如何应对列车控制系统革新?
2016-03-11HideoNakamura
Hideo Nakamura
如何应对列车控制系统革新?
Hideo Nakamura
Department of Computer Engineering, College of Science and Technology, Nihon University, Funabashi, Chiba 274-8501, Japan
a r t i c l e i n f o
Article history:
Received 30 June 2016
Revised form 19 August 2016
Accepted 5 September 2016
Available online 21 September 2016
列车控制系统
铁路信号
基于无线通信的列车自动控制系统
列车自动防护系统
闭塞系统
列车控制系统的作用是确保铁路的安全。本文首先总结了日本、欧洲通用的列车控制系统,在此基础上,笔者根据现有列车控制系统,提出以下问题:应该采用什么方法来提高列车控制系统的功能性、安全性和可靠性,并协助铁路的商业运营?其次,笔者提出了一个有助于基于当前信息和通信技术对新型列车控制系统进行开发的理想架构;同时,还提出了一种新的统一列车控制系统(UTCS),它能有效地提高列车控制系统的鲁棒性和竞争力。UTCS的最终架构仅由基本设备组成,如铁轨中的转辙机和铁路道口控制设备。最后讨论了UTCS在应用中的处理方式。
© 2016 THE AUTHORS. Published by Elsevier LTD on behalf of Chinese Academy of Engineering and Higher Education Press Limited Company. This is an open access article under the CC BY-NC-ND license
(http://creativecommons.org/licenses/by-nc-nd/4.0/).
1.引言
至今为止,许多不同类型的列车控制系统已经被开发出来并投入使用。虽然这些系统是按照不同国家和铁路线的要求所设计发明,而且在某种程度上受限于当时的技术程度,但它们都具有共同的基本架构。更具体地说,这些系统是由基本的模块部件所构成的,包括控制站间列车间行进空间的闭塞系统,控制单轨道交通方向的闭塞系统,属于闭塞系统的列车自动防护(ATP)系统,以及用于执行站内路线控制的联锁装置。
系统的差异性取决于它们如何对列车进行检测以及如何实现ATP。从仅仅具有自动报警系统(AWS)的低级安全系统,到最先进的无线电列车控制系统[基于无线通信的列车自动控制(CBTC)系统],它们都装配有相同的联锁装置,用于负责列车站内行进的路线控制和安全保证。
列车控制系统在经历长期的不断革新和改进之后,当前的系统已经构成了由许多硬件设备和子系统组成的稳定系统。剩下的关键问题是:应采用什么方法来提高列车控制系统的功能性、安全性和可靠性,并协助铁路的商业运营?笔者并没有刻意坚持传统的架构,而是基于当前已有的信息和通信技术,花大量的时间来构思有助于开发新型列车控制系统的理想架构。在所有的理想架构中,提出了一种新的统一列车控制系统(UTCS)。此系统将所有安全装置用来确保列车运行线的安全,以便通过中心的公共处理器的统一处理来通知列车的可用线路。UTCS的背景故事和优势如下。
