纯电动汽车动力传动系参数匹配及仿真
2016-02-29孙景伦孙跃东
孙景伦,周 萍,孙跃东
(1.上海理工大学 机械工程学院,上海 200093;2.上海理工大学 机械工业汽车底盘机械零部件强度与可靠性评价重点实验室,上海 200093)
纯电动汽车动力传动系参数匹配及仿真
孙景伦1,2,周萍1,2,孙跃东1,2
(1.上海理工大学 机械工程学院,上海200093;2.上海理工大学 机械工业汽车底盘机械零部件强度与可靠性评价重点实验室,上海200093)
摘要为实现纯电动汽车传动系传动比与驱动电机的合理匹配,提出了一种基于MOGA-Ⅱ遗传算法的多目标优化方法。根据配备两挡变速器的某纯电动汽车的整车参数和设计要求,对其动力传动系统主要部件驱动电机及动力电池进行了匹配和选型。基于GT-drive软件搭建整车仿真模型进行仿真分析并验证了匹配的合理性。利用多目标优化软件modeFRONTIER进行了传动系传动比优化。优化结果表明,纯电动汽车的一次充电续驶里程及原地起步加速时间分别提高了5.5%和2.9%。
关键词纯电动汽车;动力传动系;参数匹配;仿真优化
Parameters Matching and Simulation for Power Train of Pure Electric Vehicle
SUN Jinglun1,2,ZHOU Ping1,2,SUN Yuedong1,2
(1.School of Mechanical Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;
2.Key Laboratory of Mechanical Industry for Automobile Chassis Mechanical Parts Strength and Reliability Evaluation,
University of Shanghai for Science and Technology,Shanghai 200093,China)
AbstractA dual-objective optimization method based on MOGA-Ⅱ genetic algorithm is proposed for the ratio of power train to be matched reasonably to the drive motor of pure electric vehicle.Drive motor