基于PSD器件的激光位移测距系统设计※*
2016-02-26吴炜严利平
吴炜,严利平
(浙江理工大学 信息学院,杭州310018)
基于PSD器件的激光位移测距系统设计※*
吴炜,严利平
(浙江理工大学 信息学院,杭州310018)
摘要:提出了一种基于滨松S3931型号PSD器件和飞思卡尔Kinetis K60系列微控制器的激光位移测距系统。该测距系统主要利用了光学三角测量法的工作原理,将被测位移量通过光路系统转换为相应的微弱电信号,再由微弱电信号处理电路,经过放大、滤波、信号处理、A/D采集等一系列处理后,转换为实际位移量,并在LCD液晶显示屏上显示。本系统能够实现±5 mm范围内位移的快速测量,测量精度为30 μm,可以用于精密仪器尺寸测量、物体表面平整度检测等。
关键词:PSD;S3931;激光测距;光学三角测量法
引言
在当今社会中,测量技术已经成为现代科学技术中不可或缺的一部分。其中,位移测量技术应用范围十分广泛,是测量技术中主要的组成部分。一种以光电位置敏感探测器PSD(Position Sensitive Detector)为核心的新型、高精度、高灵敏度、非接触式的光学测量系统,已经成为新型测距法的研究热点。它具有抗干扰强、实时性好、精度高的特点,同时具有不受外界湿度、磁场、强电等环境因素影响的优点,已经逐渐代替传统测量方法,具有十分广阔的应用前景。
1三角测距法原理及光路设计
由于光学三角测距法具有精度高、非接触、结构简单、抗干扰强等一系列的特点,被广泛应用于几何测距领域。根据入射光线与被测物表面之间夹角的不同,可以分为直射式三角测距法与斜射式三角测距法。在直射式三角测距法中,PSD接收到的是被测物表面的漫反射光,比较适用于表面不太粗糙的物体,同时由于直射式所产生的激光光斑比较小,整体系统的结构能够做到小而紧凑[1],因此本文采用直射式三角测距法。