2.日本列车控制系统的发展
在日本的ATP系统中,列车自动停止(ATS)系统与列车自动控制(ATC)系统不同。前者中,驾驶员的制动操作享有优先权,以便危险情况发生时,列车可以被强制停止。而后者中,制动操作本身就是自动的,它通过系统控制来防止因驾驶员疏忽所造成的列车事故。本文通过对日本和欧美ATP系统的演变历程进行详细调查和比较,以确保新提出的UTCS系统满足所有设计要求。
2.1. 从自动报警系统(AWS)到列车自动停止(ATS)系统
ATS系统的早期原型是AWS系统,AWS系统被用于向驾驶员提示停车信号以预防制动器处理方面的疏忽。1962年的三河岛列车相撞事件是由于驾驶员违规操作而造成的大规模事故。驾驶员不仅没有按照信号灯提示停车,而且列车还撞破安全隔离带,最后脱轨,从而造成相邻线路的阻塞和160人的伤亡。为预防此类事故,开发出了ATS系统。该系统利用地面的停止信号来提示列车,列车接到信号后,会通过警报声(铃)来引起驾驶员的注意,驾驶员需要在5 s内进行响应确认操作,否则列车会采取自动紧急制动,紧急制动与已经发出的警报声无关。这种S型ATS系统设备可以认为是从AWS系统的基础上开发出来的、功能最少的备份设备。日本国家铁路公司(JNR)决定在所有铁路线上安装这种S型ATS系统,并于1966年全部安装完成。虽然这种装置大大减少了事故的数量,但ATS远非一套完美的系统,因为它仍然不能防止在确认操作之后,由于制动器延迟等引起的事故(注意,“确认操作”是指将制动手柄转换到制动位置,并且按下确认按钮。) 。
2.2. 交通运输部的指令以及私营铁路的高级ATS系统
在JNR报道所有铁路线路都已安装S型ATS系统一年后,即1967年1月,日本交通运输部(目前为国土交通省)发出通知(政府第十一号公告),要求公共部门和私营部门的所有铁路公司安装新的ATS系统。与已经安装的S型ATS系统不同的是,这款新的ATS系统能够提供列车速度检测功能。在该公告的影响下,ATS系统得到了进一步的发展,具体表现在驾驶员只要符合正规操作就不会有警报响起,同时,只有当测速功能提示存在危险时,制动系统才会启动。
为了响应交通运输部的公告,公共部门和私营部门的铁路公司根据自身的情况,开发并引进了ATS系统。公共部门和私营部门所使用的典型的ATS测速方法如下[1]:
(1)根据计算列车通过放置在地面上的两个接地线圈所花费的时间,来测算列车速度。
(2)根据接地线圈的信息,选择连续测速模式,用来连续检查列车速度,直到列车停止。
(3)将相当于被测速度的调制信号发送到轨道电路,并根据列车速度进行对比检测。
(4)根据被测速度,轨道电路电流瞬间中断一段时间,用来检测列车运行速度。
2.3. 可传送列车性能的ATS系统