and power battery of power train are matched for a two-speed pure electric vehicle based on the vehicle parameters and design requirements.The GT-drive vehicle simulation models are built to analyze and validate the rationality of the matching.The transmission ratios are optimized by multi-objective optimization software modeFRONTIER.The results show that the driving range of a single charge and initial acceleration time is increased by 5.5% and 2.9% respectively by optimization.
Keywordspure electric vehicle;power train;parameters matching;simulation optimization
纯电动汽车(Pure Electric Vehicle,PEV)正逐步成为未来汽车的主要发展方向[1]。随着纯电动汽车的驱动电机、动力电池等关键技术的进步,其驱动系统的合理匹配及传动系统的传动比优化,依然是提高整车动力性及经济性的重要手段[2]。本文以处于开发初期的某纯电动汽车为例,对动力传动系的主要部件进行参数匹配,建立整车仿真模型进行仿真分析验证,并对传动系统的传动比进行优化,以提高整车性能。
1整车参数及性能要求
目前,纯电动汽车正沿着高速纯电动汽车及低速纯电动汽车两条主线发展[3],本文是基于某高速纯电动汽车进行研究与开发的。其整车主要参数及性能指标要求如表1所示。
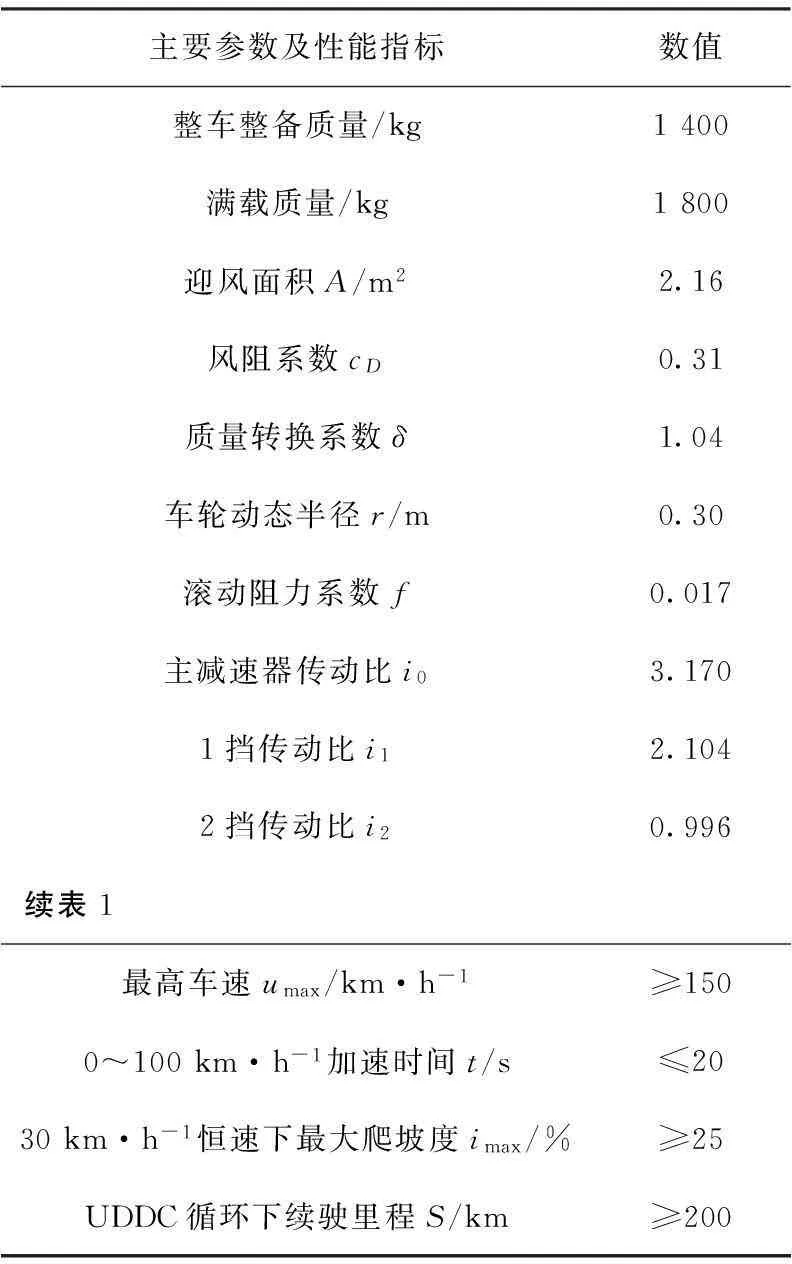
表1 整车主要参数及性能指标要求
2动力传动系参数匹配
2.1 驱动电机的参数匹配
与传统内燃机汽车不同,PEV由蓄电池供电,电机驱动车轮行驶[4]。驱动电机的特性参数主要有额定功率、峰值功率、额定转速、最大转矩等,驱动电机的类型对PEV的性能也有一定程度的影响[5]。
