辅助北斗技术的捕获空间计算和误差分析
2016-03-01谢棋军陈新刘佩林
谢棋军 陈新 刘佩林
摘要:结合辅助北斗定位技术的辅助信息类型,提出了北斗GEO和NGEO卫星在星历辅助条件下的卫星信号载波频率和码相位的估计方法,在此基础上重点研究了估计得到的载波频率和码相位的不确定度,并针对粗时间和精时间这两种典型的辅助定位技术进行了算例分析。研究结果表明:粗时和精时辅助能有效减少捕获搜索空间;引起载波频率搜索范围不确定度的因素是时钟频偏和接收机动态,而引起码相位搜索范围不确定度的因素是辅助时间精度和辅助位置误差。
关键词:辅助定位技术;粗/精时间辅助;载波频率和码相位;捕获搜索范围
随着导航技术的发展以及实际应用对于弱信号快速定位的需求,辅助全球导航卫星系统(A-GNSS)[1-3]技术已经成为导航领域的研究热点。目前在其他国家,卫星定位系统(GPS)、GALILEO、GLONASS等导航系统均已进入第三代合作伙伴计划(3GPP)组织并形成相应的A-GNSS行业标准,而中国辅助北斗定位技术(A-Beidou)的标准化工作处于起步阶段,亟需针对其特点对各项指标进行不断研究,推进其加入3GPP标准。
1 A-Beidou捕获搜索空间的估计
卫星信号捕获是一个频率和码延迟的二维搜索过程,卫星和接收机在两者连线方向上的相对运动所引起的多普勒效应决定了接收机在载波频率一维空间搜索的范围,接收机接收到卫星信号的时刻决定了接收信号的伪码相位值,时刻的精度决定了接收机在伪码相位空间内搜索的范围。
1.1 载波频率的估计
利用辅助星历/历书、时间可以计算出卫星的位置和速度[4],如果接收机的位置和速度也已知,则可以进一步计算出卫星和接收机连线方向的多普勒频偏,为捕获提供初始信息。北斗卫星包括地球同步轨道卫星(GEO)和非地球同步轨道卫星(NGEO),卫星的位置和速度需要分开计算。接收机接收到的北斗卫星信号的多普勒频移计算公式如下:
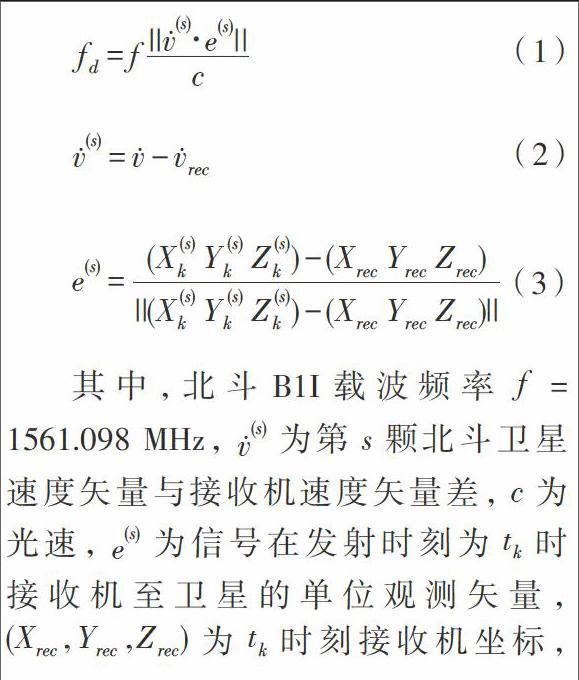
其中,[Nkbit]代表第k颗卫星在找到[SOWk]之后导航比特的个数,[Nkms]代表第k颗北斗卫星传输完最后一个导航电文比特之后的整毫秒数,也称为扩频码周期数,[Nkcodephase]为第k颗北斗卫星的码相位。[Nkbit]、[Nkms]和[Nkcodephase]以时间为单位[5]。
辅助北斗定位技术以接收时间作为辅助的时间信息,根据辅助的接收时间和接收机以及通过辅助星历/历书计算得到的卫星坐标,可以反推出北斗卫星传输时间,并可以计算得到码相位。如图1所示,北斗卫星的传输时间记为[TOT],接收时间为[TOR],卫星信号传播时间记为[TOF],则码相位2.1 频域搜索空间模糊度分析
(1)辅助时间精度对载波频率的影响