在JNR的S型ATS系统备受在确认操作后因驾驶员的人为失误所导致的事故困扰的同时,为了响应交通运输部的公告,公共部门和私营部门铁路公司研发了各种ATS系统。数据表明这些ATS系统并没有出现严重事故,显示出了它们良好的效果。在这种历史背景下,20世纪70年代初,JNR开始研究如何实现在功能上和私营铁路公司使用的系统一样有效的ATS 系统。然而,最困难的任务是研发一种可以普遍适用于非单一列车运行的铁路线的ATS系统,因为从限制坐席和停车站的特快列车到货运列车,列车的制动性能差别很大,并且不同制动性能的列车会同时在铁路线上高密度地运行。相反,在公共部门和私营部门的铁路线中,运行的列车的制动性能几乎相同,即使以同一速度来检测和控制不同列车也不会引起重大问题。
JNR为了解决这一难题,研发出能应对同一铁路线上检测和控制不同制动性能列车的ATS系统。新的系统提供了列车到停止信号之间的距离信息,而不是从地面上进行速度控制。这在当时是一个创新,因为基于地面距离信息的速度检测模式考虑了列车的制动性能。这种系统被命名为P型ATS系统。
由于P型ATS系统可以根据制动性能产生速度检测模式,不仅可以为每个列车实现最合理的速度检测,而且可以避免不必要的制动。此外,P型ATS系统使用能够双向发送多项数据的应答器。双向应答器的使用使得P 型ATS系统能够实现如下三项功能:
(1)响应停止信号执行防护;
(2)根据速度控制点,给列车提示相关信息来进行控制;
(3)使用列车的通过/停止信息进行详细的铁路道口交叉控制。
此外, P型ATS系统中使用的概念(就是将地面控制信息,譬如行驶限速地点信息存储在列车上,通过对存储在列车上的数据进行计算,来执行高效的列车控制),极大地影响了后续的列车控制系统,如数字ATC系统。数字ATC系统和P型ATS系统的另一个优点是不需要升级就可以应用到速度显著提高的列车上。
UTCS开发中的一个关键因素是,什么信息应该被传送到列车数据系统中。 UTCS系统应该在P型ATS系统和数字ATC系统相结合所带来的技术优势的基础上,充分地发挥列车性能。
2.4. 列车自动控制(ATC)技术的出现和发展
ATS系统很大程度上依赖于驾驶员根据警报信号来操作列车,并且在危险情况下使用制动器。但在地铁和新干线火车上,难以安装检测地面信号的设备。ATC系统在这种情况下应运而生,使得制动系统的控制完全机械化和自动化,不再依赖于驾驶员的判断和操作。第一个ATC系统采用的方法是用车载天线接收通过轨道的速度信号(ATC信号),然后车载ATC设备通过实际速度与速度信号的值来自动控制制动器,将车速调节到指定速度。因此,ATC系统通过机器主导控制车速来规避人为失误操作带来的安全问题。
ATC系统中,列车驾驶室显示屏上显示的是ATC限速信号,而不再是传达轨道旁侧标志的信号。ATC也被安装在难以看到标志信号的地铁区间以及传统的高密度铁路线中,并且都表现出了极高的安全性。然而,因为该方法需根据ATC信号强制执行速度检测,所以它的不足之处在于需新增信号进行加速。这样所导致的结果是,在列车完全停止之前,由于制动器的重复被制动和释放,会降低乘客的乘坐舒适度。
通过应用P型ATS系统的控制思想,给出通过给定地段停车信号点信息来取代从地面发送用于安全控制的速度信号,提供了解决上述问题的可行方法。如果根据列车的制动性能等其他因素,并且考虑列车到停车点的距离,就可以产生一个连续的单一速度检测模式。因为数字电报被用来将信息从地面传输到列车,所以该系统后来就被称为数字ATC系统。