优化设计中一般以保证PEV预期的最高稳定车速来初步选择电机的驱动功率,即驱动电机的额定功率应大于等于PEV在水平良好路面上以最高稳定车速匀速行驶的阻力功率[6],即

(1)
式中,pe为额定功率;ηT为总传动效率,这里取92%。
为满足PEV在某一恒定速度下的爬坡性能要求,驱动电机的峰值功率应满足[7]

(2)
式中,αmax为ui=30km·h-1恒定速度下的最大爬坡角度,这里αmax≈14.04°。
另外,为满足PEV加速性能要求,峰值功率应满足[8]

(3)
式中,uj为车辆加速的末速度。
所以根据式(1)~式(3),驱动电机的峰值功率pmax应满足
pmax≥max(pe,pmax1,pmax2)
(4)
还需注意的是,峰值功率和额定功率之间存在如下关系[9]
pmax=peλ
(5)
式中,λ为过载系数,一般取1~3。
驱动电机的最高转速由最高车速决定[10],即
(6)
驱动电机的额定转速由汽车巡航速度un决定,即
(7)
驱动电机的最大转矩由汽车实现最低稳定车速来达到最大爬坡度所克服的阻力转矩决定,即

(8)
2.2 动力电池的参数匹配
动力电池的参数匹配主要考虑电池组的容量、电压、能量密度及电池的类型等。确定电池组最小数目的方法是使电池组最低工作电压大于等于电机最小工作电压,电池组最大数目由电池组最大输出功率大于等于驱动电机的最大功率的约束条件来确定。而电池组的容量是由PEV的续驶里程来限制的[11],如式(9)所示
(9)
式中,E为电池组的容量;e为单位能耗行驶的里程;S为续驶里程;η为放电深度(DOD),这里DOD取90%。
综上所述,根据理论计算及权衡,为目标车辆所匹配的驱动电机及动力电池的指标参数如表2所示。
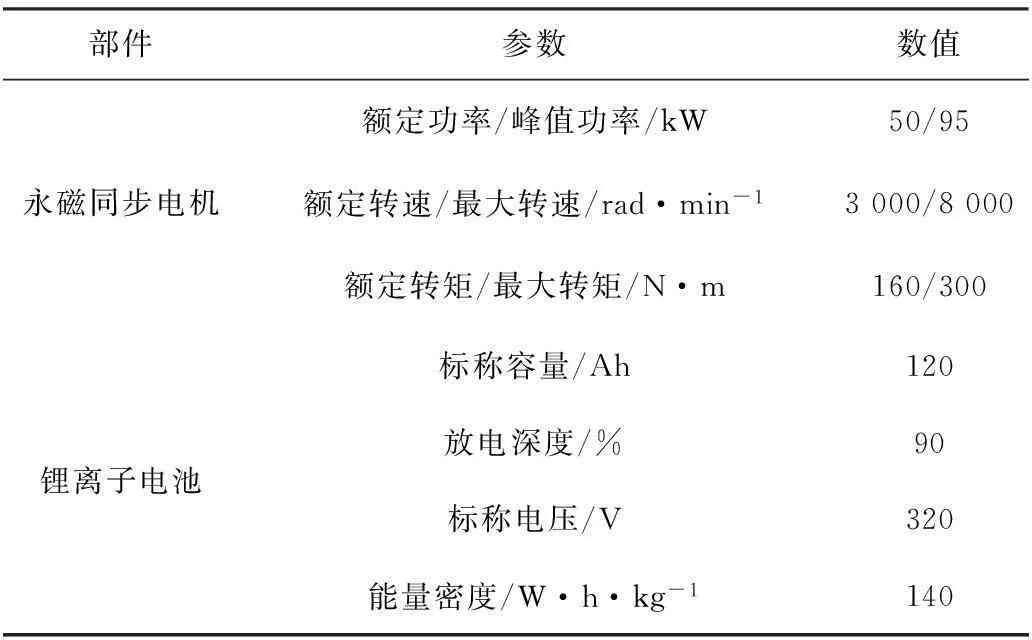
表2 电机及电池组主要参数
3整车性能仿真及验证
根据计算任务的不同以及性能优化的指标要求,利用整车性能仿真软件GT-drive分别建立了静力学、动力学及运动学模型,其整车静力学仿真模型如图1所示。利用其进行整车动力性及经济性计算分析,得到0~100 km·h-1的原地起步加速时间及1挡爬坡度等仿真结果。
对原车进行试验,并将仿真分析中得到的0~100 km·h-1的原地起步加速时间及1挡爬坡度曲线与实车试验曲线进行了对比,分别如图2及图3所示。目标车辆0~100 km·h-1的加速时间为19.1447 s,30 km·h-1恒速下的爬坡度为32.43%,UDDC循环下一次充电续驶里程为222.19 km,均满足设计目标,进一步说明了为该车动力传动系选型的驱动电机及动力电池是合适的。
