基于地球磁场的室内定位系统的研究
2016-03-07熊明亮刁梦雯赵国梁
熊明亮 刁梦雯 赵国梁
摘要:文章设计了基于地磁的室内定位系统,给出了系统的结构框图,介绍了地磁的模型及地磁基准图的构建。然后介绍了地磁的校正方法以及基于蒙特卡洛方法的粒子滤波地磁匹配算法。文章在粒子滤波的重采样过程中通过复制重要粒子以及重新采样低权值粒子提高了定位的性能。
关键词:地磁;室内定位;蒙特卡洛;粒子滤波;重采样
随着通信技术和物联网技术的发展,工业和服务行业信息化需求急剧上涨,定位技术极大地便捷了人们的生产和生活。其中室内定位技术在医院、仓库、博物馆、机场、车站、商场等场合有着极大的应用需求。通过使用地球磁场的物理量进行室内定位具有无源、无辐射、全地域、全天候、体积小、能耗低的优势。基于地磁的室内定位技术包含有地磁传感、地磁校正、室内地磁地图构建及地磁匹配滤波等过程。
1地磁模型及地磁传感
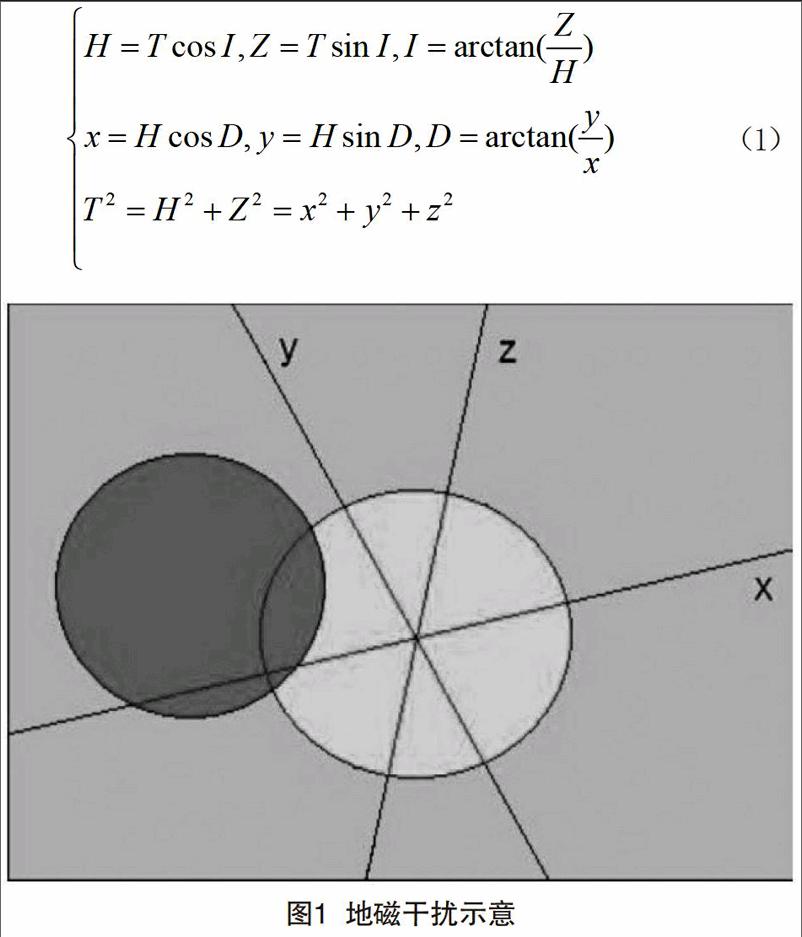
地磁场是有大小、有方向的矢量,其值可以通过地磁三分量表示。通过地磁三分量可以引出水平强度、地磁总场、磁偏角、磁倾角等信息。这些信息被称作地磁七要素,均可作为地磁定位的特征量。令X,Y,Z分别为地磁的北向强度、东向强度和垂直强度,如图1所示。各个地磁信息之间有着公式l所示的转化关系。
公式1中H为水平分量,它与X的夹角D称为磁偏角。T为地磁总场。地磁总场与水平分量的夹角I被称作磁倾角。
在室内每隔一米作为一次采集节点,每个点包含X,Y,Z等地磁数据,在室内采集M*N个点以制作成室内地磁基准图。
2地磁传感校正
由于具有磁性的物体或者是可以影响局部磁场的物体存在,所以磁场传感器所处的位置的磁场会有偏差,这种影响即地磁干扰。在没有地磁干扰时,传感器绕着Z轴旋转,则水平分量在XY平面内总是图3中绿色部分,即以Z轴为圆心的标准圆。一般来说,我们认为地磁干扰γ1在某一点为一恒定的矢量,则实际测量值α为实际地磁量β与γ之和。因此实际测量的地磁量在XOY内的投影为图1中红色部分,即一个位移的圆。
