四旋翼自主飞行器设计
2016-03-12湖南文理学院物理与电子科学学院汪大理王先春
湖南文理学院物理与电子科学学院 汪大理 王先春
四旋翼自主飞行器设计
湖南文理学院物理与电子科学学院 汪大理 王先春
本文设计了一款四旋翼自主飞行器,主要设计了四旋翼自主飞行器的硬件控制电路和软件系统,构建了由MPU6050三轴陀螺仪、三轴加速度计和三轴磁力计组成的姿态测量系统,给出了姿态解算的具体步骤。软件系统设计中使用了互补滤波器对陀螺测量误差进行矫正,采用基于欧拉角反馈的PID 控制器进行姿态控制,不需要建立复杂的控制系统模型。该飞行器体积较小,可以垂直起飞和降落,适用范围广,使用灵活。
四旋翼;陀螺仪;姿态控制
引言
无人飞行器(UAV)自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,例如:侦察与营救任务,科学数据收集,地质、林业勘探,农业病虫害防治,以及视频监控,影视制作等。通过无人飞行器来完成上述任务可以大大降低成本和提高人员安全保障。
1.四旋翼飞行器结构与控制原理
1.1 结构形式
四旋翼飞行器的结构根据电机的布局不同可分为十字型模式和X型模式。十字型模式四旋翼飞行器飞行姿态控制更容易,但飞行动作灵活性要稍差。X型模式四旋翼飞行器姿态更复杂,但飞行动作更灵活。
1.2 控制原理
四旋翼飞行器的动作主要通过四个电机的转速差来控制,基本控制原理:电机1和3顺时针旋转驱动两个正桨产生升力,电机2和4逆时针旋转驱动两个反桨产生升力。反向旋转的两组电机和桨使其各自对机身产生的转矩相互抵消,保证4个电机转速相同时机身不发生转动[2]。电机1和4转速减小,同时电机2和3转速增大,产生向前方向的运动。电机1和4转速增大,同时电机2和3转速增减小,产生向后方向的运动。电机1和2转速减小,同时电机3和4转速增大,产生向左方向的运动。电机1和2转速增大,同时电机3和4转速减小,产生向右方向的运动。4个电机转速同时增大产生向上的运动。4个电机转速同时减小产生向上向下的运动。对角线的电机一组转速增大,另一组转速减小产生自身旋转运动。
2.硬件系统设计
本系统主控芯片采用STM32RC微控制器,它采用高性能、低成本、低功耗ARM Cortex-M3内核[2]。时钟频率达到72MHz,具有64个引脚,功能强大。姿态控制系统采用MPU6050传感器,内部集成了加速度传感器和角速度传感器,并辅以三轴磁力计,从而实现精确地采集四旋翼飞行器的实时姿态。高度控制采用超声波传感器,可以精确地测量四旋翼飞行器的高度,从而实现对四旋翼飞行器飞行高度的控制。该系统还设计了无线蓝牙遥控系统,通过无线蓝牙模块可以很方便的向四旋翼飞行器写入遥控命令。
2.1 系统构成框图2.2 主控板电路
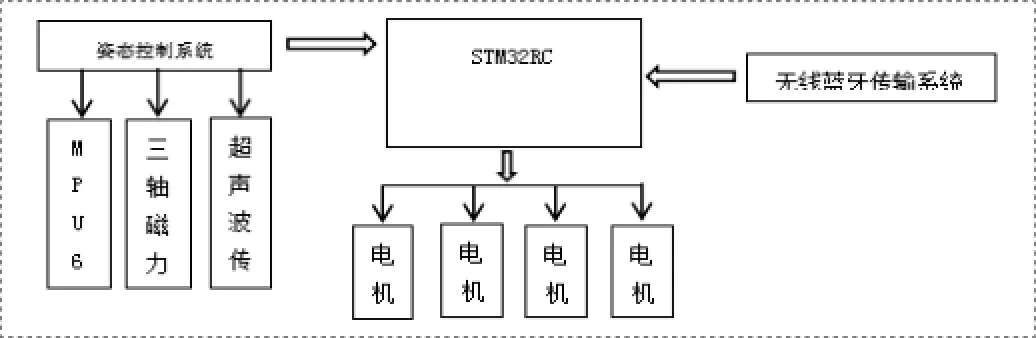
图1 系统框图
基于资金和性价比考虑,设计方案中选择STM32F103RC 单片机作为飞控系统的主控芯片。STM32F系列属于中低端的32位ARM微控制器,该系列芯片是意法半导体(ST)公司出品,其内核是Cortex-M3。而STM32F103RC拥有512K FLASH 以及72M主频,芯片集成定时器,CAN,ADC,SPI,I2C,USB,UART,等多种功能,有64个IO口,能够满足四旋翼自主飞行器的所有需求。
2.3 MPU6050及HMC5883L姿态采集电路
MPU6050内部集成了三轴陀螺仪三轴加速度计,它们与HMC5883L三轴磁力计组成姿态测量系统,主控制器将姿态测量系统的数据进行解算得到当前姿态。
MPU-6050为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。MPU-6050整合了3轴陀螺仪、3轴加速器,并含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,并为应用开发提供架构化的API。
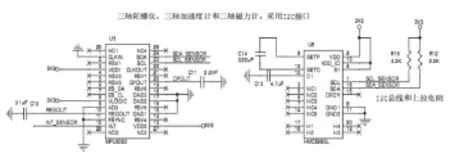