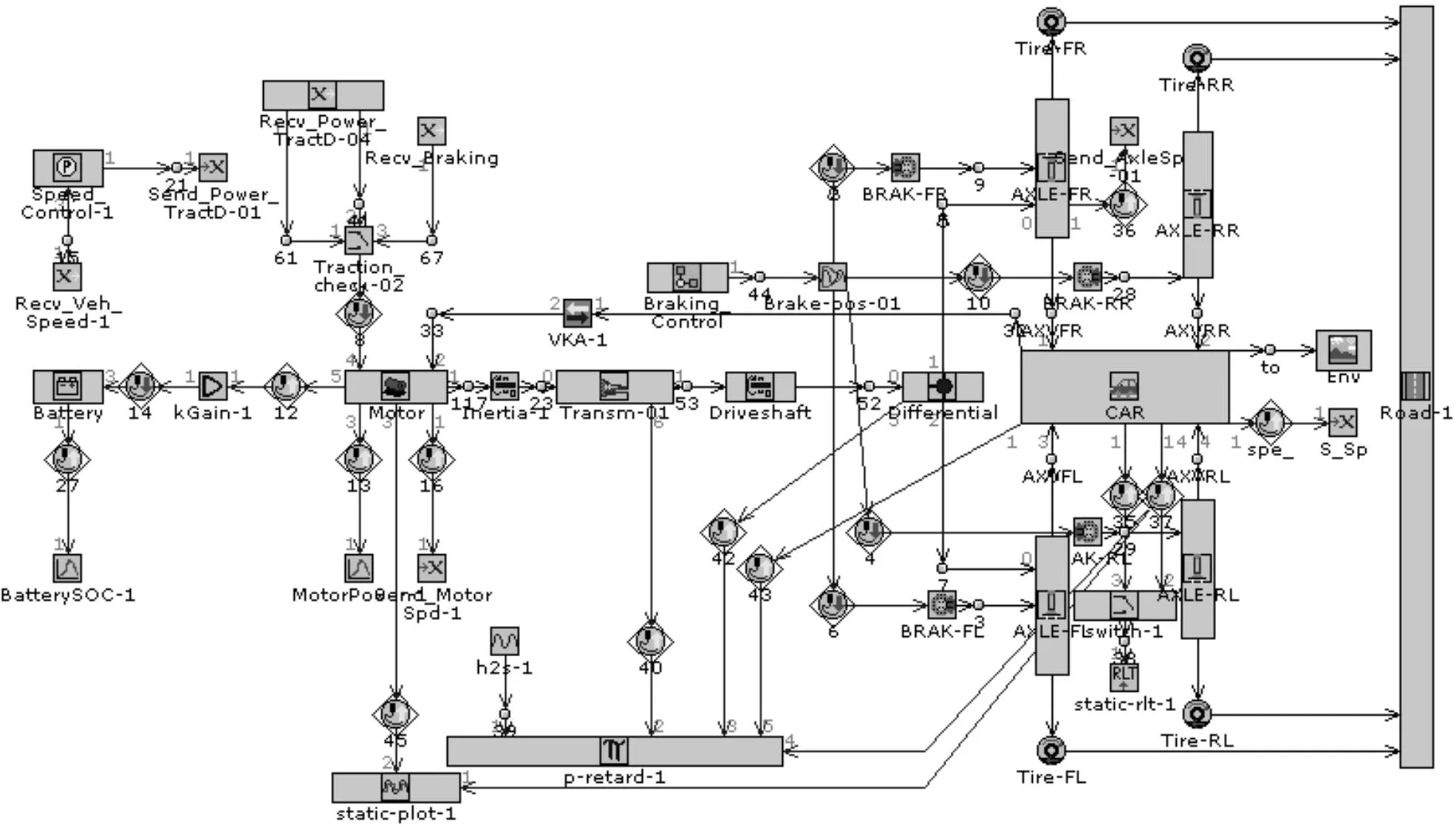
图1 PEV整车静力学仿真模型

图2 仿真及试验的加速时间曲线

图3 仿真及试验的爬坡度曲线
将仿真结果与试验结果对比分析,其分析结果如表3所示,不难发现,仿真结果与实车试验结果各个性能指标偏差的绝对值都在2%以内,验证了整车仿真模型具有较高的精确度。
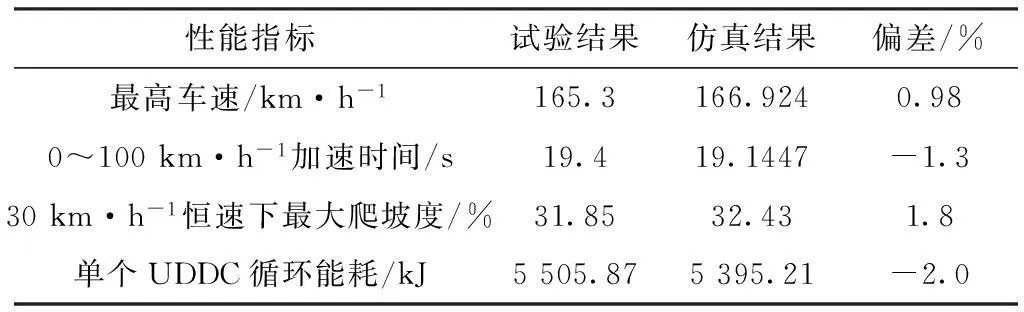
性能指标试验结果仿真结果偏差/%最高车速/km·h-1165.3166.9240.980~100km·h-1加速时间/s19.419.1447-1.330km·h-1恒速下最大爬坡度/%31.8532.431.8单个UDDC循环能耗/kJ5505.875395.21-2.0
4目标车辆的性能优化
在目标车辆的电机及电池组合理选型之后,传动系的总传动比是影响整车动力性及经济性的主要因素。考虑到电机具有低速恒转矩、高速恒功率及良好的响应速度等特性,在PEV中变速器的挡位数一般不超过3挡,本文为该车型选配了能够减小电机最大转矩、优化电机的工作转速区间、提高传动系效率的两挡自动变速器[12]。
4.1 设计变量及目标函数的确定
传动系总传动比包括主减速器传动比i0和各挡传动比ii,因此选取优化设计变量为
X=[x1,x2,x3]T=[i0,i1,i2]T
(10)
选取0~100 km·h-1原地起步加速时间作为动力性目标函数以及基于UDDC循环工况的能量消耗量作为经济性目标函数,所以目标函数为
MinF(X)={Time(X),Energy(X)}
(11)
4.2 优化约束条件的确定
本PEV中优化传动系参数的约束条件主要有动力性约束及传动比约束。
4.2.1动力性约束
(1)最高车速限制。最高车速ua须大于所要求的最高车速下限umax,即
ua>umax
(12)
(2)最大爬坡度限制。最大爬坡度ia要大于所要求的最大爬坡度的下限imax,即
ia>imax
(13)
4.2.2传动比约束
(1)最大传动比下限。一般通过车辆的最大爬坡度和电机的最大转矩确定最大传动比的下限imax0=i0i1为

(14)
(2)最大传动比上限。根据最大驱动力必须小于等于驱动轮与路面之间的附着力,可确定最大传动比的上限imax1为[6]
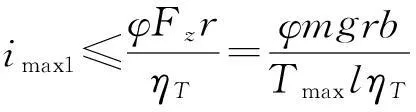
(15)
