基于视觉数据的移动机器人导航模糊控制*
2016-03-04杨世锋李文锋周建荣
杨世锋 李文锋 周建荣
(武汉理工大学物流工程学院1) 武汉 430063) (东莞博思电子数码科技有限公司2) 东莞 523000)
基于视觉数据的移动机器人导航模糊控制*
杨世锋1)李文锋1)周建荣2)
(武汉理工大学物流工程学院1)武汉430063)(东莞博思电子数码科技有限公司2)东莞523000)
摘要:针对非完整移动机器人传统控制算法时间复杂度高,实时性、鲁棒性弱,在非线性复杂系统中难以建模的问题,提出一种基于模糊算法的移动机器人控制方法.该方法在对移动机器人进行建模和实验分析的基础上,通过摄像头反馈模块获取视觉数据并计算输入偏差,通过模糊算法建立模糊控制关系,实现了非完整移动机器人点镇定控制和路径跟随控制的融合.经实验误差数据分析,控制方法具有较好的鲁棒性及实时性,系统具有较好的精度.
关键词:模糊控制;移动机器人;视觉数据;误差分析
杨世锋(1991- ):男,硕士,主要研究领域为移动机器人控制理论与控制工程
*湖北省自然科学基金项目资助(批准号:2014CFB875)
0引言
移动机器人控制技术研究是机器人研究中十分重要的一环,它能够在二维平面乃至三维空间上拓展传统固定式机器人的目标工作空间,对增强机器人的机动性和灵活性意义重大.而移动机器人的控制所具有的非完整性约束特性,使得对于移动机器人这一非线性系统的控制比一般系统的控制困难许多[1].
目前对移动机器人控制问题包括三个基本方面:点镇定控制、路径跟随和轨迹跟踪.点镇定控制是通过某种控制律设计使得非完整移动机器人无限逼近指定的理想目标点,并且在实际位姿上与期望位姿保持一致.而路径跟随主要是实现对理想路径的时间无关跟随,在控制律上普遍采用一般非线性控制结构.轨迹跟踪研究集中在跟踪一条平面内关于时间参数的几何曲线,其给定线速度与角速度均与时间参数相关.点镇定控制中,由于移动机器人本身不满足Brokett光滑连续的镇定的必要条件[2],只能寻求闭环控制系统中状态误差反馈的非连续定常控制律来解决.文献[3-4]运用非线性控制技术解决路径跟随的问题,主要通过非线性控制改变移动机器人运动速度从而达到路径跟随.文献[5]设计了运动速度和加速度受限条件下的移动机器人视觉反馈路径跟随.赵玲等[6]通过构建机器人移动偏差方程调节主从机器人速度实现匀速圆周轨迹跟踪的协同控制.文献[7]设计了在极坐标平面下基于视觉反馈的非完整机器人渐进稳定镇定控制器,利用视觉信息的状态检测使得移动机器人点镇定控制具有很好的鲁棒性.总体上看,利用反馈闭环控制实现非完整移动机器人的路径跟随取得了很好的研究效果,而不同的控制律设计在实现控制目的的精度和可靠性方面存在很大差异,对于系统精度分析方面缺少系统的描述.传统控制模型在点镇定控制的移动的过程中,整个系统的超调量大,稳定性较差.文中着重分析在视觉反馈与控制律设计上实现移动机器人的路径跟随控制,并对其实现精度进行了测试评价.
1系统总体框架
控制系统由摄像头识别模块、上位机模块、移动机器人模块组成.其中摄像头识别模块检测移动机器人当前的位置及姿态角信息,并实时写入数据库.上位机模块通过读取当前移动机器人的位姿信息,结合理想路径点信息进行分析计算,并将实时处理信息通过Zigbee网络发送到相应的移动机器人模块中.移动机器人通过实时处理信息作出模糊决策,通过闭环状态反馈消除误差从而实现点镇定控制.系统整体见图1.