图1为基于PSD的直射式三角测量法激光测距的光路原理图。激光器发射出的光斑照射到被测物体上,透镜接收被测物体表面漫反射的光,并聚焦到PSD器件的敏感区域,当被测物体从初始位置M处移动到位置M'处时,反射光斑从PSD位置的O′处移动到A′处。
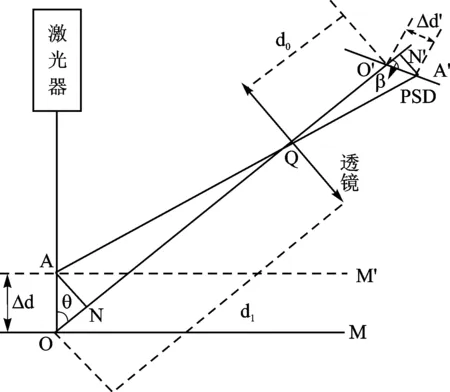
图1 三角测量法光路原理图
由图1中的几何关系以及ΔANO∽ΔA′N′O′的关系可以推导出:
(1)
其中,Δd为被测距离,d0为物距,d1为像距,β为主光轴与PSD夹角,θ为入射光线与反射光线的夹角。
d0、d1、β、θ均为已知量,因此只要求出光斑在PSD上的位移量Δd′,就可以求出位移量Δd。
为了能在PSD表面上得到清晰的成像,并且在被测物移动的过程中物点与像点能够始终满足成像公式,光路系统需要满足Scheimpflug理想成像条件。因此,PSD所在平面、接收透镜所在平面和激光光轴需要相交在同一点,如图2所示。
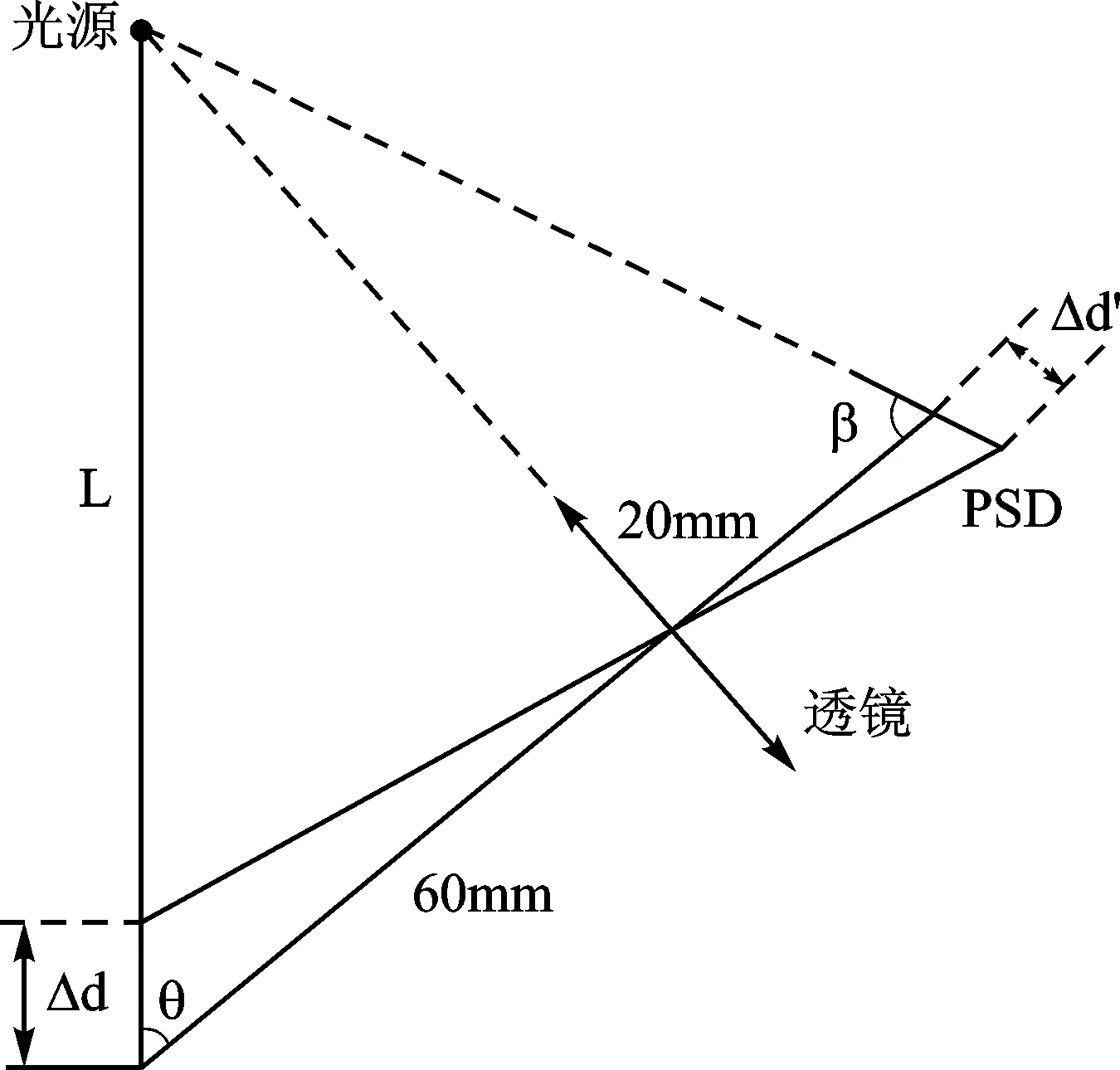
图2 Scheimpflug成像条件光路图
图2中L表示激光光源与被测物初始位置的距离。同时,考虑到S3931型号PSD的敏感区大小为1 mm×6 mm,本系统的检测范围为±5 mm。因此,当被测物移动最大距离为5 mm时,光斑还应成像在PSD的敏感区,即此时的Δd′应小于3 mm。
在实际中,由于光斑成像在PSD边缘附近时,位移与输出信号的线性度变差,因此本文选择PSD器件中心处作为有效敏感区,当被测物移动最大距离为5 mm时,Δd′应小于1.5 mm。本文选择的透镜为f=15 mm的凸透镜,选定物距d0=60 mm,像距d1=20 mm。
根据上述所讨论的情况及Scheimpflug成像条件,可以列出与测距系统光路参数x、β、θ有关的方程。将式(1)进行移项变换,将Δd=5 mm、d0=60 mm、d1=20 mm代入到公式(1)中,可以得到:
(2)