CBTC系统通过无线电波向列车发送控制电报,并从列车获取运行位置。该系统于2011年10月被引进到日本仙石线上,被称作高级列车管理和通信系统(ATACS),有着稳定的运行表现[2]。ATACS建立了一个具有铁路道口控制器的无线电闭环控制系统。通过确认铁路道口匝道已关闭且不存在其他障碍物后,控制器会发送通行信号允许列车通过。这个控制系统不仅增强了安全性,同时也使得闭环控制反应的时间缩短了10 s。考虑到UTCS的功能性,还有必要探讨有关关键技术如接口信息检测和铁路道口控制的智能解决方案。图1显示了ATP系统在日本的发展历程。
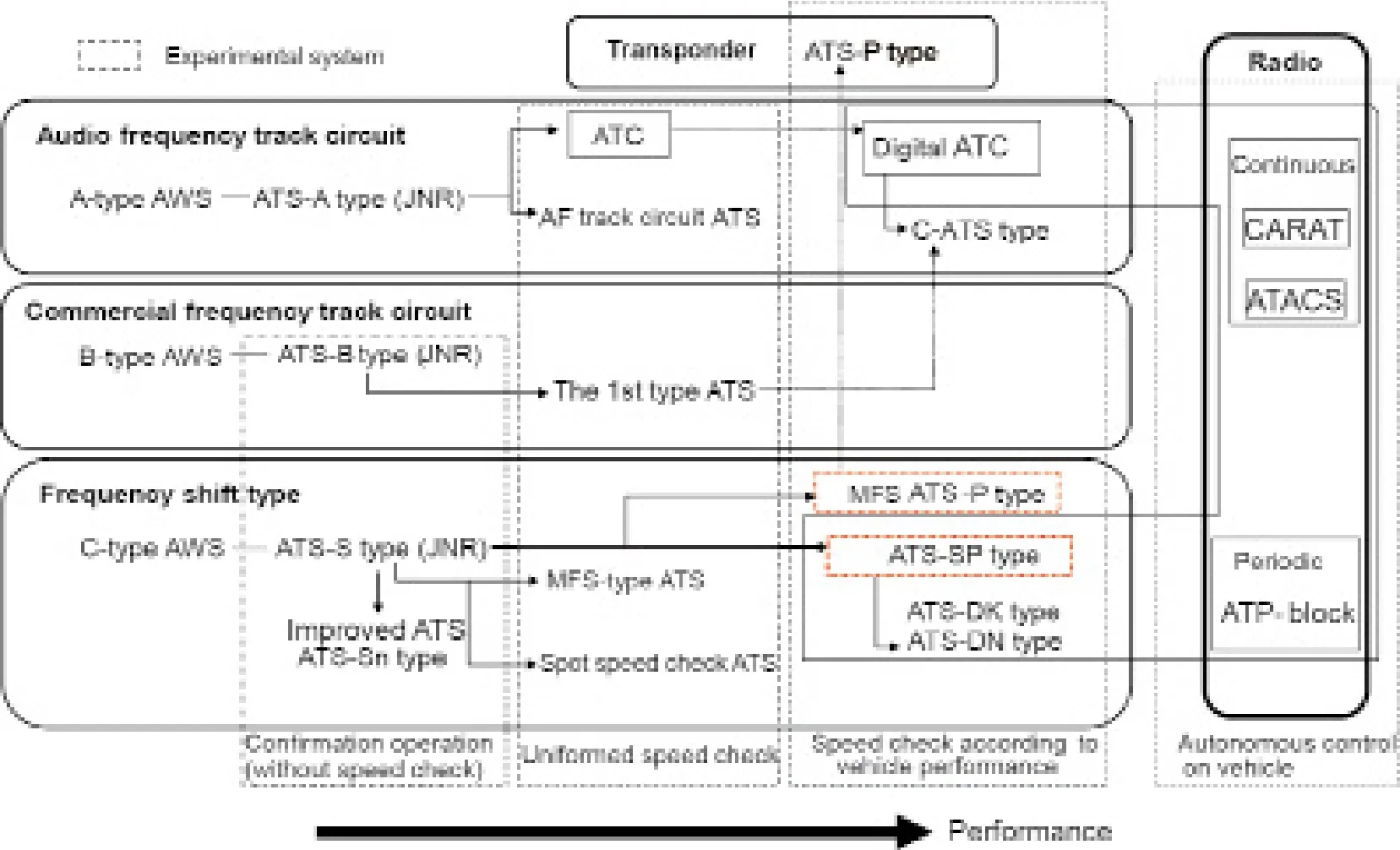
图1.日本列车自动防护(ATP)系统的发展。AF:音频;ATACS:高级列车管理和通信系统;ATC:列车自动控制;ATS:列车自动停止;AWS:自动报警系统;CARAT:计算机和无线电辅助列车控制系统;JNR:日本国家铁路公司;MFS:多频移。
2.5. 欧洲列车控制系统的特征
欧洲典型的列车控制系统包括法国TVM(transmission voie-machine)系统(TVM-300和TVM-400)、德国LZB(Linienzugbeeinflussung)系统和欧洲列车控制系统(ETCS)。虽然这些系统对于确保现代高速铁路的安全性至关重要,但是TVM-300、TVM-400和ETCS(级别1和2)这些系统的安全控制方法仍然基于常规轨道电路的列车位置检测信息。此外,TVM-300系统采用步进式速度检测,在此基础上研发的TVM-430采用平滑速度检测模式,单速度检测模式是用于速度检测的主流方法。平滑速度限制模式的速度检测也用于ETCS的自动列车防护。以上每个系统的特点见表1。
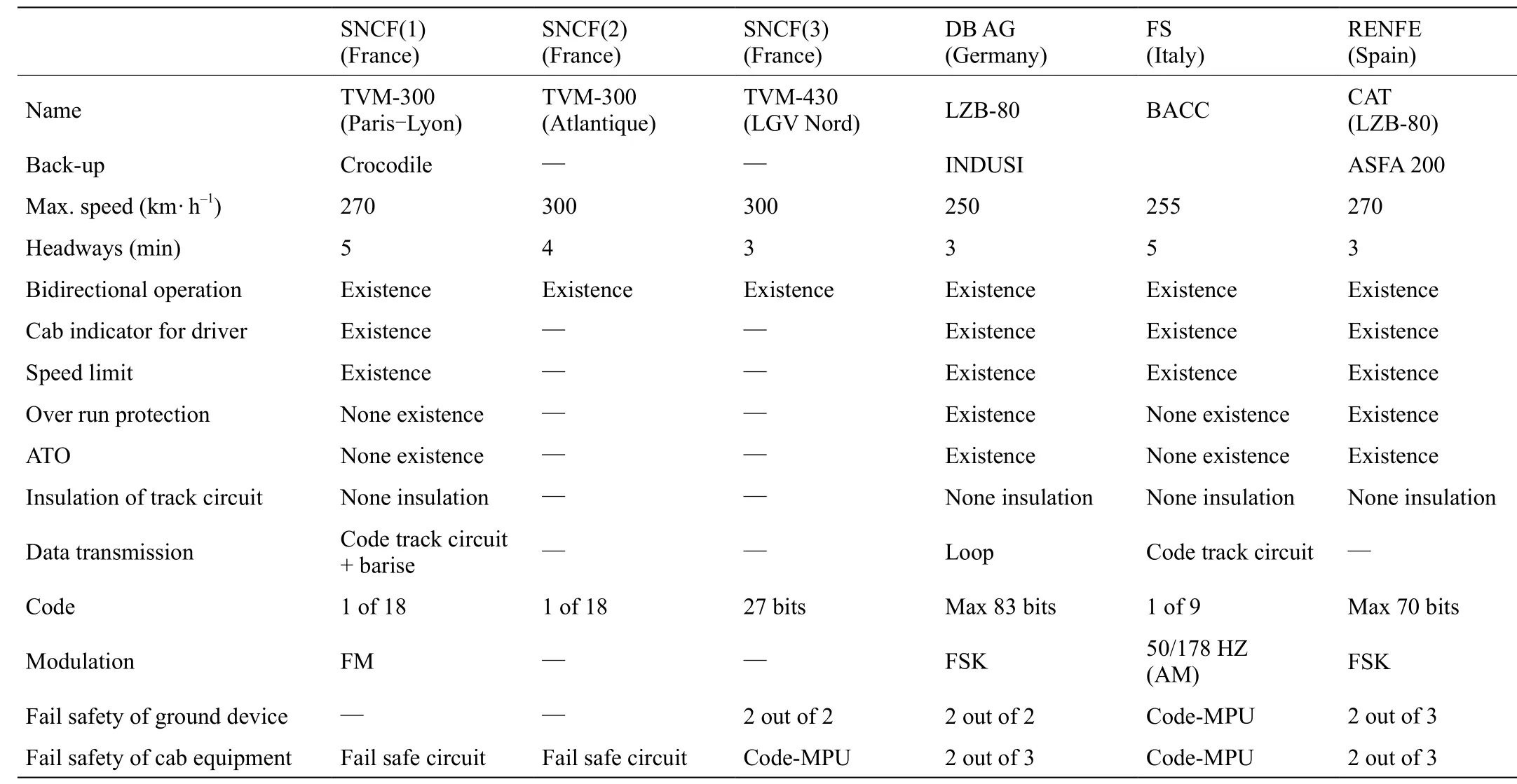
表1.洲典型ATP系统
然而,对于日本的数字ATC、ATACS等系统来说,它们将固定的铁路数据存储在列车上,比如弯道和坡道的速度限制、列车制动性能的数据等,以此在列车上产生一个合理的速度检测模式。相比之下,欧洲许多系统从地面接收诸如制动曲线等数据,使用车载逻辑来进行ATP控制。这是在考虑未来列车控制系统的形式时需要进一步研究的一个问题,包括车辆倾斜控制和安全数据收集。
3.统一列车控制系统(UTCS)的提案
3.1. UTCS提出的背景
列车控制系统的基本功能是闭塞功能和联锁功能。除了路线安排的作用,这两个功能最重要的任务是避免列车相撞以及列车追尾之类的事故。因此,如在前面部分中所讨论的,ATP的原理是基于排他性控制而构建的,目的是避免与另一辆列车发生碰撞。自从火车问世以来, ATP的各种机理都是通过积累每次事故的经验教训发展而来。ATP技术进步的历史代表了列车控制系统的整个发展过程,也显示了目前最先进的技术。换言之,复杂完整的闭塞系统和联锁设备,是通过自下而上的方式不断反复改进而发展的。
