载人航天器在轨维修地面仿真验证技术
2016-03-03魏传锋
李 涛,魏传锋,李 伟,张 伟
(中国空间技术研究院 载人航天总体部,北京 100094)
载人航天器在轨维修地面仿真验证技术
李 涛,魏传锋,李 伟,张 伟
(中国空间技术研究院 载人航天总体部,北京 100094)
为满足载人航天器型号对微重力和真空环境下的维修性仿真验证需求,文章提出并实现了一种混合式仿真验证平台。阐述了在轨维修仿真验证平台整体构架,建立了航天员模型、航天服模型及舱体维修模型,给出了在轨微重力和真空环境下进行维修的可视性、可达性及维修操作时间的仿真验证方法。利用该平台对在轨维修任务进行仿真验证,结果表明,该平台可以有效仿真和验证在轨维修,为维修性设计和优化提供了手段。
载人航天器;仿真验证;在轨维修
0 引言
在轨维修是保障载人航天器寿命期间高可靠性的必要手段[1-2]。航天器在轨维修分舱内维修和舱外维修。在轨维修时,人员、设备、工具受微重力环境影响,其运动特性与在地面不同;舱外维修时,航天员穿着舱外航天服移动和操作,受真空环境影响,其运动能力和可视、可达范围受到限制。因此有必要对航天员在轨维修全流程操作的可视、可达、可操作进行验证。以往验证方法主要是舱体环境下的地面维修试验和中性浮力地面模拟试验:地面维修试验可验证设备的安装和拆卸操作,但无法模拟微重力环境下的人员和设备转移[3];中性浮力地面模拟试验允许人员直接参与试验,试验件与真实设备接口相同,参试人员可获得直观感受,并且试验时间长,但水槽试验需要专门设计适用于水下且耐腐蚀的试验设备和工具,代价大,且水对人体和设备移动存在阻力,无法模拟舱内维修时的人体移动和操作[4-5]。
针对以上问题,本文提出并实现了一种混合式的载人航天器在轨维修仿真验证平台,将地面试验数据、水槽试验数据和在轨数据引入系统,对维修操作的可视、可达、可操作进行仿真验证,同时使用运动捕捉设备进行人在回路仿真,以及对载人航天器在轨维修的全流程进行仿真验证,对维修操作进行精细化仿真。
1 航天器在轨维修特点
1.1 微重力环境
1)安装限位装置
微重力环境下在轨舱内维修时,一般在故障设备附近设计软质脚限制器固定操作者身体,才能使航天员腾出双手进行维修操作;舱外维修则必须在舱体表面安装机械脚限位装置来固定航天员。
2)人员和工具移动方式
航天员在舱内移动和搬运维修设备大多采用漂移的方式,速度比在地面步行、爬行快1~2倍。航天员之间传递工具和维修备件时,大多是轻轻推出,使其漂到另一航天员附近,工具传递速度一般为1~1.5 m/s,备件一般为0.3~1 m/s,工具或备件体积越大传递速度越慢。
3)维修可视域
微重力环境下,航天员身体体液上升,眼压变化,其视锥体中心线会下降约14.7°[6]。
1.2 真空环境
1)维修时间约束
舱外维修时航天员需穿着舱外航天服,舱外航天服提供的氧气、水、气压、电等资源有限,因此单次出舱维修须满足时间约束[7]。
2)维修操作能力
舱外航天服存在内外压差,航天员移动和操作需要克服压差阻力,各关节活动能力降低,可达范围变小,同时受航天服头盔限制,可视范围缩小。
2 在轨维修仿真验证方法
2.1 在轨维修仿真平台
2.1.1 仿真平台整体架构
在轨维修仿真验证平台包括航天员三维人体模型库管理模块、维修工具库管理模块、仿真模块和维修评价模块,整体构架如图1所示。平台采用Jack作为基础软件,通过Pro/E和Maya等三维建模软件建立航天员、舱体、工具、机械臂和设备等的模型,转换为JT格式,然后将模型导入Jack环境组装成维修仿真场景;通过仿真模块控制航天员移动和机械臂大范围转移,到达维修工作点后,通过运动捕捉设备、数据手套等虚拟现实设备驱动人体数字模型进行维修操作仿真;仿真过程中通过维修时间库、姿态库对维修过程进行时间估算和姿态分析,并采用Phython语言编写程序模块从仿真环境中实时提取维修分析和评价的数据,再利用 socket通信将数据发送到维修评价模块进行评估。