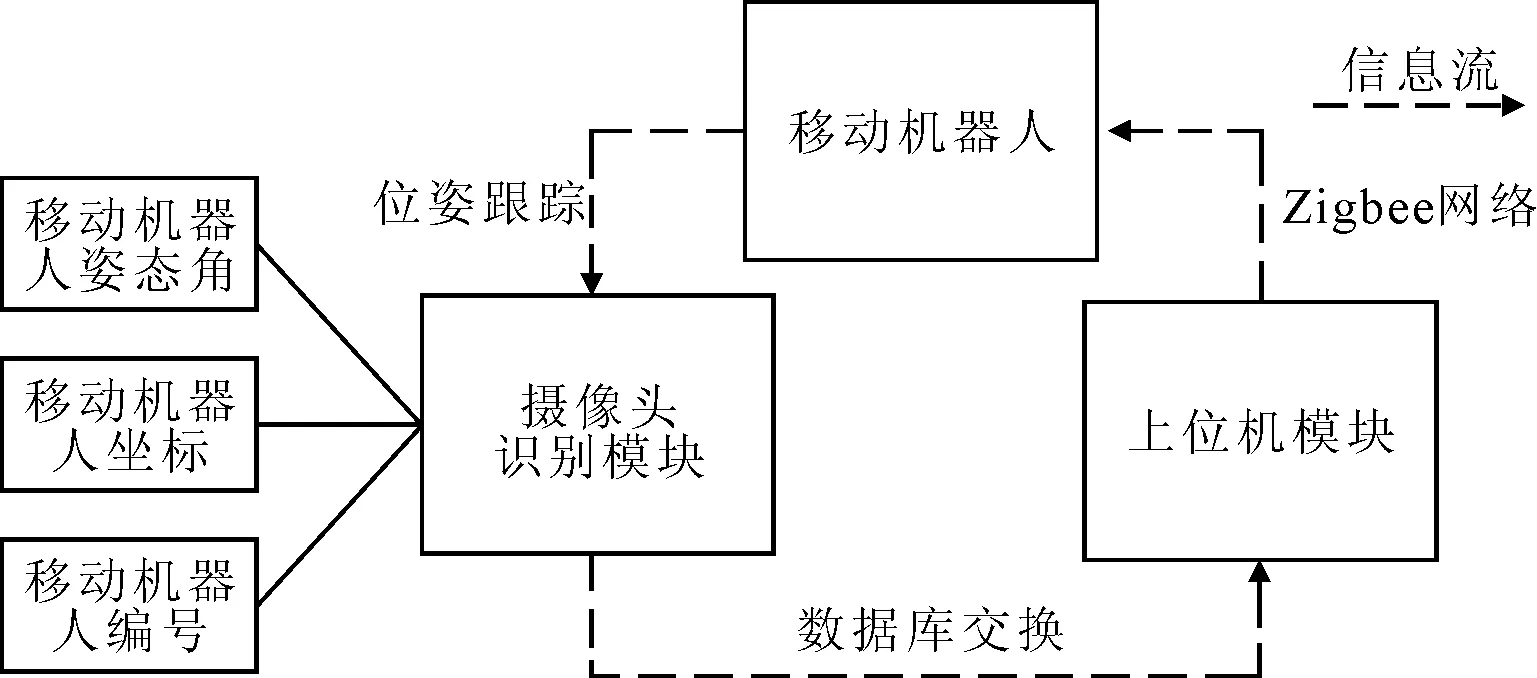
图1 系统整体框图
2移动机器人运动模型分析
移动机器人运动学模型见图2.
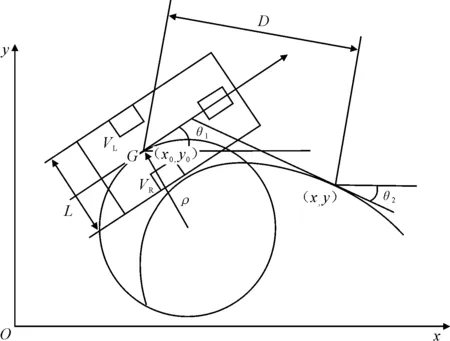
图2 移动机器人运动学模型
移动机器人为三轮结构,其中前导轮为万向轮,仅起稳定结构作用,左右轮为步进电机控制的驱动轮,为机器人移动提供动力.