在诸多设备的开发中,包含很多通用的开发过程,这些通用过程会在许多单个设备的开发中得到迅速发展。而那些随着系统进步有一天终将被淘汰的技术流程也都会公之于众。此外,为了解决列车运行问题,包括防止发生铁路道口事故,一些系统应进行彻底的革新,来让铁路管理系统变得更加有效。在现有的信号系统中,虽然列车控制是通过信号、指示牌和指示器来实现的,但是列车操作本身还需要通过路线和闭塞信号的信息来执行,同时也要参考如限速等其他补充信息。其中,路线和闭塞信号的信息传递到列车的信息格式,与其他信号和ATC信号发送到列车的格式是相同的。因此,可以对这些信号标准化处理。笔者建议采用这种思维模式的UTCS系统。 UTCS不仅要处理路径分配,而且还要在分配路径时,控制转辙机以及各个铁路道口。
3.2. UTCS的体系架构
图2展示了UTCS的系统架构。UTCS是一种分层列车控制系统,它由位于中心的中央处理器(功能层)、位于地面的设备接口单元(终端层)以及用于前两层信息交互的传输单元(网络层)组成。在UTCS中,位于功能层的中央处理器主要用于协调整合联锁装置、闭塞系统和ATP装置等设备并进行逻辑处理。因此,就不再需要位于终端层的处理器了。另外,UTCS整合处理的结果是,多个设备中功能相似的部分也会被统一管理,如列车跟踪系统,这样在系统逻辑上就会得到简化。
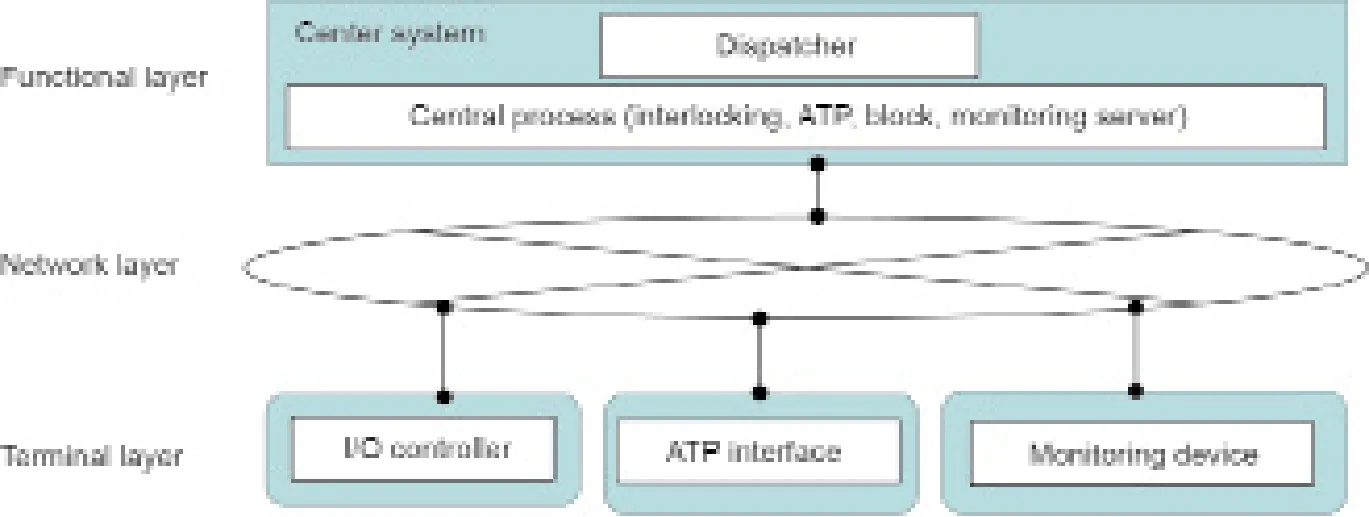
图2.统一列车控制系统(UTCS)的架构。
3.3. UTCS进程概述
在UTCS中,引入了“路径”(在图3中标为“Authorized route”)的概念,用来标准化设计列车行驶过程。路径是指“列车能够行驶的极限位置”,是根据转辙机、每辆列车所在的铁路道口以及前一辆列车的状态推导得出。为此,列车跟踪、路径搜索(或者路线搜索)以及路径搜索过程中的控制过程,实现了使用联合处理器管理列车行驶过程,进一步有效地控制了铁路道口和转辙机。
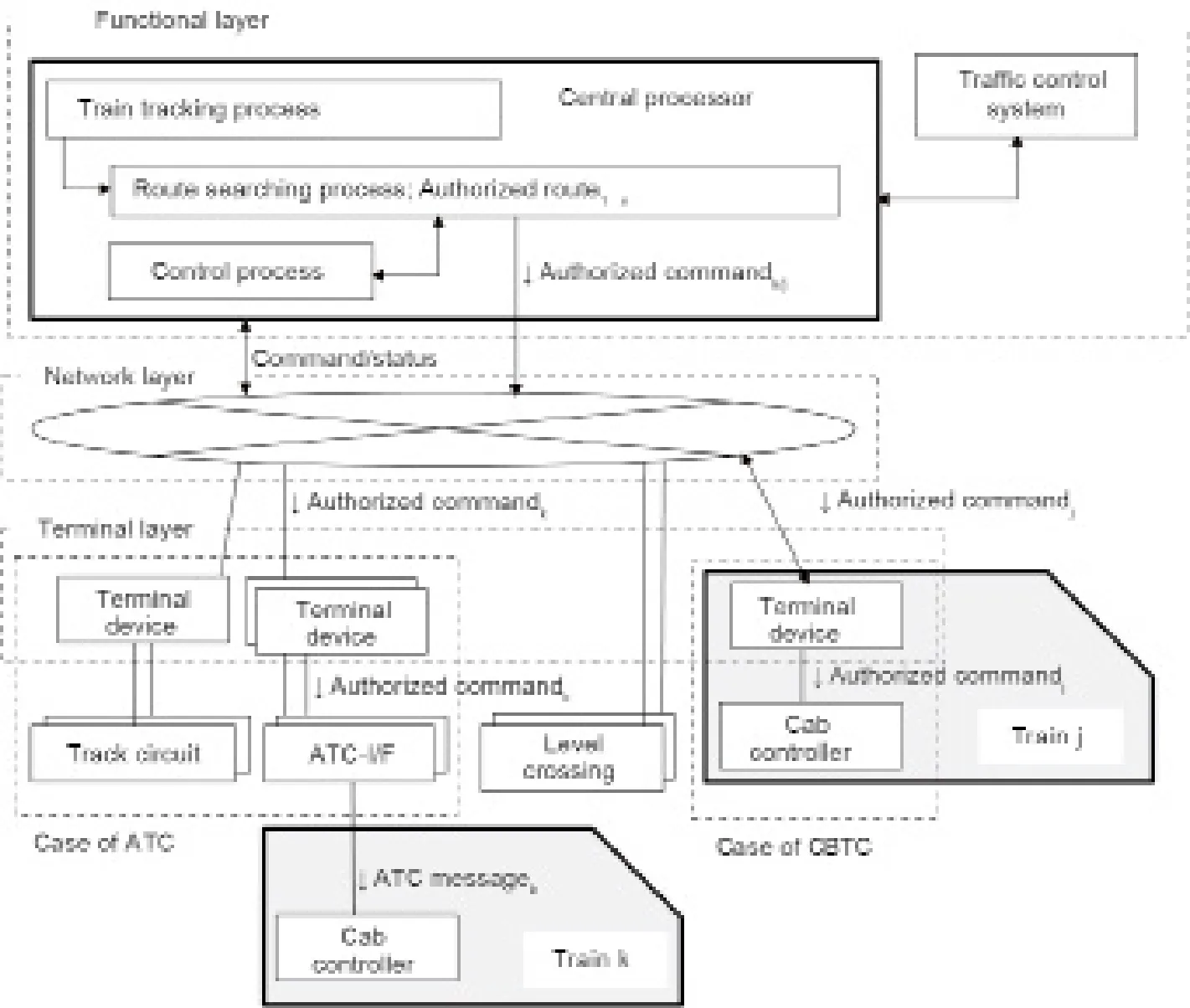
图3.UTCS流程概述。
一旦列车路径被确定(图3中的Train k和Train j),含有路径和相应的限速信息的指令(Authorized commandk/j)就会发送到对应终端层的终端设备上。
路径搜索是寻找在列车运行方向上可能到达的极限位置。然而,列车在车站内的情况下,路径的制定则要根据功能层上的行驶控制装置(或称为“交通控制系统”)的预定路线来搜索极限位置。此时的路径取决于行驶路径终点,而路径终点由位于前一辆列车尾部或者存在于两辆列车之间的转辙机的状态来决定(包括安全边界)。
另外一种情况,当列车位于车站间中途点时,前一列车的尾部或现有铁路道口的状态(在图3中标记为“Status”)将用来确定路径的方向。 如果铁路道口由相关列车控制,并且状态指示“通过”,那么就意味铁路道口匝道关闭且没有障碍物,搜索范围会延伸到下一个更远的位置。
尽管车载设备用于负责车载安全的检测和处理,但是基于某种模式的连续测速也同时在列车上得以实现。此外,在CBTC中,可以通过在列车上安装终端设备而不是在地面上提供ATP终端设备来实现高级测速功能。
4.互联网协议(IP)网络负责网络层