图1 仿真验证平台架构图Fig.1 Framework of the simulation system
2.1.2 仿真建模
1)航天员建模
航天员在舱内维修时,大气环境和航天员活动能力与地面相同;在舱外维修时,受舱外航天服限制,活动能力不同,因此需要对舱内、舱外航天员模型分别建模。
① 舱内航天员模型
依据中国成年人人体尺寸建模,以Jack中95%分位的中国人体模型为基础进行二次开发。首先测量航天员身高、臂展等,根据测量数据建立人体骨骼模型,并在骨骼关节点施加关节自由度约束(图2(a));然后根据腰围、臀围等数据建立人体肌肉和表面模型,最终得到人体模型,见图2(b)。
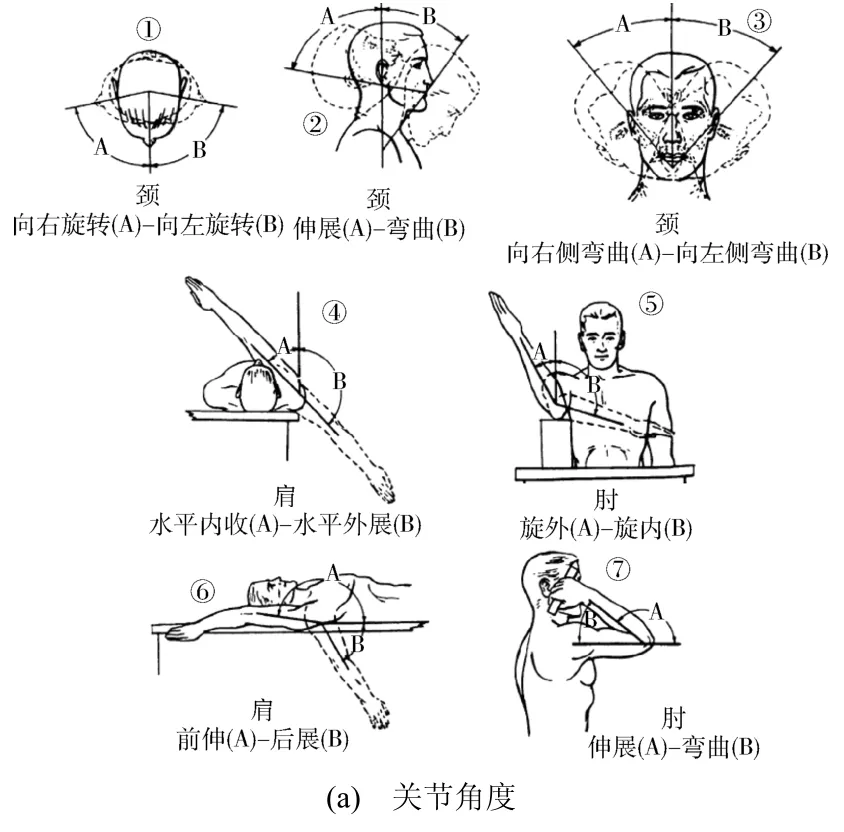

图2 航天员模型Fig.2 Astronaut model
② 舱外航天员模型
舱外维修时航天员穿着的舱外航天服内外压差为30~50 kPa,航天员活动能力受航天服影响,因此舱外航天员模型建模时需与航天服合并建模。本文采用三维建模软件建立航天服几何模型;然后用该几何模型替换Jack中原有人体模型数据,并保留人体头颈部模型;同时利用TCL语言对Jack人体模型的关节自由度进行限制和修改,使其自由度与航天服关节自由度一致。
2)航天器平台建模
航天器平台包括舱体、维修设备、机械臂、工具等,均采用自底向上的方法进行建模,本文以机械臂为例进行阐述。以关节自由度基准坐标系为局部坐标系,建立关节几何模型,局部坐标系z轴为机械臂关节自由度旋转中轴,原点O为z轴与两关节接触面的交点,xy面为关节接触面,如图3(a)所示;如果关节是中间关节,则在关节自由度中心分别建立局部坐标,如图3(b)所示。
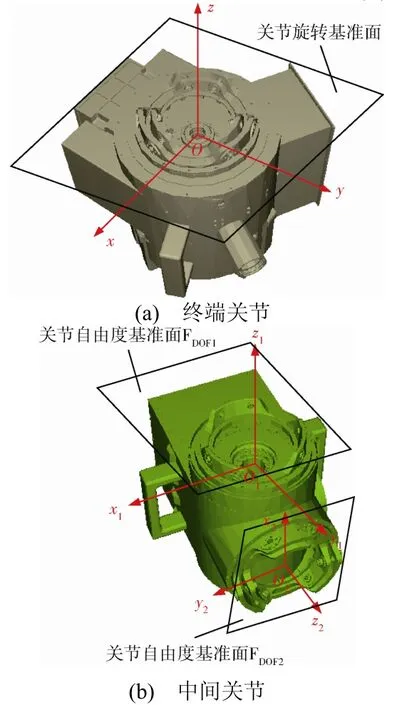
图3 机械臂关节模型Fig.3 Robot joint model
关节建模完成后,将模型导入Jack环境,从终端固定关节开始组装机械臂,利用Jack在关节1的O点和关节2的O1点之间创建Joint旋转自由度并设置旋转角度范围,保存为Figure模型,即完成机械臂的建模,结果如图4所示。
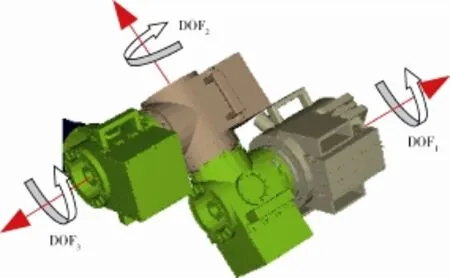
图4 机械臂组装模型Fig.4 Robot arm model
2.2 在轨维修可视性验证方法
可视性验证采用视锥体验证法[8-10],首先建立航天员视锥体,然后在维修操作中利用视锥体与维修操作接口的相对位置进行可视性验证。
2.2.1 航天员视锥体
舱内航天员视锥体定义为肢体以及环境保持不变的情况下,仅眼球运动就能观察清楚的区域;舱外航天员可视区域受舱外航天服头盔影响,其视锥体定义为航天员颈部运动情况下透过头盔能够看到的区域。视锥体范围内的可视区域分为最大可视范围和最佳可视范围。视锥体数据通过地面试验,从水平和垂直2个方向获取。图5为美国航天员视锥体[11]。

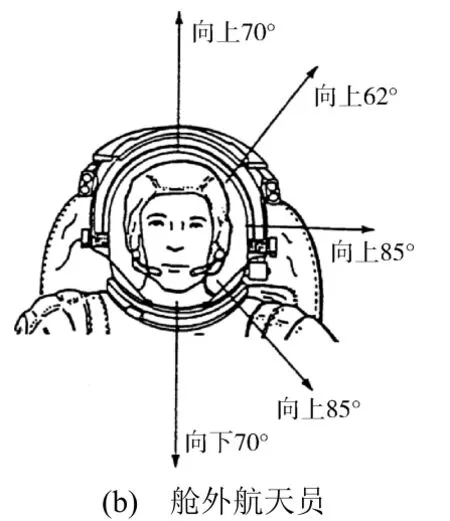
图5 航天员视锥体Fig.5 View frustrum of astronaut
2.2.2 可视性验证方法
将视锥体建成三维模型,导入虚拟仿真平台,利用视锥体与机械接口的相对位置进行可视性评价,评价方法分为沉浸式和非沉浸式。
1)非沉浸式验证方法
设计人员参考常用维修姿态库对数字人体姿态进行设置,然后在人眼处生成视锥体,对维修操作对象是否在视锥体内进行验证。由于航天员在轨微重力环境下视锥体中心线会下降约14.7°[6],所以评价时视锥体做相应下调,如图6所示。