图2中,L为机器人整体宽度;G为机器人整体中心;当前所处位置机器人起始方向角为θ1;下一个目标点对于路径切向角为θ2;ρ为运动的曲率半径.
假设在机器人移动过程中车轮相对地面无滑动,且机器人质心与其中心重合.
则t时刻机器人左右轮瞬时线速度
(1)
(2)
且机器人质心处瞬时线速度
(3)
曲率半径
(4)
由式(2)可见,移动机器人的旋转曲率半径与左右驱动轮的瞬时线速度有关,当VL=-VR时曲率半径为0,此时机器人绕质心原地旋转,当VL=VR时曲率半径为无穷大,此时机器人直行.其他情况下,机器人以一定的曲率半径左转或者右转.
由于系统的采样频率为100 Hz,路径点密集,取极短时间间隔Δt内有:Δθ=θ2-θ1,取Δt→0,则
(5)
角度误差
(6)
距离误差
(7)
且
(8)
由式(6)~(8)可知取极短时间内角度误差Δθ和位置误差D可以解算出移动机器人的左右轮线速度从而控制移动机器人的运动.
3移动机器人模糊控制律设计
根据以往移动机器人角度偏差跟踪的经验,约定以下操作经验的语言描述.
经验1为了避免角度偏差过大,在调整大角度误差时应采取大速率调整.
经验2当角度偏差减小到一个较小数值时,在调整小角度误差时应采取小速率调整.
经验3角度偏差调整进入缓冲区域时,调整速率应当进一步减小,对差速中较大的驱动轮施加轻微刹车.
经验4角度偏差几乎要调整到极小值时,此时应当释放两轮速度差,依靠惯性进行调整.
经验5采取不同角度偏差调整策略时,应当考虑移动机器人对偏角的敏感度.
