32是一款集实时处理(DSP)与控制(MCU)外设功能与一体的数字信号控制器,不但可以简化电路设计,还能快速有效实现各种复杂的控制算法。
2 数字电源系统设计
2.1 数字电源硬件框图
主功率回路是双管正激DC/DC变换器,其控制方式为脉冲宽度调制(PWM),主要由功率管Q1/Q2、续流二极管D1/D2、高频变压器、输出同步整流器、LC滤波器组成。
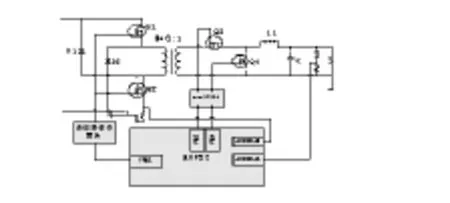
图1 系统硬件结构图
2.2 电流控制模式
在基于ADP32的DC/DC应用中,采用峰值电流控制模式,数字控制器的ADC模块采样输出电压与电压基准比较得到的电压差通过外环电压环 PID控制,得到一个电流基准再与采样MOS管电流相比较得到电流差用于电流环PID校正。最后电流环返回值就是功率开关管的PWM信号占空比D,通过改变占空比的大小来稳定输出电压[2]。
3 数字补偿技术
3.1 S域建模
数字电源的主功率回路和模拟电源一样,完成输入电压的隔离变换;而信号反馈回路实现了数字化,用DSC控制器芯片完成电压反馈信号的数字化处理和数字脉宽调制输出(DPWM)[3]。构建S域系统的框图模型,将电源整个闭环回路分为几个主要部分:功率级电路Gp(s)、信号调理和ADC采样Gad(s)、数字补偿器Gc(s)、电流环传递函数G2(s)整体框图如图2所示。

图2 控制环路传递函数系统框图
其中根据电路的小信号模型如下:

电流环传递函数为:

电压反馈传递函数为:

未补偿前的环路增益为:



将各式带入可求得:

在MATLAB中分析为补偿前H(s)环路特性:
sys=tf([3.68e-5 0.568],[3.73e-8 8.48e-5 1]);
bode(sys);
grid on;
sisotool(sys)
得到为补偿前的BODE图,根据自动控制理论,选取交越频率为开关频率的1/5~1/10,需要充足的相位裕量以避免发生震荡,其中最佳相位裕量为低相位裕量将导致欠阻尼的系统响应,较高的相位裕量则导致过阻尼的系统响应。从图3知不满足环路稳定条件。
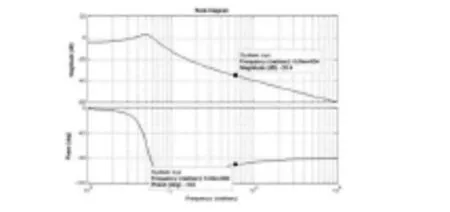
图3 开环伯德图
应用“SISOTOOL”工具栏可以方便配置补偿器的零极点和增益,加入PID补偿器实现两大目标:一个是提高系统开环穿越频率,即带宽,这决定了系统的动态响应速度;另一个目标是增大系统的相位裕度,相位裕度决定系统动态响应幅度[4]。从图4的补偿BODE图可知,开环传递函数的穿越频率61.5Khz,相位裕度为60度,较好地实现了补偿的目的。最后确定的补偿器的传递函数为:

校正后的BODE如图4所示:
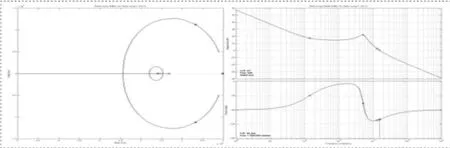
图4 带补偿器的开环伯德图
3.2 Tustin变换
用MATLAB中c2d函数实现Tustin变换,得:
数字补偿器= c2d(sys,0.00001,'tustin')