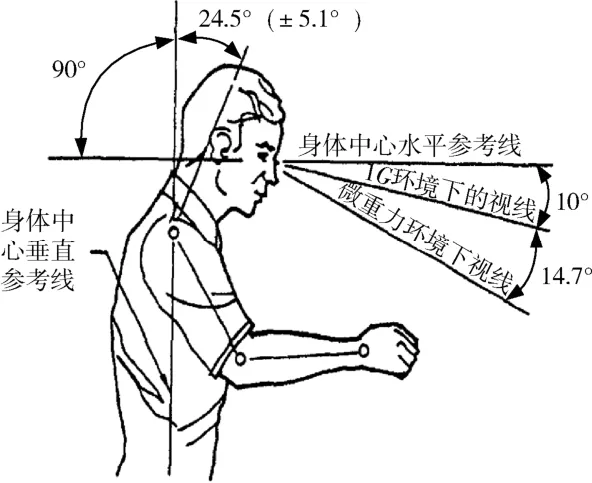
图6 航天员非沉浸式视锥体验证Fig.6 Non-immersive visibility analysis for astronaut
2)沉浸式验证方法
在轨维修时航天员需要频繁地调整身体姿势,因此非沉浸式方法效率较低。为了提高维修操作全过程验证效率,本文采用沉浸式方法[12]。沉浸式验证方法采用人在回路方式,地面设计人员模拟航天员利用舱内脚限位器固定身体后的维修操作,利用运动捕捉器、数据手套捕获人体运动数据,输入仿真平台,驱动数字人体模型运动,同时将视锥体内的图像投影到数据头盔中,进行可视性验证,如图7所示。

图7 航天员沉浸式视锥体验证Fig.7 Immersive visibility analysis for astronaut
2.3 在轨维修可达性验证方法
采用可达区域法验证航天员在维修操作过程中对机、电、液接口的接触可达性。可达区域是指航天员身体躯干和环境保持静止的情况下,手部能够抓握到的区域。航天员在舱内操作时,其肩、肘、腕关节自由度与地面相同,因此可对数字人体模型的肩、肘、腕关节角度范围进行遍历,通过运动学解算手部可达区域,如图8所示。

图8 舱内航天员操作可达区域Fig.8 Cosmonaut reachability area
航天员进行舱外操作时受舱外航天服内外压差影响,航天员可达区域无法用运动学进行解算,因此需通过地面试验获取航天员着服情况下在水平和垂直方向能够达到的区域,试验方法如图9所示[11]。根据试验数据拟合舱外航天服可达区域的封闭三维模型,导入仿真验证平台进行仿真验证,当维修操作接口位于模型内部时,则表明可达。

图9 舱外航天服可达区域模型Fig.9 Reachability area of extravehicular spacesuite
2.4 在轨维修时间的仿真方法
维修操作时间是影响维修实施方案的重要因素。利用仿真平台对维修全流程进行过程仿真,建立维修任务模型,如图10所示。
预计维修时间时需将维修全流程逐级分解至基本维修作业,然后利用在轨数据、地面模拟试验数据和数字仿真数据对基本维修作业时间进行预计,最后通过加权推导出维修全流程的时间。舱内基本维修作业时间包括拆卸螺钉、移动等。维修任务全流程时间采用时间累计法进行仿真验证,串行作业的维修时间等于串联的基本维修作业时间的累加值,并行作业维修时间为各项维修作业时间的最大值,即

其中:ti是该维修任务中第i项维修活动的时间;ki是第i项维修活动对整个维修任务的影响权重,通过专家打分法获得;m是维修任务中维修活动的总数。
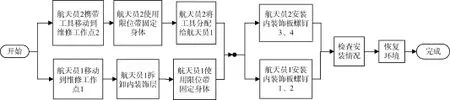
图10 维修任务模型Fig.10 Maintenance task model
3 结束语
本文对载人航天器在轨维修仿真验证方法进行研究,提出并实现了一种混合式仿真验证平台,综合地面试验数据、水槽试验数据、在轨数据对在轨维修全流程进行仿真验证,可以对在轨维修的可视、可达、维修时间以及维修姿态进行仿真验证。利用本平台对实际任务进行了仿真验证,仿真结果与实际操作结果在可视性、可达性和维修姿态方面基本一致;维修操作时间是仿真时间的1~2倍,其原因是目前在轨数据较少,平台的基本维修作业时间大多从地面试验得来,利用在轨数据对平台的仿真模型进行修正是下一步研究的重点。
(References)
[1]BARTH T.A NASA perspective on maintenance activities and maintenance crews: KSC-2007-235[R].Kennedy Space Center, 2007