取模糊控制器的输入量为机器人的角度偏差Δθ和偏角敏感度Θ.并取论域U(决策方案)上的模糊子集:x1(大速率调整),x2(小速率调整),x3(施加轻微刹车),x4(惯性调整),x5(直行)构成标准决策模型库.输入角度偏差Δθ论域为[-180°,180°],将其离散等级划分为5个模糊子集{NB,NS,Z,PS,PB},偏角敏感度论域同样划分为5个离散模糊状态{NB,NS,Z,PS,PB},论域为[-1,1].输出决策根据调整角度方向与标准决策模型划分为9个离散状态{NB,NM,NS,NZ,Z,PZ,PS,PM,PB},通过运动模型分析解算出其论域表示为左右步进电机驱动轮步数比波动范围为[-3,3].依据专家经验法实践,输入角度偏差Δθ及决策模型U的隶属度函数取三角形函数,输入角度敏感度隶属度函数取钟型隶属度函数[9].见图3.
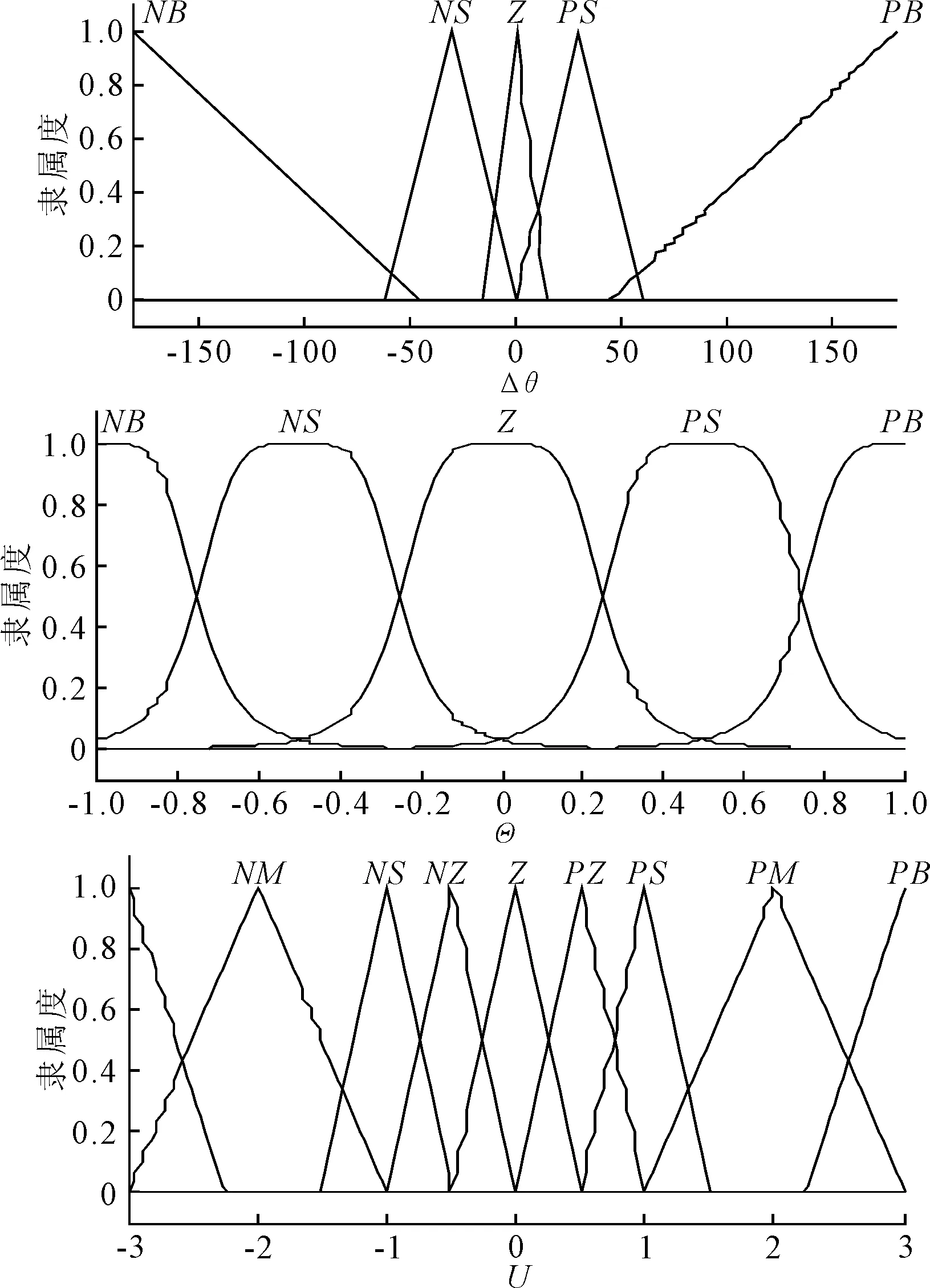
图3 Δθ,Θ,U隶属度函数

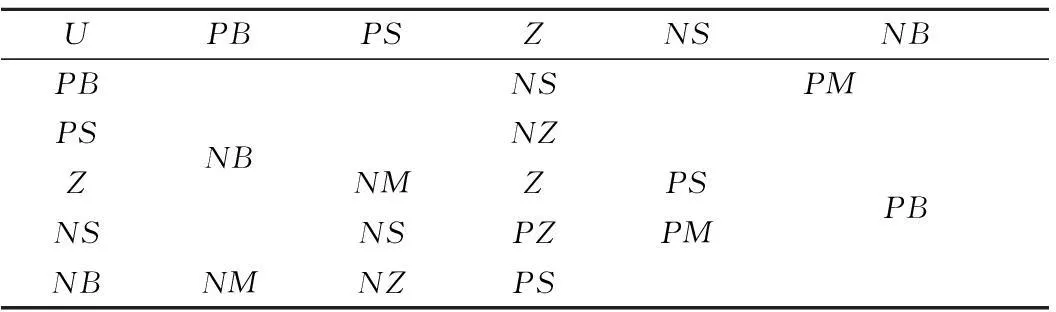
表1 模糊控制规则
至此,模糊控制器的逻辑结构设计完成.将该模糊控制的算法应用在移动机器人底层控制器,并对其进行编程实现.
4实验误差分析
4.1误差分析方法
分别取2条理想路线对移动机器人系统做误差分析,理想路径节点为一系列离散点.通过模糊控制器控制机器人在理想路径上运行,并通过摄像头以5 Hz的频率采样机器人运动路径得到实际运动的离散路径点.通过分析两条曲线的接近程度,对系统进行评价.