数字补偿器以差分方程的形式可以写成:
U(n)=1.853U(n-1)-0.853(n-2)+11.24E(n)-21.08E(n-1)+9.838E(n-2)
其中,U为补偿器输出的控制电压,E为误差电压。n=当前采样,n-1=前一次采样,得到的差分方程即数字补偿器的控制算法,通过ADP32中的程序实现。
4 同步整流技术
4.1 同步整流原理
同步整流技术(Synchronous Rectification)是指用导通电阻较低的MOSFET来替代整流二极管,从而达到降低整流损耗、提高效率的目的[2]。功率MOSFET属于电压型器件,它在导通时的伏安特性呈线性关系,同步的意思就是栅极电压必须与被整流电压的相位保持同步。
4.2 SR选型及时序
选用IR公司的IRF3207整流管,其中通态电阻RDS=3.3,VDSS=75V。为避免次级整流管与续流管同时导通,在PWM3与PWM4驱动时序上必须设定一定的死区时间,参照IRF3207手册,其中:

根据整流管器件的延迟时间,设定死区时间为0.42us。
4.3 SR驱动波形
根据DSC中设计的一个专门死区单元,只要配置死区定时器预定标因子得到死区定时器的时钟,最后配置死区定时器的周期m[3],就能得到死区时间为0.42us互补的PWM(3.3v)波形。经由ucc27324驱动电路。
4.4 DSC控制实现
软件主要包括Main函数、ADC中断、PID控制子程序,主程序完成ADC、PWM、定时器、PID等模块初始化,然后等待ADC中断的到来,检测到中断信号就进入相应的流程。程序流程如图5所示:
本设计中,配置DSC的高速外设时钟HSPCLK为75Mhz,定时器输入时钟预定标因子TPS=0,得到定时器T1,T2的时钟TCLK=HSPCLK/2°=75Mhz,工作于连续增/减计数模式,设置T1PR=0x007D产生频率为300Khz的载波频率[5],使能比较单元,配置CMPR1/CMPR2的值产生PWM1、PWM3、PWM4信号驱动MOS管。
数字PID运算在ADC中断调用运行,输出的与PWM占空比对应关系:

Vm为PWM斜坡电压的AD值,F_PWM为寄存器T1PR的值,Avm为每一位AD值对应的PWM脉冲数。
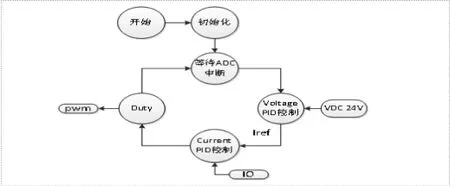
图5 程序流程图
5 实验结果
本文在基于ADP32的平台上搭载了一台200W的数字电源模块样机,参数如下:1)电压输入范围:380~410(前级PFC输出)2)输出电压:DC24V;3)输出电流:8A(MAX);4)输出功率:200W (MAX);5)开关频率:300Khz;6)效率:~92%。
用示波器观测MOS管栅极的驱动波形。

图6 MOS管G极驱动波形
图6左为功率管Q1/Q2栅极的驱动波形,频率300K,幅度为12.0V,此时的占空比约为0.37。
图6右为SR管Q3/Q4栅极的驱动波形,死区时间为0.42us。
6 结论
数字控制已成为电力电子研究领域的重要方向,基于DSC的控制技术在电力电子领域逐渐普及。本文采用DSC数字控制双管正激拓扑,研究了数字PID补偿算法,结合同步整流技术提高效率,而且还对DC/DC变换器的系统软件设计、带死区PWM产生策略等,最后用一台200W实验样机验证了设计正确性。
[1]陈新,Charlie Wu,W.Hutching等.基于DSC控制的数字功率因数校正模块应用[J].电工技术学报,2006,21(12):99-104.
[2]Huang Bo.The Research of Digital and Analog Control for 60W Switches Forward Power Supply [D].Hangzhou Dianzi University, 2012:46-54(in Chinese).
[3]王斌,黄健明,等.数字DC/DC开关电源环路补偿器设计[J].计算机工程与应用,2010,46(34):70-73.
[4]曹艺,陈晓飞,等.用于DC/DC变换器的数字控制器的研究与设计[D].华中科技大学,2010:45-74.
[5]顾卫钢,等.手把手教你学DSP-基于TMS320X281X[M].北京航空航天大学出版社.
申培(1990—),男,湖南邵阳人,硕士在读,基于DSC控制的数字电源研究。
黄嵩人(1972—),男,博士,研究员,研究方向:DSP芯片架构设计。
谭伟(1990—),男,湖南益阳人,硕士在读,基于DSC控制的数字电源研究。