[2]王大鹏, 谭春林, 张柏楠.载人航天器在轨维修性系统设计[J].中国空间科学技术, 2010, 30(5): 16-22 WANG D P, TAN C L, ZHANG B N.On-orbit maintainability system design for manned spacecraft[J].Chinese Space Science and Technology, 2010, 30(5): 16-22
[3]李喆, 朱亚力, 范高洁, 等.载人航天器密封舱内管路设备维修设计与验证[J].航天器环境工程, 2014, 31(3): 321-325 LI Z, ZHU Y L, FAN G J, et al.Design and verificationof on-orbit maintenance of pipe equipment in manned spacecraft pressure module[J].Spacecraft Environment Engineering, 2014, 31(3): 321-325
[4]王奇, 陈金明.美国的中性浮力模拟器及其应用[J].航天器环境工程, 2003, 20(3): 53-59 WANG Q, CHEN J M.American neutral buoyancy simulator and its application[J].Spacecraft Environment Engineering, 2003, 20(3): 53-59
[5]AKIN A D L, HOWARD R D.Neutral buoyancy simulation for space tele-robotics operations[J].Proceedings of SPIE: The International Society for Optical Engineering, 1991, 1612: 414-420
[6]Man-systems integration standards: NASA-STD-3000[S], 1995
[7]WIELAND P O.Living together in space: the design and operation of the life support systems on the International Space Station: NASA/TM1998-206956[R].Alabama: NASA Marshall Space Flight Center,1998
[8]周栋, 霍琳, 王美慧, 等.虚拟维修技术研究与应用[J].北京航空航天大学学报, 2011, 37(2): 231-236 ZHOU D, HUO L, WANG M H, et al.Research and application of virtual maintenance technology[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(2): 231-236
[9]蒋伟, 尚建忠, 曹玉君, 等.维修性可达性设计中的人体手臂控制[J].机械设计与研究, 2009, 25(4): 73-76 JIANG W, SHANG J Z, CAO Y J, et al.Research on human-arm control method in maintainability[J].Machine Design and Research, 2009, 25(4): 73-76