在实现UTCS的过程中,网络层扮演着重要的角色。IP网络被用作UTCS的网络。而IP网络的性能要求则取决于不同的铁路线。由于在高密度铁路区间中,需要快速且可靠性高的传输方式来保证信息传输时间,因此需要专门为列车控制系统设计一个以性能为中心的网络。而在低密度铁路区间中,信息传输要可靠性高且同时引入费用和维护成本不能太高,此时需要考虑以成本为中心的通用网络。此外,在含有高密度铁路区间和低密度铁路区间的铁路线中,不同的IP网络可以非常简单地连接起来。
4.1. 高密度铁路线的IP网络
用于高密度铁路线路的IP网络,通过光纤线路将列车控制的发送节点进行环路连接。然后,每个设备和传输节点经由以太网线路连接。该IP网络还可以保证发送节点之间的通信时间和短时间周期内的最长通信时间不大于中继时间的1/10。因此,每个设备可以实现和中继接口同等速度和更快的响应处理,而不考虑设备到设备之间的物理距离。
尽管IP网络基本上都是单独配置,但是可以冗余地配置两个或更多的IP网络,用来增强可用性。因为各个IP网络之间是完全独立的,构成并行双重配置,中央处理器和终端设备可以自由地选择通信的路由。又因为IP网络的可用性与系统可用性直接相关,所以还必须注意网络的可靠性。在信号局域网(LAN)技术成功应用在包括东海道新干线列车在内的许多系统之后,传输节点的硬件也正在研发中。
4.2. 地方铁路的IP网络
对于地方铁路部门来说,控制引入和维护IP 网络的成本十分重要。所以,如蜂窝电话线路之类的技术也可以用作IP网络。尽管蜂窝电话线路可以减少昂贵的电缆布线成本、设施成本和维护成本,但是通信时间难以保证,而且通信成本依然很高的问题也没有得到解决。
当在地方铁路中使用蜂窝电话线路时,连续通信就会变得困难。然而,即使在单个线路段中,某一点与中央处理器的信息交互被局限在相邻站台,仍然可以实现超过当前水平的列车控制系统。列车自动防护和闭塞(ATPB)系统的发展已经证实了这一点[3]。
5.UTCS充当高级系统
UTCS用简单的方式不仅可以低成本地实现CBTC,而且可以实现现有的信号系统,如数字ATC。因此,先通过UTCS暂时实现数字ATC,然后再切换到CBTC的高级策略变得可行。
5.1. 通过UTCS将数字ATC转变为CBTC
到目前为止,为了实现数字ATC,就必须在现场准备设备间,为设备间配备大型数字ATC地面设备,并通过网络连接设备间。为了之后能将数字ATC转变为CBTC,CBTC的逻辑单元需要被单独安装,而且车载设备之间需要通过无线电波进行信息交换。如果是这种情况,那么大多数数字ATC地面设备(包括机房中的逻辑单元)和互锁设备(包括数字ATC的接口)都会被淘汰。
另外,考虑到未来向CBTC过渡的设计,有必要对具有模式化的安全控制处理功能的车载设备进行标准化。换句话说,这种车载设备通常用于处理数据,无论是接收器收到的ATC电报,还是车载无线电设备收到的电报。
相反,在UTCS中,列车的行驶指令是由中央处理器通过统一处理产生的。如果要在UTCS下实现数字ATC,那么ATC终端单元应该根据中央处理器发出的列车行驶指令来放大ATC电报,将这些电报传送到各个轨道电路上,并执行列车位置检测。