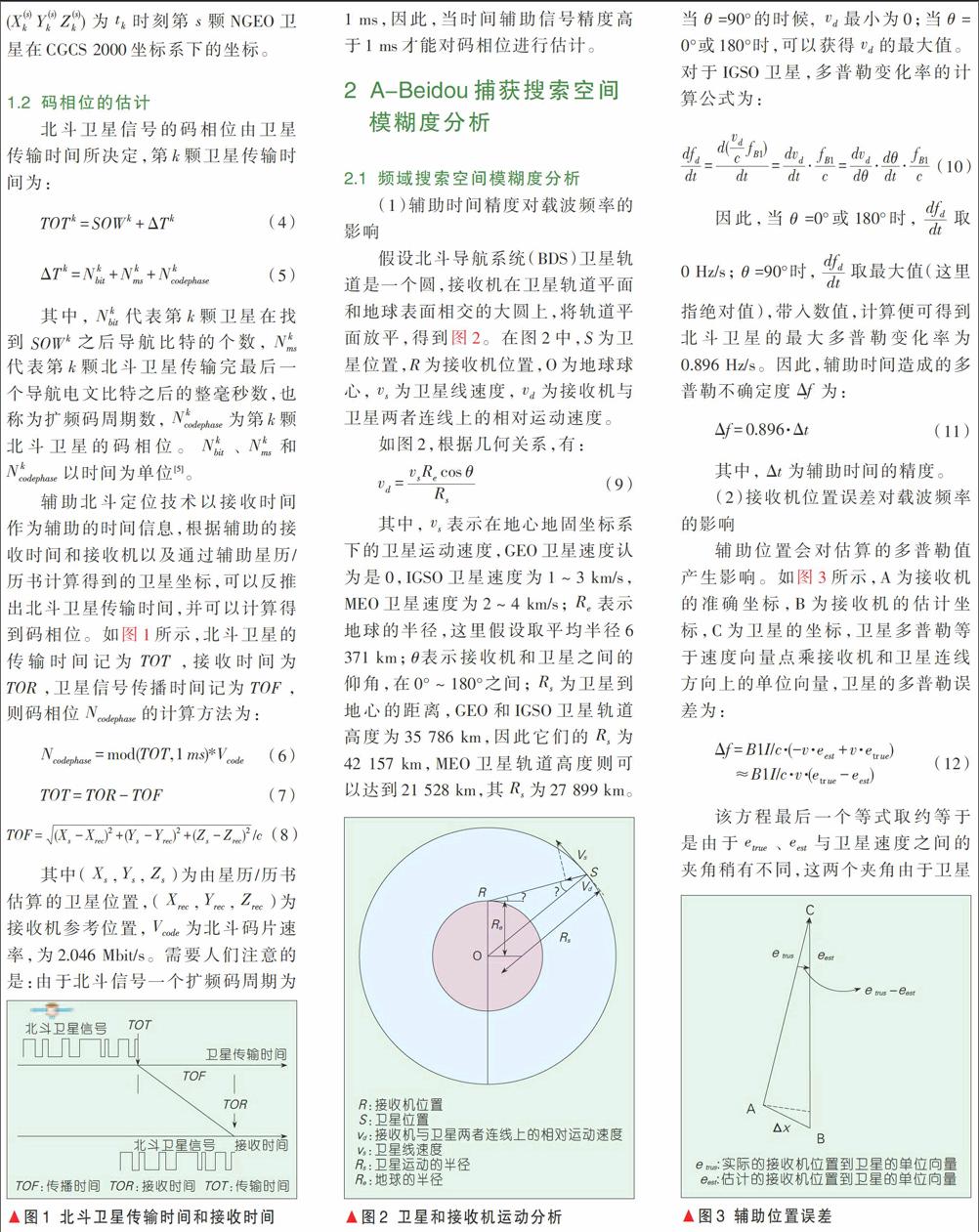
假设北斗导航系统(BDS)卫星轨道是一个圆,接收机在卫星轨道平面和地球表面相交的大圆上,将轨道平面放平,得到图2。在图2中,S为卫星位置,R为接收机位置,O为地球球心,[vs]为卫星线速度,[vd]为接收机与卫星两者连线上的相对运动速度。
如图2,根据几何关系,有:
(3)大气层延迟对码相位的影响
大气层延迟主要包括电离层延迟和对流层延迟两部分,其影响量级从几米到几十米,是全球卫星导航系统(GNSS)导航定位的主要误差源,恶劣情况下大气层延迟会对码相位产生多个码片的误差。
(a)电离层延迟估计
北斗电离层模型的建立基于地理坐标系,利用刺穿点的地理经度与太阳地理经度的差值和刺穿点的地理纬度作为变量构造电离层模型。北斗提供了Klobuchar8参数电离层改正模型来估计电离层延迟,得到电离层延迟[Iz(t)]。
(b)对流层延迟估计
现有的估算修正对流层延迟的模型有很多种,主要有Hopfield模型、Saastamoinen模型等,我们采用精度较好的Saastamoinen模型估算对流层延迟,得到电离层延迟[Iz(t)]。
(c)大气层延迟所造成的码相位误差
根据(a)、(b)的分析,大气层延迟对码相位造成的误差为:
[Δcode=[ΔS+Iz(t)]·Vcode/c] (21)
其中[Vcode]为北斗扩频码速率,为2.046 Mcps;c为光速;[ΔS]和[Iz(t)]为估计的对流层和电离层造成的距离误差,当误差为100 m时,将导致将近一个码片的误差。
3 A-Beidou捕获搜索空间计算和分析实例
本节将给出粗时和精时两种算例,分别估算北斗卫星的捕获空间,并对估算模糊度进行分析。
选择NGEO卫星6,采用的辅助数据包括以下几个参数。
(1)时间:2014年7月1日上午8点整,时间精度粗时辅助为2 s,精时辅助为10 us。
(2)星历:2014年7月1日上午8点整的1号卫星和6号卫星的16参数星历。
(3)接收机位置:地理坐标为北纬121.4°、东经31.2°、高度为6 m,接收机位置水平误差为5 km,接收机速度80 km/h。
(4)接收机晶振频偏:100 ppb。
在精时辅助下6号卫星的速度为1 315.8 m/s,进一步求得载波频率估计值为243.46 Hz,根据公式(6)—(8)求得码相位估计值为1 108.84码片。根据频率搜索空间模糊度分析公式(11)、(13)—(15)可以分别计算得到粗时辅助和精时辅助频率误差的结果,见表1、表2。根据公式(16)、(20)、(21)得到精时辅助的码相位误差结果,见表3。
3.1 粗时间辅助搜索空间分析
根据计算结果我们可以知道:6号卫星总的辅助频率搜索范围为