此外,根据图2光路图中的几何关系可以得到:

(3)

(4)
为了选择合适的系统光路各部分参数,本文借助MATLAB来计算式(2)~(4)中的各参数。由于对于每一个不同取值的θ、β、Δd′和L都有唯一解,因此本文利用枚举法,将θ的取值(36°~64°,间隔1°),代入到方程组中去,在结果中选择符合实验条件(即Δd′<1.5mm)的参数取值。
基于PSD激光测距系统各参考略——编者注。有许多组参数符合Δd′<1.5mm这一要求,但是当Δd′过小时,光斑在PSD敏感面上的移动范围也会变得十分小,使得位移测量分辨率明显降低。同时,如果θ的角度过大,激光光源到被测物距离L的增大会使得系统变得过于庞大,最终经过比较,本文最后选定的光路部分的参数为θ=48°、β=73°、L=89.7mm。
2一维PSD工作原理
图3为PSD的横截面示意图,P层是光敏层,当激光照射在P层表面上时,在入射位置表面下就会产生与光强成比例的电荷,产生的电荷通过P层向两端电极流动形成光电流。由于P层的电阻是均匀的,所以由两极输出的电流分别与光点到两极的距离成反比。
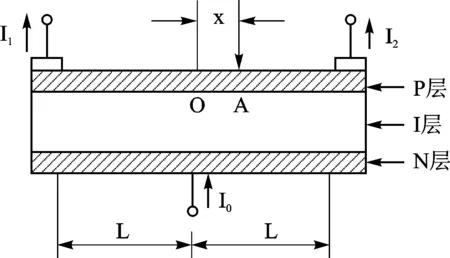
图3 PSD横截面示意图
假设光斑照射在光敏层的A点处,照射点距光敏层中点O的距离为x,假设光敏层总长度为2L,那么可以根据电流与光点到两极的距离成反比这一关系得到:
(5)
其中,I1、I2为PSD极点输出电流,L为PSD有效敏感面长度。
由式(5)可知,只要测得I1、I2、L,就能求出光斑在PSD上的位置。本文选择的PSD器件为日本滨松公司所生产的S3931,这款PSD具有优秀的位置探测能力,可靠性高,光敏面积大小为1mm×6mm,分辨率为0.3μm,光谱响应范围为320~1100nm,峰值波长为920nm。
3激光传感器信号处理电路