因此根据上述特点可知,我们在某一点通过旋转传感器采集各个方向的地磁数据,则各个数据在空间直角坐标系中可以构成一个位置的球体。根据公式2可以计算出球心。于是对于每个地磁分量减去位移的大小就可以对地磁干扰进行校正。针对这种校正原理,一般有绕八字校正法和十面校正法。
3基于地磁的室内定位系统
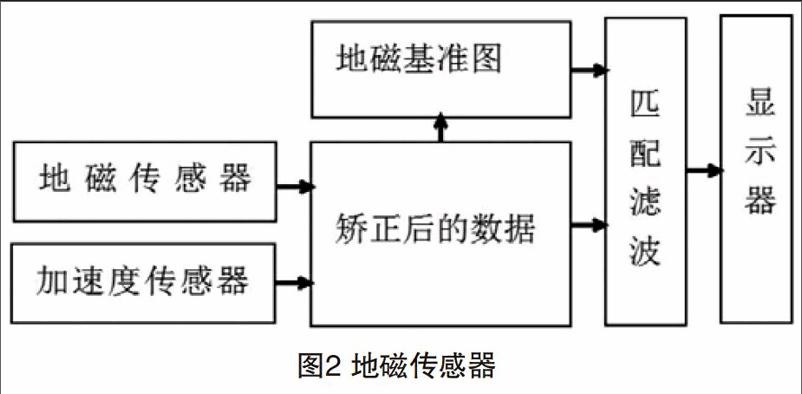
地磁定位系统首先通过传感器采集磁场数据,然后对地磁干扰进行球体位移的校正。在磁场传感的过程中同步采集三轴加速度传感器的数据,算出翻滚角和俯仰角以进行姿态的矫正。通过所获取的最终的传感数据建立地磁基准地图。在实际人员行走中,通过一定的条件触发一次上述的采集过程,通过匹配算法进行滤波并显示结果,该过程如图2所示。
基于地磁的室内定位系统由地传感器、三轴加速度传感器、主控芯片、键盘、显示器及电源管理模块组成。
4地磁匹配算法
地磁匹配的算法通过实时采集的传感器所处位置的地磁物理量及人员运动的状态与预先采集建立的地磁基准图进行匹配从而进行定位。目前,地磁匹配算法有很多种,有最小距离度量法、相关度量法和粒子递推滤波等方法。本文采用的粒子滤波算法基于蒙特卡洛方法,核心思想是通过序列重要性采样和随机近似概率分布递归来计算相关概率分布。
其方法是先建立地磁基准地图,由于条件限制,这里在长30m的走廊只取地磁总场强度作为特征值存入地图记作Mi,然后通过线性插值后使分辨率为0.1m每个点。每次的状态记作Xt,传感器所处位置的地磁总场强度记作Zt,则t时刻目标的重要性函数为:
(1)重要的粒子复制,根据归一化权重将权值大的粒子进行多次复制,将权值小粒子进行删减。
(2)不重要的粒子重新根据均匀分布重新采样,即对权值进行排序,将排序靠后的粒子进行重新分布。
5总结
本文设计了一个基于地磁传感的室内定位系统,对基于蒙特卡洛方法的粒子滤波定位算法进行了验证,实际测试匹配精度可以稳定为2m以内。本文中给出的方法的特点是通过提前预测粒子的运动方向以使得粒子的更新更容易收敛。在重新采样过程中,将不重要的粒子进行重新均匀分布以避免经过多次滤波后粒子集中在某几个原始位置上。在后续的研究中将提高系统的抗噪性能,并且从人员运动状态预测的精度上提高定位的精度。