(3)最小传动比下限。最小传动比的下限imin0=i0i2由车辆按最高速度行驶的阻力限定

(16)
(4)最小传动比上限。根据车辆最高稳定车速和电机最高转速限定最小传动比imin1为
(17)
(5)主减速器传动比的上限。为避免安装过程中主减速器与其他零件发生干涉,一般限制主减速器传动比i0上限
i0≤5.8
(18)
(6)2挡传动比下限。根据超速挡传动比的范围一般为0.7~0.8,限制2挡传动比i2下限
i2≥0.7
(19)
(7)相邻传动比约束。为避免换挡困难,设置相邻传动比约束为
(20)
4.3 优化模型及策略
传动系参数的优化属于非线性约束优化问题,传统的多目标优化多是采用加权的方法将多个目标集合成一个单目标来优化,但是在优化过程中确定各个目标的加权值较困难。多目标优化平台modeFRONTIER提供了多种优化算法,且提供了与GT-suite等各种CAD/CAE软件的无缝接口。本文是将建立的整车仿真模型嵌套入modeFRONTIER环境中,以0~100 km·h-1原地起步加速时间及单个UDDC循环中动力电池的能耗为优化目标,并采用DOE实验设计和改进的遗传算法(MOGA-Ⅱ)相结合的方法进行传动比优化。建立的模型如图4所示。

图4 PEV传动比优化模型
4.4 优化结果分析
在联合仿真环境中,通过DOE产生10个初始种群,并采用MOGA-Ⅱ优化算法进化20代,产生了200个优化方案,在这些优化方案中有128个可行解,其种群分布如图5所示。
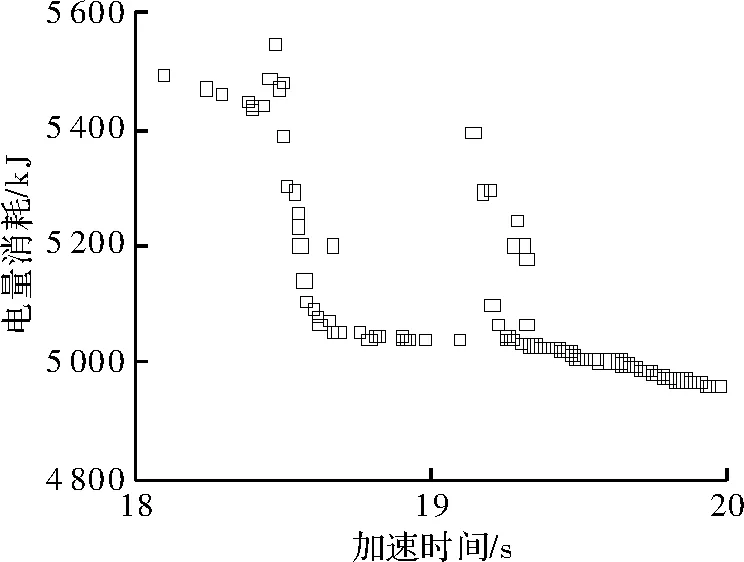
图5 优化生成的种群分布
在优化计算后生成的一组Pareto最优解中,根据实际情况和目标需要选取一组较为理想的传动比,优化前后的结果如表4所示。
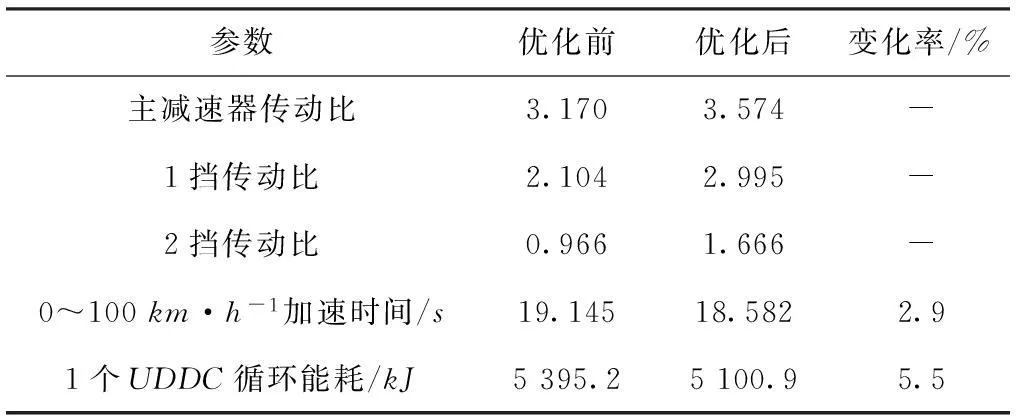
表4 优化前后结果对比
经对比发现,通过优化传动比,0~100km·h-1原地起步加速时间降低了2.9%,单个UDDC循环中整车能耗降低5.5%,UDDC循环下一次充电续驶里程提高至234.41km。说明目标车辆的动力性及经济性均有一定程度的提高。
5结束语
(1)在数学计算模型的基础上,根据整车参数和性能指标的要求,为目标车辆匹配并选型了比较理想的驱动电机和动力电池。
(2)利用GT-drive搭建了静力学、运动学及动力学整车仿真模型,并将仿真计算结果与实车试验结果进行对比分析,验证了对动力传动主要部件的选取是合适的,同时也证明了整车仿真模型的精度。