由于本系统所采用的位置敏感传感器PSD的输出信号十分微弱,饱和输出光电流只有100μA,因此需要设计前置放大电路对信号进行进一步放大,为了抑制干扰信号,还需要设计相应的滤波电路。根据式(1)可知,光斑在PSD敏感面上的位移量Δd′与(I1+I2)/(I1-I2)成正比,因此还需要设计加法电路和减法电路,信号处理电路总体框架如图4所示。
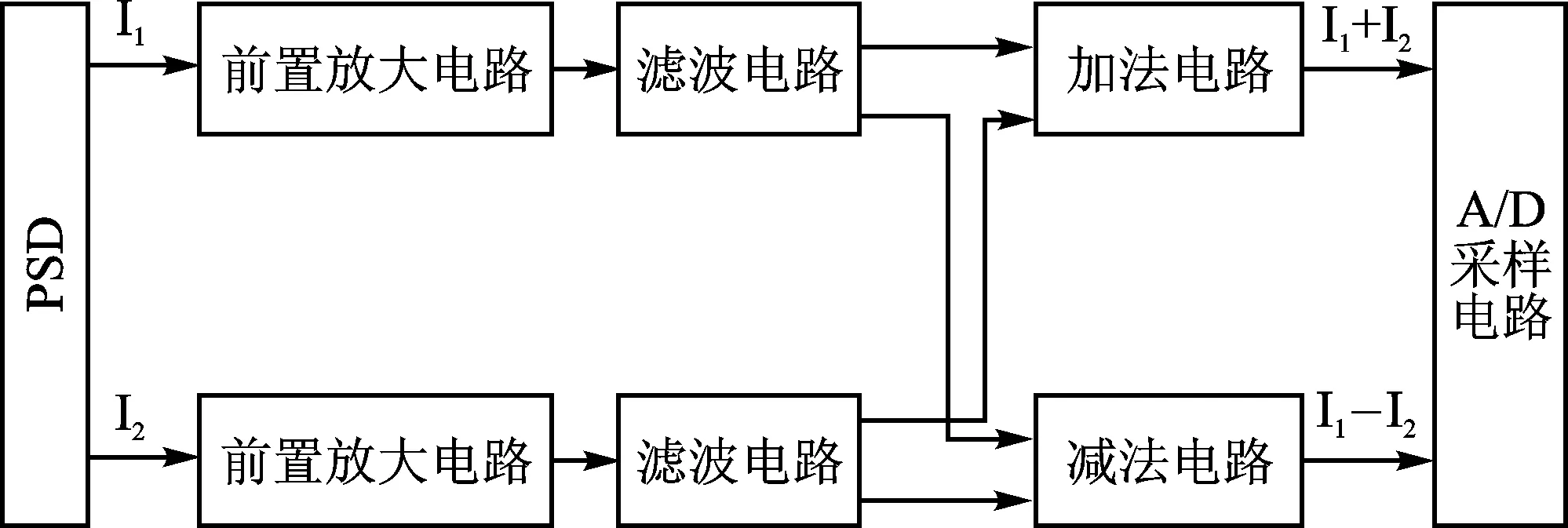
图4 PSD信号处理电路示意图
为了减小电路布局所带来的影响,选择将信号处理电路进行PCB刻板,进一步提高电路的稳定性、整体性。先利用Altium Designer软件对整体电路进行合理的PCB布局,再利用腐蚀机对其进行腐蚀处理。信号处理电路实物图如图5所示。

图5 信号处理电路实物图
4激光位移测距系统软件设计
软件部分以IAR作为开发环境,对K60微控制器进行软件编程。本系统中,K60主控芯片主要需要实现的功能为:在考虑采样频率的情况下,以尽可能小的时间间隔对输出信号进行采样,来达到接近实时测量的目的,同时利用K60本身的软件除法运算功能,来代替模拟除法器,进一步简化系统结构。
此外,由于K60微控制器只能采样大于零的模拟信号,当(I1-I2)为负值时,需要采集(I1-I2)的反相信号,因此K60单片机的A/D模块的3个通道分别采集3个模拟量,分别是AD0通道采集信号(I1+I2)、AD1通道采集信号(I1-I2)、AD2通道采集信号(I1-I2)的反相值,系统软件流程图如图6所示。
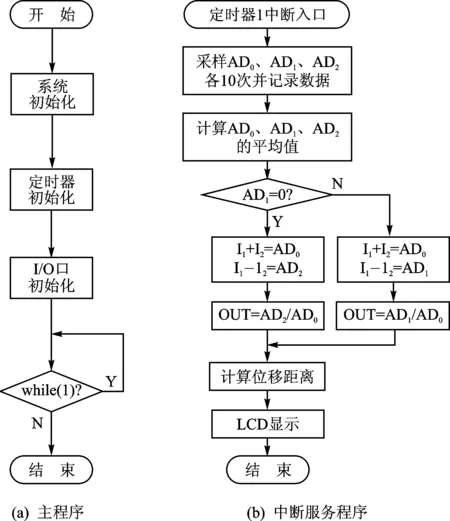
图6 软件流程图
5系统测试与结果
为了验证基于PSD的激光测距系统可行性和有效性,进行了位移测量实验。实验装置如图7所示。位移测量值由螺旋测微器移动平台提供,该移动平台最小移动间隔为0.02 mm。通过手动旋转螺旋测微器来带动被测物前后移动,通过测距系统测量被测物的位移距离,将测量结果与实际位移距离进行比较,计算测量误差。