-275.491~+275.491 Hz,同样的算例,不采用相关辅助信息,搜索范围将达到-5~+5 kHz,大概是采用辅助信息时搜索范围的18.18倍。晶振的偏差引起的频偏占整个捕获频率搜索总空间的很大一个比例。
3.2 精时辅助搜索空间分析
根据计算可知:6号卫星总辅助频率搜索范围为-273.70~+273.70 Hz,同样的算例,不采用精时辅助,搜索空间将小于采用粗时辅助下的搜索空间,也远远小于不采用辅助信息时-5~+5 kHz的搜索空间,但是优化的搜索空间较粗时间辅助也就是减少了个位数的搜索Hz数。粗时间辅助对码相位搜索空间是没有变换的,都是2 046个码片。从表3可以看出精时间辅助可以大大缩小码相位的搜索空间。在本算例中6号卫星码相位搜索空间由不采用辅助信息的2 046个码片减少至-54.76~54.76码片,大概会减少了将近19倍的搜索空间。
4 结束语
结合辅助北斗定位技术的辅助信号类型,我们给出了北斗GEO和NGEO卫星在星历、粗/精时间和接收机位置辅助条件下的卫星信号载波频率和码相位的计算方法,并在此基础上重点研究了计算得到的载波频率和码相位的不确定度,最后针对粗时间和精时间这两种典型的辅助定位技术进行了算例分析。结果表明,在粗时间和精时间辅助前提下,北斗GEO卫星和NGEO卫星的载波频率搜索范围比没有辅助信息时的搜索范围减小了近20倍,接收机时钟的频偏和接收机的动态是引起捕获过程中频率搜索不确定度的两个主要因素,辅助位置精度对NGEO载波搜索空间较GEO载波搜索空间影响大。在精时间辅助前提下,捕获搜索的码相位较其他方式减小了近20倍。并认为引起码相位不确定度的两个重要因素是辅助时间和辅助接收机位置的精度。
参考文献
[1] 汶晓勇, 肖越. GPS 和 A-GPS 技术研讨[J]. 通信技术, 2011, 44(8): 76-78
[2] 丁翔宇. GPS 卫星导航定位技术的新进展[J]. 全球定位系统, 2008, 33(3): 46-49
[3] 严昆仑, 章红平, 张提升, 等. AGPS 系统原型设计与性能评估[C]//第四届中国卫星导航学术年会论文集-S5 卫星导航增强与完好性监测, 2013
[4] 李显, 吴美平, 张开东, 等. 导航卫星速度和加速度的计算方法及精度分析[J]. 测绘学报, 2012, 41(6): 816-824
[5] VAN D F, ABRAHAM C. Coarse-Time AGPS; Computing TOW From Pseudorange Measurements, and the Effect on HDOP[C]//in Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2007), 2001: 357-367