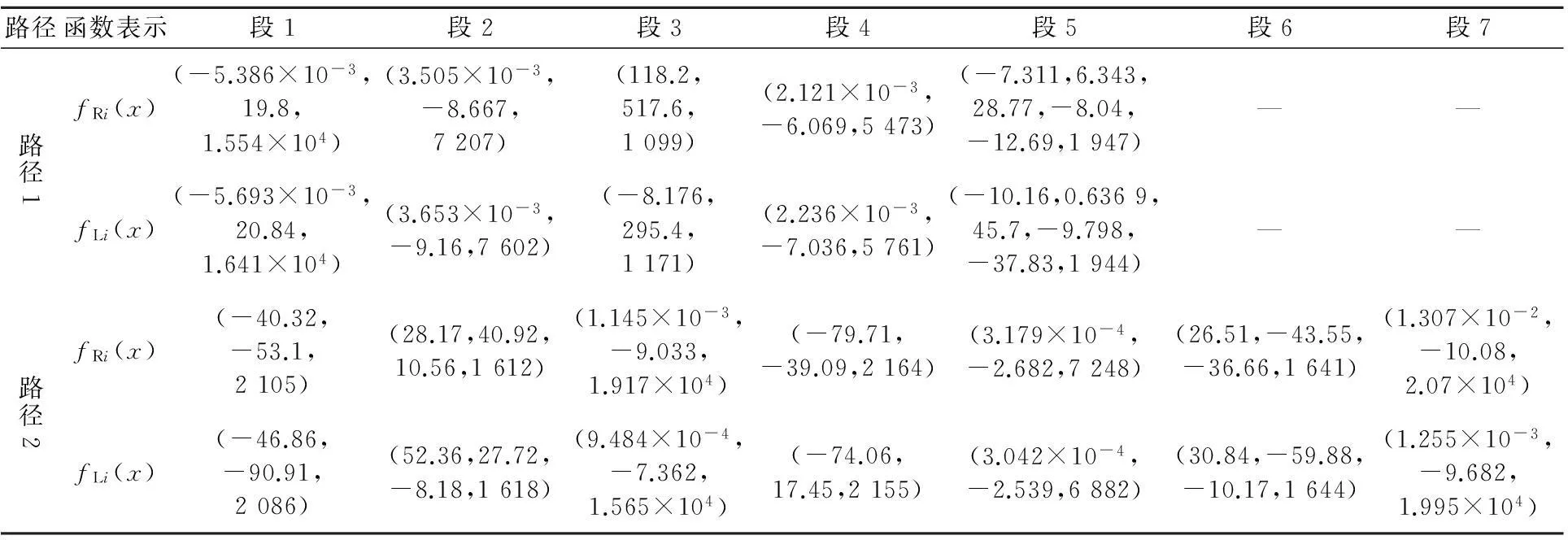
理想路径节点与实际运动的路径节点为离散点,考虑到理想路径节点与实际采样得到的路径节点在时域上并非一一对应关系,采用分段拟合的方法将两条路线分别进行拟合,可得拟合后的路径函数表示如下.
理想路径离散点拟合函数:
(9)
实际路径离散点拟合函数:
(10)
式中:fLi(x)为理想路径离散点分段拟合函数;fRi(x)为实际路径离散点分段拟合函数;i为分段编号.依次用n次多项式拟合分段函数,2条选取路径的分段拟合函数值见表2.表2中仅给出n次多项式拟合系数.
得到分段拟合函数后,分别取相同的x或者y坐标对每段分段函数求取偏离平均值ei:
(11)
式中:[ai,bi]为分段函数的区间.
最终可得理想路径与实际路径的偏差平均值.
(12)
由式(12)可求取2条路径的偏差平均值E,E值越小,表明该控制系统在实验路径下的整体精度越高.