为了能在这些条件下,在未来将数字ATC转变到CBTC,接入IP网络的无线电单元将通过安装在列车上的终端设备与车载设备进行通信,并且可以从功能层收发运行命令和列车位置信息。因此,除了ATC终端单元之外,其他即将淘汰的终端单元还包括每个轨道电路的放大器(AMP)和列车检测(TD)。
5.2. 引入UTCS系统的效果
UTCS可以减少大量设施,这不仅可以降低列车控制系统所需的设备成本和运行成本,而且还可以提高可维护性、可靠性和安全性。对于逻辑单元的集成而言,随着功能改变和功能增加的时间变化,革新都是基于中央处理器的。因此,可以很容易地将列车控制系统改变为可灵活地适应不断变化和需求的自我升级的系统。尽管可以将目前的信号防护装置的控制配置放在UTCS系统中,但是在列车上安装终端设备,使转变为CBTC系统更加容易。
由UTCS实现的CBTC,线路旁边没有基点控制装置,因此不需要基点控制器之间的列车切换(切换处理)。简而言之,UTCS作为引入下一代CBTC的策略,有着CBTC所有的优势。
例如,为了实现在当前信号系统下,可以在轨道和道路上运行的双模式车辆(DMV)和轨道巴士的概念,需要通过在轮和轴上使用夹轨器的轨道电路法来与UTCS系统相协调。而对于可同时在新干线和常规铁路线上自由运行的轨距可变列车而言,用轨道电路法进行稳定列车检测又是必不可少的。UTCS本身则不依赖于轨道电路,它在消除这些约束的同时,为DMV和轨道巴士的实现提供了可行的设想。
另外,为了用当前信号系统来增强运行密度和运行速度,就需要采用对闭塞区间进行划分、增加信号种类、改变标号系统、改变铁路道口的控制器的位置等措施。然而,根据目前铁路状况,是不可能实施这些增强措施的,这也阻碍了提高铁路运输和车辆运输等的竞争力。幸运的是,列车位置检测技术、不依赖于轨道电路的驾驶室信号技术以及铁路道口的无线电控制等技术将同时消除这些困难,以达到增加铁路运行速度和密度,并且实现增强交通系统性能的目的。
UTCS系统作为列车自主系统,能够涵盖车载连续位置检测等基本功能。使用这种基本功能技术,可以收集商业车辆跟踪诊断信息,为现代化的维护工作开辟了一条道路[4,5]。
与现有的列车控制系统相比,UTCS的使用可以减少现场设施,比如,消除了站台的互锁装置。与此同时,UTCS的结构也使接口数量进一步减少,比如,移除了信号装置和ATP组件之间的接口单元,以及闭塞系统和ATP系统的集成。这些设备的节省将大大增强可靠性和可维护性。此外,由于人为失误在接口端引起的故障概率降低,安全优势将会提高。因此,UTCS将有助于铁路系统的鲁棒性的提高。
UTCS的最终架构将仅包括安装在铁路现场的转辙机和铁路道口控制装置等基本元件。这种方法被概括为“基本控制”的设想。它的应用毫无疑问可以提高可靠性、安全性和可维护性,并且能够以低成本来修建铁路系统。
6.总结
本文提出了一种新型的UTCS系统,该系统通过功能层、网络层和终端层的分层结构来实现列车控制,同时讨论了系统以及各层之间信号的处理方式。事实证明,现有的信号系统可以灵活地发展成不需要基点控制器的理想CBTC系统。CBTC系统和ATP闭塞系统组合构成最小系统的方式将应用在地方铁路。为了说明这种方式的优势,笔者会努力尽快实现这一方案,因为它会有效地提高铁路系统的鲁棒性和竞争力。ATP闭塞系统是实现基本控制概念的一个很好的例子。
致谢