(3)通过modeFRONTIER和GT-suite联合仿真并采用多目标优化设计,使PEV的动力性及经济性均得到一定程度的改善,验证了基于仿真分析的优化设计方法效率高且能节约时间和金钱成本。
参考文献
[1]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2004.
[2]RenQinglian,CrollaDavid,MorrisAdrian.Effectofgearedtransmissionsonelectricvehicledrivetrains[C].Tianjin:ASMEInternationalDesignEngineeringTechnicalConferenceandComputersandInformationinEngineeringConference,2009.
[3]殷承良,张建龙.新能源汽车整车设计[M].上海:上海科学技术出版社,2013.
[4]周胜,周云山.纯电动汽车动力匹配及计算仿真[J].计算机仿真,2013,30(2):135-139.
[5]周宝华,秦大同,胡明辉,等.两挡电动汽车动力传动系的参数设计[J].重庆大学学报,2011,34(1):1-6.
[6]余志生.汽车理论[M].北京:机械工业出版社,2009.
[7]周兵,江清华,杨易.两挡变速器纯电动汽车动力性经济性双目标的传动比优化[J].汽车工程,2011,33(9):792-797.
[8]李伟,阴晓峰,武小花.基于电机效率优化的纯电动汽车换挡规律[J].机械传动,2014,38(1):150-153.
[9]王小军.电动汽车传动系统参数匹配及动态特性研究[D].长沙:湖南大学,2013.
[10]钟磊,高松,张令勇.纯电动轿车动力传动装置参数匹配与动力性仿真[J].山东理工大学学报,2010,24(1):78-80.
[11]王小军.电动汽车传动系统参数匹配及动态特性研究[D].长沙:湖南大学,2013.
[12]周晶晶.纯电动汽车两挡自动变速器试验与仿真[D].长沙:湖南大学,2014.
作者简介:孙景伦(1989—),男,硕士研究生。研究方向:研究方向:汽车动力传动系匹配。
基金项目:上海市科委科研基金资助项目(11140502000)
收稿日期:2015- 05- 12
中图分类号U463.2
文献标识码A
文章编号1007-7820(2016)01-051-05
doi:10.16180/j.cnki.issn1007-7820.2016.01.014
