多用途机械手结构的设计
2016-03-03宋开功张荣芳山东协和学院
朱 英 宋开功 李 姣 张荣芳/山东协和学院
多用途机械手结构的设计
朱 英 宋开功 李 姣 张荣芳/山东协和学院
本课题设计为一种四自由度多用途机械手,主要用于车间、货场等自动搬运,以代替人力作业。针对该多用途机械手的特点,对其整体方案、结构部件系统进行设计,并对其各个组成部分,如驱动装置、执行装置等进行了详细的分析设计计算,使其结构布局和受力合理。其中包括液压缸、齿轮齿条等标准件的选择、计算。并采用先进的工程软件Solidworks、AutoCAD进行二维、三维视图的绘制。
四自由度;机械手;液压驱动;AutoCAD
1.引 言
机械手是在机械化,自动化生产过程中发展起来的一种新型装置,模仿人手的部分动作,按照给定程序、轨迹和要求实现自动抓取、搬运或操作动作的自动化执行装置。具有自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用,它是机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性[1]。
2.系统组成及设计参数
2.1系统组成
该系统由机械手(执行装置)、机身(驱动装置)两部分组成;都是由液压来完成动作。本机械手具有机身旋转、升降、手臂伸缩以及旋转四个自由度。驱动方式为液压驱动,系统压力为4MPa,共有机身升降油缸、机身旋转油缸、手臂伸缩油缸、手臂旋转油缸以及机械手夹紧油缸5个液压缸[2]。机械手由执行系统,驱动系统和控制系统组成以及位置检测装置等组成。
2.2设计参数

抓重量50公斤手臂伸缩行程1200mm手腕回转范围0°-180°自由度4个手臂伸缩速度200mm/s手腕回转速度45°/s最大工作半径1400mm升降行程120mm驱动方式液压手臂最大中心高1250mm升降速度120mm/s夹持范围100-180mm
3.总体方案设计
方案一、四自由液压机械手
该机械手通过液压驱动,通过液压缸实现手臂伸缩、手臂旋转、机身升降、旋转四个自由度,速度快、灵活方便、便于控制,负载较大。
方案二、四自由度气压传动机械手
此机械手由气缸提供动力,实现X轴、Y轴、Z轴移动以及手部转动四个自由度,优点是反应快、动作迅速,缺点是负载较小。
方案三、电动液压混合驱动
该方案手臂之间的动力传动靠齿轮传动来实现,抓手工作通过液压传动实现,抓手上部通过伺服电机驱动,配合转盘实现360°回转,灵活方便。
出于设计人的能力有限,此次设计所选择的方案为方案一。在该方案中,动力全部由液压缸提供,这样在工作时系统稳定,且可以很好的完成任务要求。
4.设计计算
4.1夹紧液压缸主要尺寸参数的确定
(1)液压缸内径D的计算
由单活塞杆式液压缸的推理公式:

按照GB/T2348-1993标准系列直径回整,取D=25mm。
(2)活塞杆直径d的计算
活塞杆直径可按工作压力确定,对于常速比的液压缸可根据已定的缸径D查下表确定:液压缸工作压力(MPa)≤5,取(0.5~0.6) D;液压缸工作压力~7取(0.6~0.7)D;液压缸工作压力>7取0.7D[3]。
4.2机械手臂运动机构的设计
根据任务书要求,手臂的伸缩长度为1200mm,所以,根据GB2349-1980,选择液压缸活塞行程L为1250mm,又根据要求L≤(20~30)D0,可以D0≥40mmmm,因此,取液压缸外径D0=40mm,而液压缸内径D的值根据GB/T2348-1993取为30mm;查表确定活塞杆的直径d=0.6D=0.6×30mm=18mm,根据GB/T2348-1993,确定活塞杆的外径为22mm。
4.3齿轮齿条的计算
由齿轮传动的设计参数、许用应力大小、齿轮的设计计算最终确定齿轮数据:模数m=2 、齿数z=20 、分度圆直径d=40mm 、齿高h=4.25mm、齿宽b=24mm[4]。
5.结构设计与三维造型
5.1总体设计

图1 总装图
图1中,机身总共有四个液压缸,通过1手腕旋转液压缸、6升降缸、17手臂伸缩缸以及23手臂旋转液压缸实现四个自由度。设计中,机身2可以起到手腕抗弯的作用,16导杆、21连杆可以起到手臂的抗弯的作用,在其跟7机身套筒的相互配合中,应该及时添加润滑油。其中,21连杆可以再机械手套筒上滑动,既能起到抗弯的作用,又能实现设计本身对于自由度的设定要求。
5.2机械手抓手设计
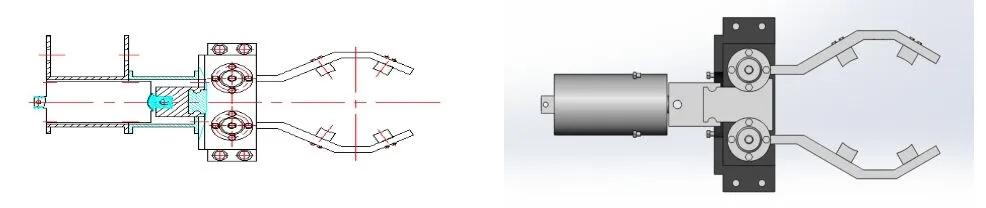
图2 机械手抓手及三维造型