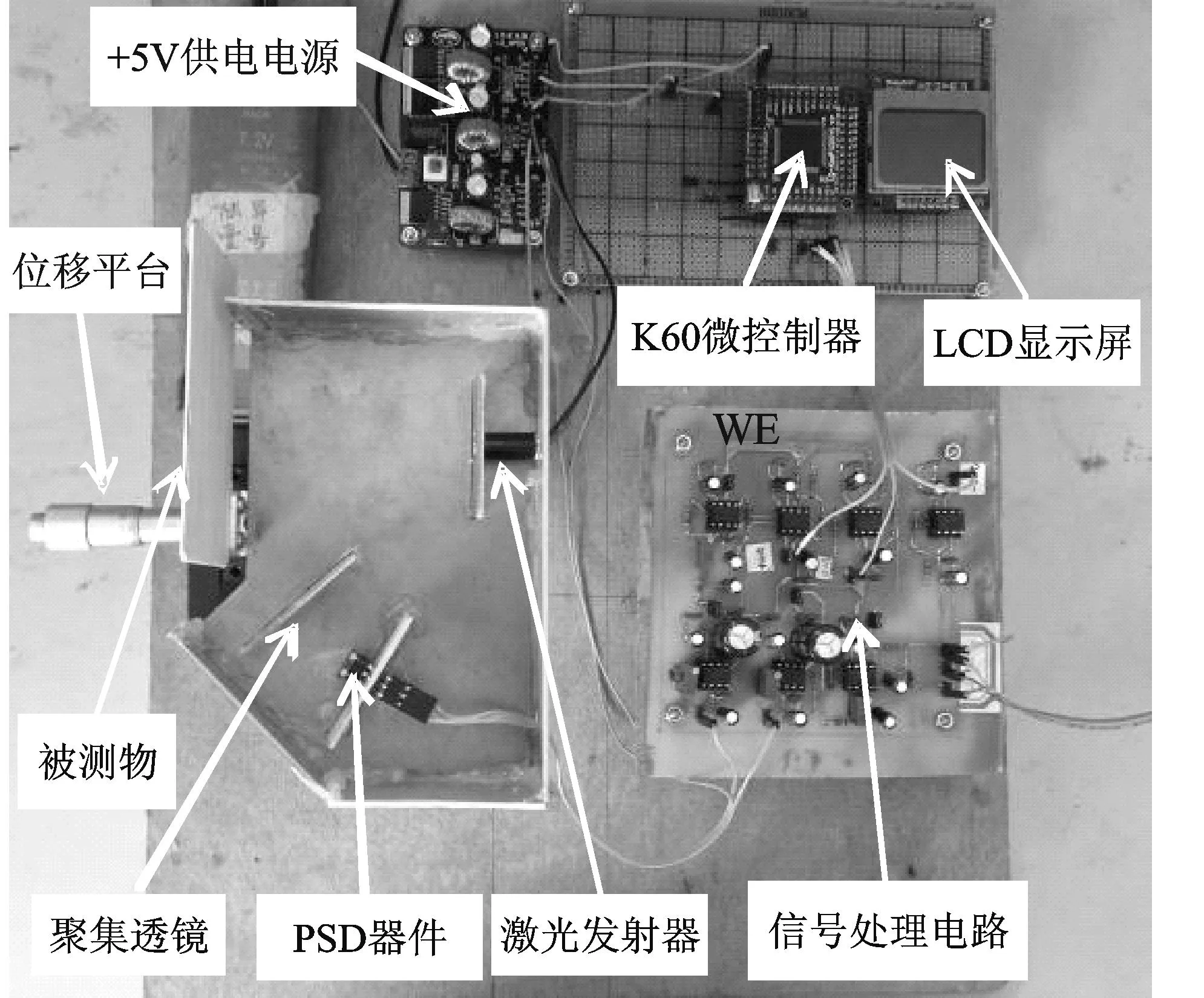
图7 基于PSD激光位移测距系统实物图
由于在制作测距系统实物时,与理论设计的参数存在一定的偏差,因此测距结果不能用理论公式计算得到,本文采用标定拟合法来得出最终测距结果的计算公式。因此首先需要进行标定实验,对位移计算公式中的系数进行确定。在实验1中,被测物体每次位移0.2 mm,然后记录相对应的(I1+I2)和(I1-I2)的值,利用Origin软件将记录的数据做成折线图,其中x轴为实际位移值,y轴为(I1-I2)/(I1+I2),测量结果如图8所示。
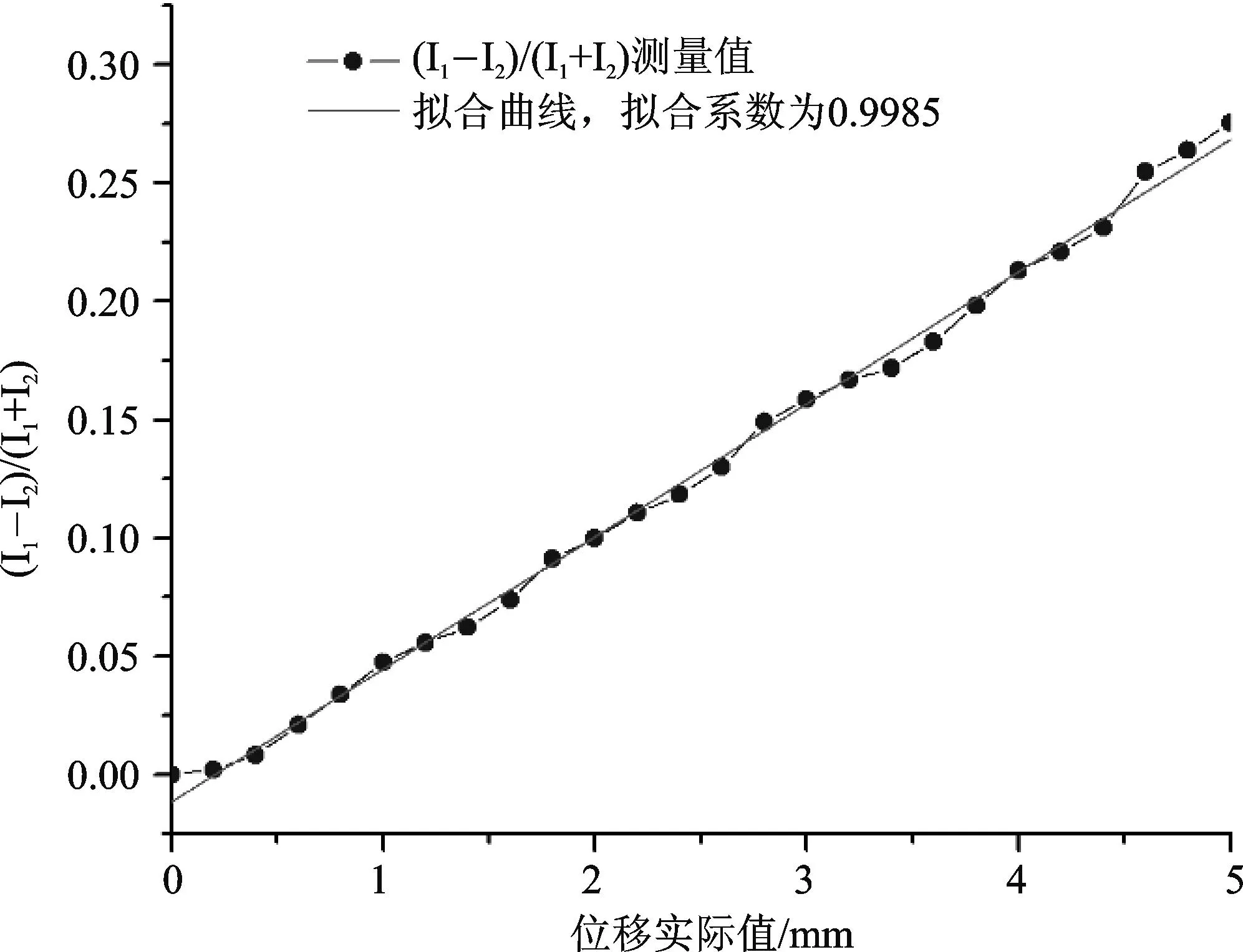
图8 拟合实验测量结果
然后通过软件计算并画出拟合曲线,该曲线拟合系数为0.9985,最终得出位移计算公式为:
(6)
为了测试位移系统的测量误差,进行了第二项实验,在实验2中,被测物表面每次步进0.1mm,将测得的(I1+I2)和(I1-I2)代入式(6),在0.2~4.7mm和-4.8~-0.3mm范围内的位移测量结果分别如图9和10所示。实验结果表明,本文研制的激光位移测距系统测量精度为30μm。
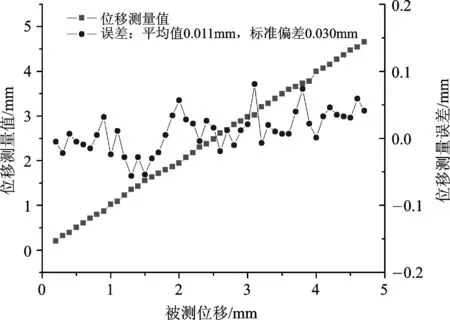
图9 0.2~4.7 mm范围内位移测量结果
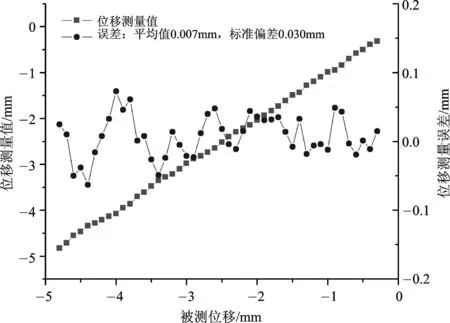
图10 -4.8~-0.3 mm范围内位移测量结果
结语
本文对基于PSD的激光位移测距系统进行了深入的研究与探讨,根据光学三角测量法工作原理,对系统光路部分进行了设计。通过对PSD输出信号特性的分析,设计出了合理的信号处理电路。在进行相关测量实验之后,对测量结果所产生的误差进行了分析,对系统进行进一步的优化,最终设计出了完整的激光位移测距系统,在±5 mm范围内位移测量精度为30 μm。
