亚航QZ8501搜救航路GPS高程数据研究
2016-02-16王崇明张田雷张凯华
王崇明,杨 鲲,张田雷,张凯华
(1.交通运输部天津水运工程科学研究所,天津300456;2.天津水运工程勘察设计院天津市水运工程测绘技术重点实验室,天津300456)
亚航QZ8501搜救航路GPS高程数据研究
王崇明1,2,杨 鲲1,2,张田雷1,2,张凯华1,2
(1.交通运输部天津水运工程科学研究所,天津300456;2.天津水运工程勘察设计院天津市水运工程测绘技术重点实验室,天津300456)
文章针对“南海救101”轮前往爪哇海QZ8501失事区域一段330 km航路上记录的GPS数据,进行粗差剔除和小波去噪,得到平滑的GPS高程数据。根据DTU10全球海洋潮汐模型的主要分潮,预报了航路上4个站位的潮位数据,按照时间最近、距离最小的原则得到了船舶航路上的潮位。按照航路的地理坐标,提取出了DTU10全球平均海平面模型的数据。将平滑的GPS高程数据与DTU10模型数据进行比较分析,得到了推算潮位,并将推算潮位与预报潮位进行了比较分析,两者的平均差值为-0.11 m,可以满足远海水深小于200 m的区域的潮位改正需求。
GPS高程;小波分析;DTU10;预报潮位;平均海平面
2014年12月28日,亚航宣布,其航班QZ8501在爪哇海域坠毁。为支援印尼方搜救任务,“南海救101”轮赶赴印尼爪哇海域参与亚航失事飞机残骸和黑匣子的搜寻扫测任务。本次搜救采用的定位设备为高精度的星站差分GPS:Veripos LD3,水平定位精度±15 cm,高程精度±20 cm[1-2]。在前往搜救区域的航路上,记录了约13 h的GPS定位数据,数据记录的区域为中国南海南部海域,航路长度约330 km,记录航路如图1所示。

图1 船舶航路示意图Fig.1 Track line of vessel
本次记录的GPS数据是NMEA-0183标准格式的GGA语句,语句中的高程数据为GPS天线的海拔高度,即GPS天线相对于平均海平面的高度。此外,语句中还包含了地球椭球面相对于大地水准面的高度,大地水准面模型采用的是EGM2008。GPS天线高度受模型、潮汐、涌浪、船舶吃水和差分信息等影响,会出现起伏变化,即存在噪声影响,本文即对这种存在噪声影响的GPS高程数据进行研究。
本文通过GPS高程数据和DTU全球海平面模型相关数据,研究潮位的获取方法,以解决远海航路水深测量中潮汐改正难题。
1GPS高程去噪
由于船舶处于高度运转的状态中,受各种电磁设备干扰的影响,会出现收不到卫星差分信息的状况,导致GPS处于单点定位的模式,定位精度严重下降,尤其是高程方面,会出现粗差等各种误差噪声的影响,因此要对GPS的高程数据进行“去噪”,才能得到较为平滑的GPS高程数据。小波分析(wavelets analysis)理论是在傅里叶理论基础上发展起来的一种分析理论,属于泛函分析的范畴,它的优势在于可以提供傅里叶理论所无法提供的信息。小波分析方法可以分析原始信号各种变化的特性,进一步用于数据压缩、噪声去除和特征选择等。
小波分析是应用数学和工程技术的完美结合,在实际工程中的应用非常广泛,诸如计算机应用、信号处理、图像分析、非线性科学、地球科学和应用技术等。小波分析在时域和频域同时具有良好的局部化放大的性质,是一种窗口大小不变但形状、时间窗口和频率窗口都可以改变的时频局部化分析方法。它具有多分辨率分析的优良特点,而且随着信号不同,在空域以及时域取样过程中频率成分的疏密程度可以自动进行调节。由此可知,小波分析具有反映观察函数(例如信号和图像等)的任意细节并对此加以分析的特性,由于它具有这一特性,所以小波分析又被誉为“数学显微镜”[3-4]。
小波变换的基本思想是用一族函数去表示或逼近一个信号或函数。由函数h经伸缩和平移得到的一族函数

这个函数称为小波函数,式中a为伸缩因子,b为平移因子。可以根据h函数和参数a、b的选取,来进行连续或者离散的小波分析。
GPS高程数据可看作一种随时间变化的信号,对高程数据分析就是一种信号分析。包含噪声的高程数据可以建模为下式

