探讨利用无人机影像测制1∶1万3D产品
2016-03-08朱建华武利峰王历明
朱建华,李 磊,武 坚,武利峰,王历明
(61243部队,甘肃兰州730020)
探讨利用无人机影像测制1∶1万3D产品
朱建华,李磊,武坚,武利峰,王历明
(61243部队,甘肃兰州730020)
摘要::无人机具有机动性强、获取数据快和可以低空飞行的特点,以甘肃某测区为例,介绍其影像数据生产1∶1 万3D(DEM、DOM、DLG)产品的过程,探讨了成果精度,并提出了改进建议。
关键词:无人机;3D产品;成果精度
1 概述
无人飞行器低空遥感系统(Unmanned Aerial Vehicle Low Altitude Remote Sensing System,UAVRS)是以无人机为摄影平台[1],以CCD相机(charge-coupled device camera)为影像数据获取工具,飞行高度为2000m左右,能够获取高分辨率影像的航空摄影测量系统[2]。通常由飞行平台、成像载体、地面监控、数据处理、综合保障等部分组成[3],具有低成本、轻便灵活、无需专用机场支持等特点[4]。目前,利用UAVRS所获得的高分辩率影像能够取得多种地形图产品[5]。本文就无人机数据后处理工序的生产与应用,谈谈对无人机影像作业的思考及建议。
2 试生产应用情况介绍
笔者单位在甘肃某机场进行了多次实飞作业,并对所获取的影像进行了后续处理。成果为1∶1万的3D(DEM、DOM、DLG)产品。现以测区试生产为例展开讨论。
2.1测区概况及所获取的影像数据
测区位于甘肃西部,地形由平地过度到山地,平均海拔1300m,平均高差约200m,区内以沙漠、戈壁为主,植被少,有少量建筑物。作业区域的地理情况适用无人机飞行,实飞过程中获取影像数据为11条航线,288张影像。除小部分影像模糊,个别区域影像旁向重叠度低小于35%外,影像质量总体良好,符合1∶1万地形图成图要求。
2.2摄影测量试生产情况
试生产采用吉威公司编写的软件DPS3.0(Digtal Photograppy System),按照摄影测量内外业作业流程,生成三种测绘产品,分别为数字正射影像图(DOM)、数字高程模型(DEM)、数字线划图(DLG)[6-7]。作业总体流程具体如图1所示。
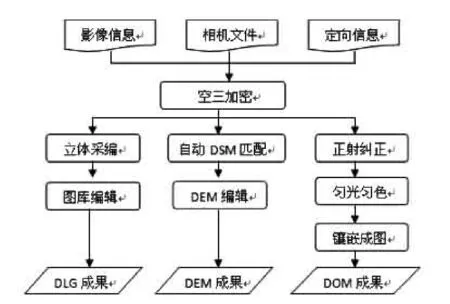
图1 无人机影像处理生产作业流程图
2.3成果精度分析
此次作业利用GPS RTK技术野外实测26个像片控制点数据为基础,进行区域测量控制平差解算。所取得的空中三角测量和3D产品的成果精度,见表1。
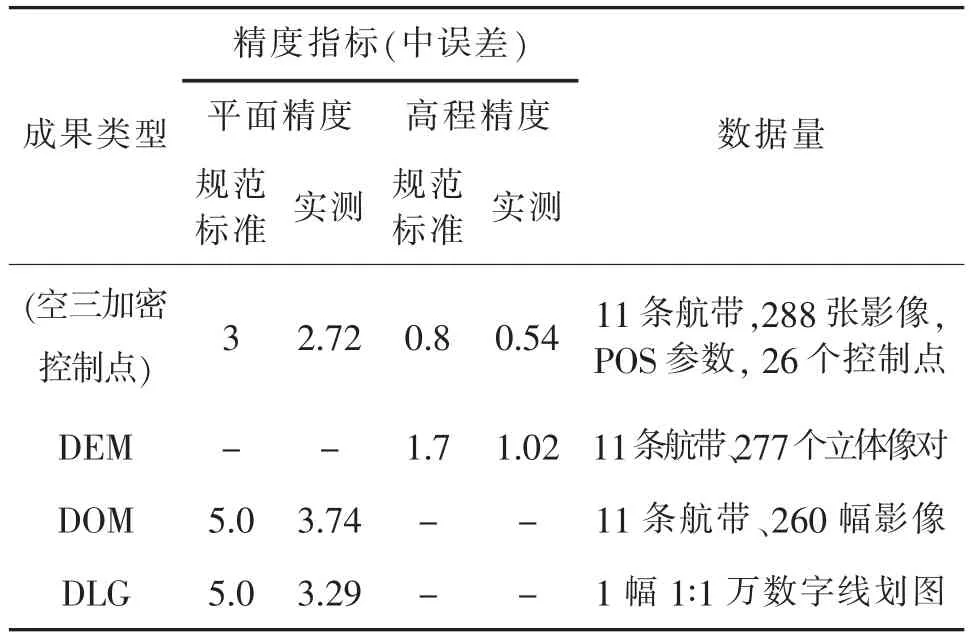
表1 成果精度统计表(单位:m)
根据表1成果精度分析,可以得出:该型无人机测绘系统可以满足比例尺为1∶1万测绘产品的生产。
2.4作业情况分析
1)影像前期检查及处理。由于无人机在空中作业时,受气流影响较大,造成原始影像变形较大,同时,鉴于无人机空中姿态的原因,个别影像出现模糊情况,给影像前期检查及处理效率造成一定的困难,较常规航空数字影像处理效率低20%~30%。
2)空中三角测量。在进行空三加密时。利用26个控制点进行控制网平差解算,分为“初始构网、自由网平差、连接点精确匹配、自由网平差、刺点与控制网平差”等步骤。由于软件采用由粗到细,由少到多,逐步精确的方式进行全自动连接点匹配,完成全自动匹配的连接点不仅数量多,而且分布均匀,有效保证了空三成果精度和稳定性,且该匹配技术对测区形状、大小、影像质量要求较低。因此,所需的工时比传统加密方式减少约一半的工作量。