在本文研究的基础上,还可以通过以下几方面的优化进一步提高系统的测量精度和实用性:选择准直性更好的红外激光发射器,减少光斑过大所带来的不良影响;选用纹波更小的电源对系统进行供电;在信号处理电路中增加反馈电路,以适用于不同反射能力的被测对象;系统光路部分设计得更加小型和紧凑。

参考文献
[1] 侯金龙. PSD 激光三角测量系统的研究 [D] .武汉:华中科技大学,2005.
[2] 张华.基于PSD的测距系统研究[D] .杭州:浙江大学,2005.
[3] 普晋亚.PSD激光三角测距系统设计[D] .武汉:华中科技大学,2008.
[4] Freescale Kinetis MK60 Datasheet [EB/OL].(2013-09)[2015-07].http://www.freescale.com.
[5] ADI.OP07 Datasheet [EB/OL].(2011-07) [2015-07]. http://datasheet.eepw.com.cn/datasheet/show/id/1719712.
[6] Makymen A.Linear and sensitive CMOS position-sensitive photo detector[J] .Electronics Letters,1998(12).
吴炜(本科生),主要从事嵌入式系统应用方面的研究。
Laser Displacement Ranging System Based on PSD※
Wu Wei,Yan Liping
(School of Information Science and Technology,Zhejiang Sci-Tech University,Hangzhou 310018,China)
Abstract:A laser displacement ranging system based on Hamamatsu S3931 model PSD device and Freescale Kinetis series microcontroller K60 is proposed.The ranging system mainly uses the principle of optical triangle method,which converts the measured displacement into the corresponding weak electrical signals using the optical path system.After amplification,filtering,signal processing,A/D sampling and a series of processing,the signals are converted into the actual displacement and displayed on the LCD screen.The experiment results show that the system achieves a displacement measurement range of ±5 mm and the measuring accuracy of 30 μm.It can be used for the size detection of precision instruments,the roughness measurement of surface and so on.
Key words:PSD;S3931;optical laser ranging system;optical triangle method
收稿日期:(责任编辑:杨迪娜2015-07-08)
中图分类号:TH711
文献标识码:A
基金项目:*国家级——激光合成波长干涉测量空气折射率的方法研究(514754535)。