式中:s(k)为观测得到的原始数据;f(k)为有用信号,是真实高程信号或固定误差(如船舶吃水)或两者的混合,一般表现为低频信号;ε(k)为随机噪声,一般表现为高频信号。因此,可以用门限阈值的方法,对小波系数进行处理,减小噪声部分的值,然后通过重构将信号进行恢复处理,从而达到消噪目的。
本文利用Matlab编程对原始粗差剔除后的高程信号进行小波分析,采用Daubechies小波函数(db3),进行10层分解,去除高频信号影响,重构波形,得到结果如图2所示,高程数据图形变得更加平滑,从而能有效的看出GPS高程的变化。图中坐标纵轴单位为m,横轴单位为GPS采样次数。
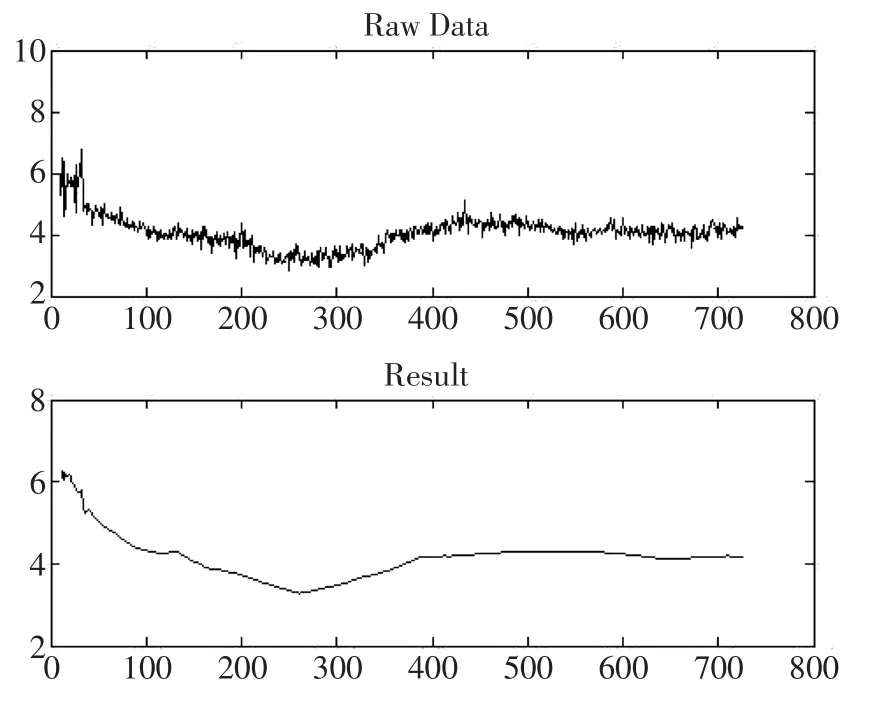
图2 小波去噪Fig.2 Smooth by wavelet
2航路潮位预报
丹麦科技大学(Technical University of Den⁃mark,DTU)开发了一系列地学模型,其中包括了全球重力场模型、全球海洋潮汐模型、全球平均海平面模型、磁力场模型、全球海洋深度模型等,这一系列模型均采用最新的多源卫星数据,具有更高的精度和准确度,而且模型数据完全公开。

图3 航路4个站位的潮位预报值Fig.3 Tide forecast of 4 stations in track line
DTU10全球海洋潮汐模型,是由AG95模型升级得到的,分辨率是0.125°×0.125°,格网数是2 881×1 441,纬度为90°S~90°N,经度为0°~360°E。这个模型是基于FES2004和响应法,利用从1992年9月~2009年9月共17 a的T/P、Jason-1和Jason-2卫星高度计资料发展起来的一个全球的大洋潮汐模型,包含8个主要分潮M2,S2,N2,K2,K1,O1,P1,Q1。此外,该模型包含2个来自GOT4.7模型的S1和M4分潮[5-6]。在中国南海中部的宽广海域中,DTU10海洋潮汐模型与验潮站调和常数进行比对,M2、S2、K1和O1等分潮的均方根偏差分别为8.36 cm、5.22 cm、7.18 cm和7.57 cm[5],因此可以认为DTU10海洋潮汐模型在南海宽广海域精度非常高。
将该船舶航路等分为6段,去除首尾两点,共计有4个点。根据这4个点的地理坐标,提取DTU10模型中的各个分潮,预报了4个点位的潮位数据,每个站位的时间均为包含航行时间在内的13 h,如图3所示。按照时间接近和距离最小的原则,根据各个站位的数据,计算航路上船舶航行每一时刻的潮位,如图4所示,从图中可以看出,船舶航行经过的航路上最大潮差约不超过1.5 m。图中坐标纵轴单位均为m,横轴单位均为时间。
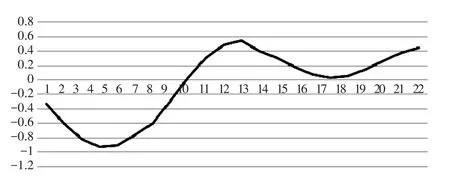
图4 船舶航路潮位值Fig.4 Tide forecast in track line
3DTU10模型数据分析
DTU10全球平均海平面模型,是DNSC08的升级版本,分辨率可达1′×1′,覆盖全球所有海域[7]。模型中的平均海平面是相对于椭球体的高度,模型数据可在网上下载。DTU10的平均海平面模型是引力场计算得到的,NMEA GPS语句中得到的高程是正高,大地水准面模型是EGM2008,该模型同样也是引力场计算得到。
根据船舶航路的地理坐标,采用Fortran语言编程提取出了航路上DTU10模型中平均海平面的高度值。
在进行各项改正之后,GPS高程数据仍然主要受模型、潮汐和船舶吃水变化的影响。考虑到船舶油水消耗不大,故吃水变化的影响可以忽略。将GPS测得的高程数据与DTU10模型数据均换算至各自的零基面,进行比对分析,如图5所示,图中F1为去噪后的GPS高程,F2为DTU10模型的高程数据,F3为两者做差的结果,即为推算得到的潮位。图中坐标纵轴单位为m,横轴单位为GPS采样次数。
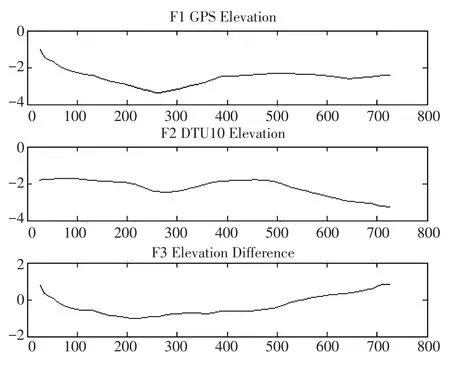
图5 高程数据分析Fig.5 Analysis of elevation data
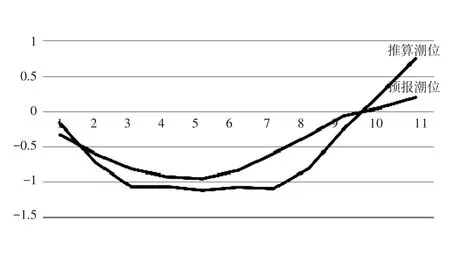
图6 潮位比对分析Fig.6 Comparative analysis of tide data