5.2实验数据分析
在5 000 mm×2 400 mm的实验场地中,分别取2条理想实验路径做运行分析,其中实际路线点由移动机器人运动过程中摄像头以5 Hz采样频率采样得到.理想路径与实际路径曲线图见图4,其中实线曲线为理想离散点构成的路径,虚线曲线为实际离散采样点构成路径:
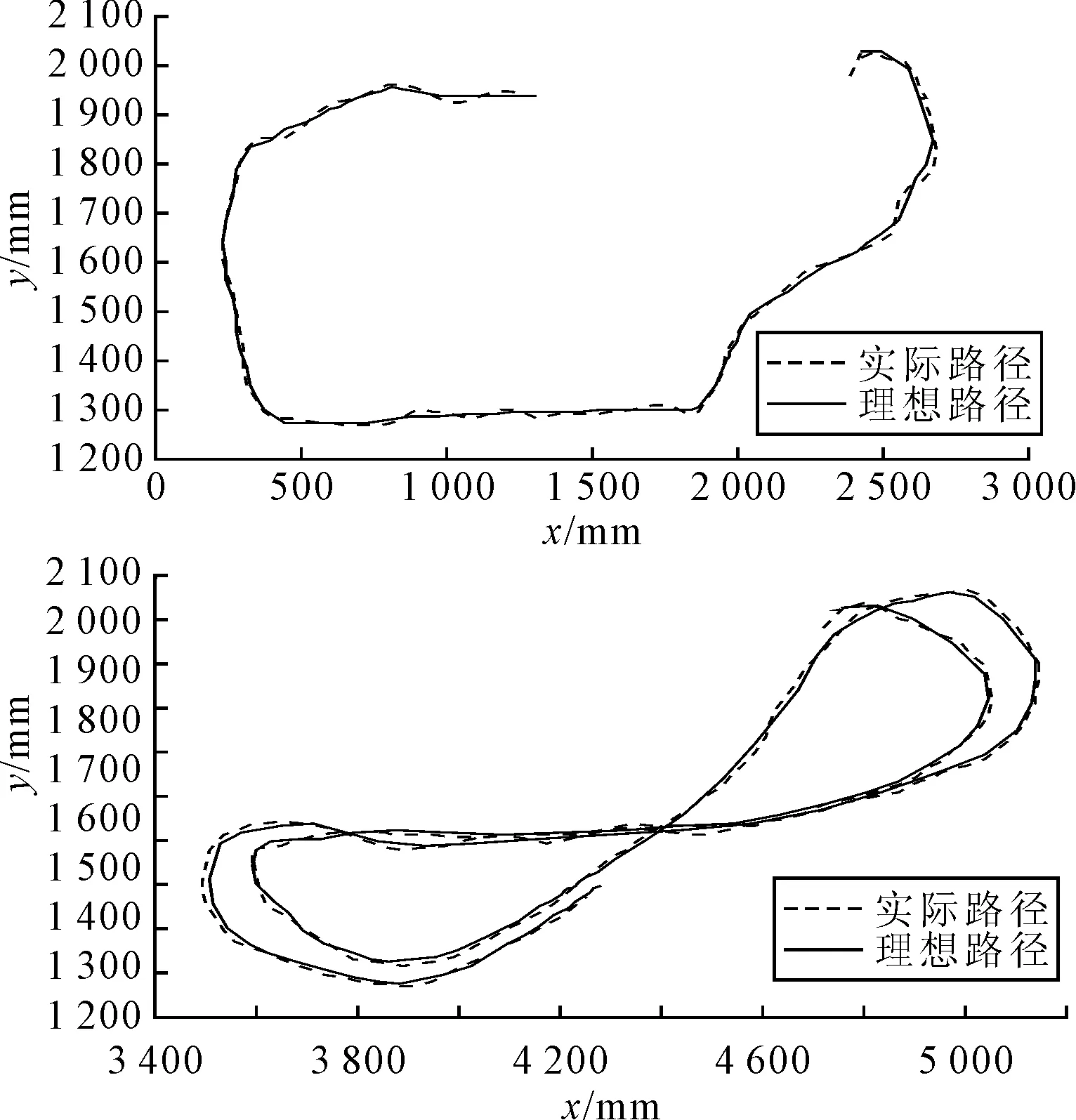
图4 理想路径与实际实验路径曲线对比
按5.1误差分析方法得到相应的误差分布见表3.