3)数字正射影像和数字高程模型作业。数字高程模型采用“DEM预处理,自动DSM/DEM匹配,DEM合并”等步骤。数字正射影像采用“自动规划,正射纠正,自动匀光匀色,镶嵌线自动匹配,镶嵌成图”等步骤。从生产过程来看,与航空影像数据处理相比该软件自动化程度较高,整体效率较高。
4)数字线划图作业。由于无人机所搭载的测量型相机像幅过小,为36mm×48mm,致使数据的采集效率低,进度慢。比有人航摄数据采集所需时间多3倍以上(在地貌,地物和作业员熟练情况大致相同时)。后续编辑、入库、出图所需工时基本一致。
3 提高无人机测绘系统软硬件的建议
结合前期作业的实际情况和特点,认为在无人机影像数据在获取与处理方面可以进行改进,以提高其应用效率和范围。
1)提高相机像幅,减少像片数量。此型无人机搭载的相机像幅为36mm×48mm,在航高2500m航摄时,某地区100km2区域内需获取300张左右影像,造成片像数量大,预处理工作量大,影像重叠度大,建议加大相机的像幅,以减少数片数量。
2)稳定无人机空中飞行姿态,确保影像重叠度达到作业标准。由于无人机体积小,抗气流等能力弱,造成空中姿态变化大,在飞机平稳状态下航带间偏移量较大,容易产生航摄漏洞。同一条航带高差最大80m,平均40m左右。同时两条相邻间航带由于风速和风向的原因,造成影像航向、旁向重叠度不够,利用常规作业软件基本无法完成后续空三测量计算等作业。因此飞行作业前期的准备工作要充分、细致,将不利气候条件影响降到最小。
3)提高无人机POS参数(定位定向参数)精度。现无人机所搭载的相机POS参数是利用GPS(全球定位系统)与IMU(惯性测量装置)相结合的方式确定,由于IMU参数精度不高,造成定位参数误差过大。在飞行稳定的情况下,成果影像最大平面误差约为40m左右,平均误差25m左右。飞机受气象因素干扰时,会出现误差过大,无法解算POS数据。建议采用精度高的POS系统。
4)提高空中数据传输速度以方便影像实时检查。由于影像数据量过大,航拍数据不能实时传输下载至数据处理单元,有一定的时间延迟。造成不能实时人工检查影像质量,不能及时发现航摄漏洞及其他影像质量问题,造成飞行成果生成滞后。建议加大数据传输流量与速率。
4 小结
对于无人机数据处理功能的拓展,主要是受无人机硬件技术上的不足所影响,难以在短期内解决。特别是无人机由于体积小,自重轻,空中抗干扰能力差这一先天不足对获取影像造成的影响是前期无法解决的。这些都对后续处理提出了更高的要求。
参考文献:
[1]张强.低空无人直升机航空摄影系统的设计与实现[D].郑州:信息工程大学,2007.
[2]何敬.无人机影像制作大比例尺地形图实验分析[D].北京:测绘通报,2009(8):24-27.
[3]杨爱琳,孙汝岳,徐开明.基于固定翼无人机航摄影像获取及应用探讨.测绘与空间地理信息,2010,33(5):45-48.
[4]李金火,张其康,陈碧兴.大比例尺航测成图的航摄比例尺探讨[J].地矿测绘,2002,18(2):28-29.
[5]汤国安.遥感数字图像处理[M].北京:科学出版社,2004: 60-80.
[6]李德仁.摄影测量与遥感概论[M].武汉:测绘出版社, 2001:151-169.
[7] TOUTIN T,CHENIER R.GCP.Requirement For High-res olution Satellite Mapping[J].International Archives of Fho togrammetry.Remote Sensing and Spatial Information Sci ence,2004,35(3):836-839.
中图分类号:P318.63