图2 姿态采集电路
2.4 电机驱动电路
本设计采用PWM控制直流电机的转速。微型四旋翼飞行器的动力系统由电机和旋翼组成。电机选用直接为7mm的空心杯电机。直流电机是功率器件,需要很大的驱动电流,控制器的驱动能力有限,因此必须选用专门的驱动芯片。本设计选用N沟道场效应管SI2302来控制和驱动直流电机,它具有较大的漏极电流,最大能通过2.8A的电流。由于飞行器的电机在转动过程中会产生比较大的冲击电流,所以加二极管给电机的反电动势提供放电回路。下拉100K电阻防止上电时电机转动。
2.5 无线蓝牙传输模块
该模块采用美国TI公司CC2541芯片,配置256KB空间,采用蓝牙4.0协议。支持AT指令,用户可根据需要更改串口波特率,设备名称,配对密码等参数。该模块支持UART接口,有成本低、体积小、功耗低、收发灵敏等优点,只需配备少许的外围元件就能实现其强大功能,可以实现110米的传输距离,使用方便灵活。故本设计采用该模块作为四旋翼自制飞行器的无线指令传输系统。
2.6 超声波传感器模块
该模块的测量高度可达十米,测量精度可达3mm,可以满足四旋翼飞行器高度测量的需求。模块包括超声波发射器,接收器与控制电路。基本工作原理:(1)采用IO口TRIG触发测距,给至少10us的高电平信号;(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
3.软件系统设计
姿态数据的处理中采用四元素算法对姿态数据进行处理,得到四旋翼飞行器的实时状态,根据实时状态并采用PID算法控制相应的电机改变转速,从而实现对四旋翼飞行器飞行姿态的精确控制。
3.1 姿态控制程序设计
四旋翼微型飞行器的控制目标是使其在无动作指令时保持稳定悬停状态,有动作指令时有效完成指定动作。PID 控制器结构简单,稳定性好,工作可靠,调整方便,在工业控制中被广泛使用[4]。本文使用PID控制器进行飞行器的姿态控制,无需对飞行器进行精确的数学建模[6]。以姿态欧拉角的期望值与计算值之差作为PID控制器的输入,每个电机的对应的PWM控制量都是三个PID控制器输出的叠加,叠加量的正负与电机位置相关。姿态控制与升力控制相结合,使飞行器能够完成三维空间的各种运动[4]。
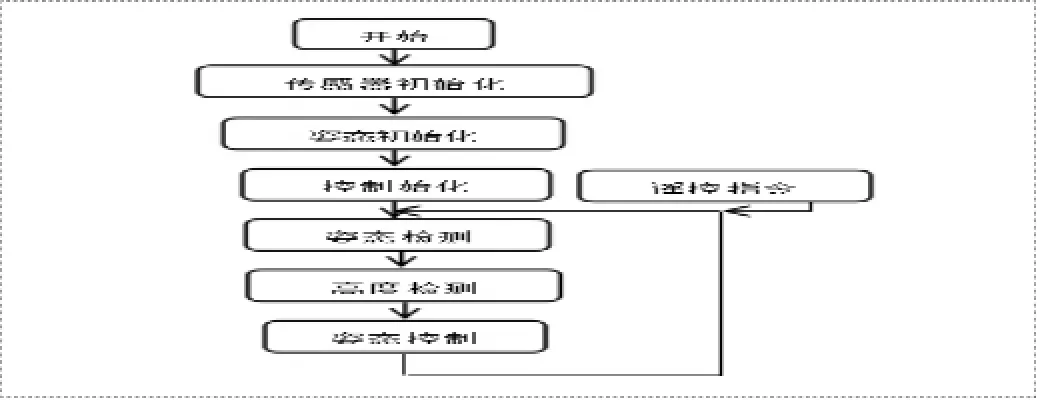
图3 程序流程图
3.2 程序流程图
上电后四旋翼飞行器按程序正常启动,首先进行初始化,然后进入姿态测试、高度测试和姿态控制,当有遥控指令介入时,执行遥控指令(见图3)。
4.结论
本文设计了一种小型四旋翼自主飞行器,介绍了四旋翼飞行器的工作原理,对构成四旋翼飞行器相关的硬件系统及软件进行了说明。使用了互补滤波器对MPU6050测量误差进行矫正,对四旋翼飞行器姿态解算的过程进行了解叙,提出了确定互补滤波器融合系数的方法,简单介绍了PID姿态控制器的原理。该小型四旋翼自主飞行器具有体积小,重量轻,结构紧凑等优点,具有自主垂直起降和自主悬停能力,在有效负载范围内可扩展视觉传感器或其他辅助定位装置,实现自动避障以及自主导航,可适用于侦查巡逻拍摄等多种任务。
[1]李尧.四旋翼飞行器控制系统设计[D].辽宁:大连理工大学, 2013.
[2]程敏.四旋翼飞行器控制系统构建及控制方法的研究[D].辽宁:大连理工大学,2012.
[3]王小莉.面向桥梁检测的四旋翼飞行器控制系统研究[D].重庆:重庆交通大学,2013.
[4]杨晓岚.PID算法在智能车中的应用[J].实验科学与技术, 2010(04).
[5]王冬来,吕强,刘峰.小型四轴飞行器动力学参数测定方法设计[J].科技导报.2011,36:42-45.
[6]杨锦.数字PID 控制中的积分饱和问题[J].华电技术,2008,30(6):64-67.
王先春。
国家自然科学基金青年项目(41304098);湖南省光电信息技术校企合作创新创业教育基地资助项目(湘教通〔2016〕394号);湖南文理学院教研项目 (JGYB1314)。