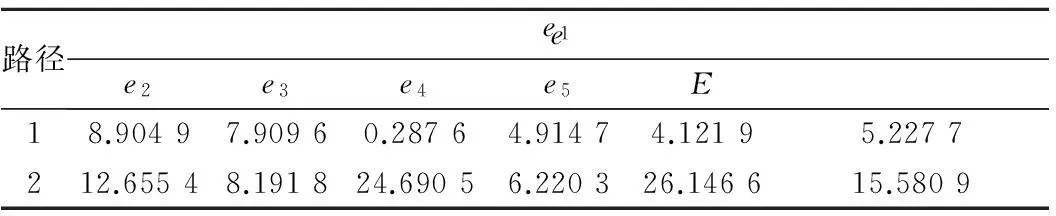
表3 误差分布表 mm
在路径1下运行的平均误差为5.227 7 mm,较为复杂路径2下运行平均误差为15.580 9 mm,在模糊控制器下移动机器人实时校正的效果好,在形状不同的路径情况下仍然保持较好的控制精度.
5结 束 语
系统运用摄像头捕捉移动机器人运动信息,并通过计算机分析处理和模糊控制实现移动机器人寻点移动,并进行实时路径精度校正.系统在不同复杂程度路径下能保持较好精度控制,在模糊控制律下通过较少的机器人运动特征输入,能够达到很好的实时控制精度.
参 考 文 献
[1]KOLMANOVSKY I, MCCLAMROCH N H. Developments in nonholonomic control problems[J]. Control Systems, IEEE,1995,15(6):20-36.
[2]BROCKETT R W.Asymptotic stability and feedback stabilization,In: geometric control theory[J]. Boston: Birkhauser,1983(1):181-191.
[3]CUPERTINO F,GIORDANO V,NASO D,et al.Delfine Fuzzy control of a mobile robot[J]. IEEE Robot Autom,2006,13(4):74 -81.
[4]MUCIENTES M,ALCAL&AACUTE J,FDEZ R,et al.A case study for learning behaviors in mobile robotics by evolutionary fuzzy systems[J].Expert Syst,2010,37(2):1471-1493.
[5]ANTONELLI G, CHIAVERINI S, FUSCO G. A fuzzy-logic-based approach for mobile robot path tracking[J]. Fuzzy Systems, IEEE Transactions on,2007,15(2):211-221.
[6]赵玲,叶景志,廖鑫江.基于网络反馈的多移动机器人协同控制[J].自动化与仪表,2012,27(9):11-13.
[7]LóPEZ-NICOLáS G, SAGüéS C. Vision-based exponential stabilization of mobile robots[J]. Autonomous Robots, 2011, 30(3): 293-306.
[8]叶锦华.不确定非完整轮式移动机器人的运动控制研究[D].广州:华南理工大学,2013.
[9]PILTAN F, SULAIMAN N, SOLTANI S, et al. An adaptive sliding surface slope adjustment in PD sliding mode fuzzy control for robot manipulator[J]. Order,2011,4(3):55-58.
Fuzzy Control of Mobile Robot Based on Visual Data
YANG Shifeng1)LI Wenfeng1)ZHOU Jianrong2)
(SchoolofLogisticsEngineering,WuhanUniversityofTechnology,Wuhan430063,China)1)
(BOSIElectronicDigitalTechnologyCo.,LTD,Dongguan523000,China)2)
Abstract:There are some flaws existing in traditional algorithm of nonholonomic mobile robot,such as large time complexity, weakness in robustness and real-time performance,difficult to modeling problem in the complicated nonlinear system.In consider of these problems,this research puts forward a kind of mobile car control system based on fuzzy algorithm.The system is based on the robot modeling and experimental analysis,by inputting virtual data and calculating deviation, established fuzzy control relation using fuzzy algorithm,implement a real-time adjustment of point stabilization and path tracking control. Analysis of experiment data proves that the method has great robustness and real-time and system has high precision.
Key words:fuzzy control; mobile robot; visual data; error analysis
收稿日期:2015-12-12
doi:10.3963/j.issn.2095-3844.2016.01.032
中图法分类号:TP242