[10]崔晓风, 冯武斌, 项昌乐, 等.基于虚拟维修的装甲装备维修性分析与验证方法研究[J].兵工学报, 2009, 11(30): 1430-1434 CUI X F, FENG W B, XIANG C L, et al.Research of maintainability and validation methods in armored equipment based on virtual maintenance[J].Acta Armamentarii, 2009, 11(30): 1430-1434
[11]MARCELINO L, MURRAY N, FERNANDO T.A constraint manager to support virtual maintainability[J].Computers & Graphics, 2003, 27(1): 19-26
[12]蒋科艺, 郝建平.沉浸式虚拟维修仿真系统及其实现[J].计算机辅助设计与图形学学报, 2005, 17(5): 1120-1123 JIANG K Y, HAO J P.Development of an immersive virtual maintenance simulation system[J].Journal of Computer-Aided Design & Computer Graphics, 2005, 17(5): 1120-1123
(编辑:冯露漪)
Simulation and validation technology of manned spacecraft on-orbit maintenance
LI Tao, WEI Chuanfeng, LI Wei, ZHANG Wei
(Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China)
According to the simulation requirements of on-orbit maintenance task for manned spacecraft mission, we propose a mixed validation method which can simulate the influence of microgravity and vacuum.Our proposal includes the framework of the simulation system, and the modeling method of the cosmonaut, the extravehicular activity pressure suite, the robot arm model, and others.An actual mission is simulated and the difference between the simulation and the real mission process is analyzed.The results indicate the method is reliable for the maintenance design and optimization.
manned spacecraft; simulation and validation; on orbit maintenance
V476.1
:B
:1673-1379(2016)05-0510-06
10.3969/j.issn.1673-1379.2016.05.009
李 涛(1986—),男,硕士学位,从事载人航天器总体设计工作。E-mail: libitpeter@126.com。
2016-03-03;
:2016-09-18