感谢京都电气制造有限公司和日本大学的工作人员共同开发和研究UTCS。
[1] Akita K, editor. Railway signal. Tokyo: Japan Railway Electrical EngineeringAssociation; 2015. Japanese.
[2] Yamazaki I, Uchida D. Start of using ATACS level crossing control function. JREA 2015;58(8):22–5. Japanese.
[3] Nakamura H. Notification of “ATP Block system” test completion. Kyosan Circular 2015;66(1):8–9. Japanese.
[4] Nakamura H, Takahashi S, Hiramoto T, Mochizuki H, Mizuma T. Onboard measurement method for signaling equipment on Probe Train. In: Allan J, Brebbia CA, Rumsey AF, Scuitto G, Sone S, Goodman CJ, editors Computers in railways X: computer system design and operation in the railway and other transit systems. Ashurst: WIT Press; 2006. p. 945−54.
[5] Nakamura H. Advances in signalling systems and the outlook for next-generation train control systems in Japan [presentation]. In: 3rd Asia-Pacific Control Command and Signalling (CCS) Workshop; 2014 Oct 22–23; Tokyo, Japan. 2014.
E-mail address: nakamura.hideo@nihon-u.ac.jp
2095-8099/© 2016 THE AUTHORS. Published by Elsevier LTD on behalf of Chinese Academy of Engineering and Higher Education Press Limited Company.
This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/).
英文原文: Engineering 2016, 2(3):380–386
Hideo Nakamura. How to Deal with Revolutions in Train Control Systems. Engineering, http://dx.doi.org/10.1016/J.ENG.2016.03.015