将推算潮位与采用DTU10全球海洋潮汐模型预报的潮位进行比对分析,如图6所示,图中坐标纵轴单位为米,横轴单位为时间。经过统计计算分析,两者差值的平均值为-0.11 m,差值的最大值为0.55 m,基本满足远海水深小于200 m的区域的潮位改正需求。
4结语
本文将平滑后的GPS高程数据与DTU10模型中平均海平面进行比较分析,得到了推算潮位,并将其与DTU10全球潮汐模型的预报潮位进行比对,两者的平均差值为-0.11 m,最大差值0.55 m,基本满足远海水深小于200 m的区域的潮位改正需求。因此在今后远海水深测量时,采用高精度的星站差分GPS可以直接获取潮位信息,无需额外设置验潮站,极大地方便了远海水深测量作业。
参考文献:
[1]翟清斌,张锐,张莉.Starfire差分服务介绍[J].测绘科学,2004,29(2):71-73. ZHAI Q B,ZHANG R,ZHANG L.Starfire differential GPS Services Introduction[J].Science of Surveying and Mapping,2004,29(2):71-73.
[2]冯林刚,赵永贵.星基差分GPS⁃StarFire系统[J].测绘通报,2006(11):6-8. FENG L G,ZHAO Y G.Star⁃based Differential GPS System⁃StarFire[J].Bulletin of Surveying and Mapping,2006(11):6-8.
[3]郑作亚,黄珹,卢秀山,等.小波分析理论在GPS技术中的应用[J].中国科学院上海天文台年刊,2003(24):48-55. ZHENG Z Y,HUANG C,LU X S,et al.The application of wavelet analysis theory in the technology of GPS[J].Annals of Shanghai Observatory Academia Sinica,2003(24):48-55.
[4]张勤,蒋廷臣,王秀萍.小波变换在变形监测中的应用研究[J].测绘工程,2005,14(1):8-10. ZHANG Q,JIANG T C,WANG X P.Research on application of wavelet transform to deformation observation[J].Engineering of surveying and mapping,2005,14(1):8-10.
[5]高秀敏,魏泽勋,吕咸青,等.全球大洋潮汐模式在南海的准确度评估[J].海洋科学进展,2014,32(1):1-14 GAO X M,WEI Z X,LV X Q,et al.Accuracy Assessment of Global Ocean Tide Models in the South China Sea[J].Advances in Marine Science,2014,32(1):1-14.
[6]黄辰虎,陆秀平,欧阳永忠,等.远海航渡式水深测量水位改正方法研究[J].海洋测绘,2013,33(5):10-14. HUANG C H,LU X P,OUYANG Y Z,et al.Water level correction in bathymetric survey along the open⁃sea route[J].Hydrograph⁃ic surveying and charting,2013,33(5):10-14.
[7]Andersen O B.The DTU10 Gravity field and Mean sea surface(2010)[C]//The Second international symposium of the gravity field of the Earth(IGFS2).Fairbanks,Alaska,2010.
Research of GPS elevation on searching route of QZ8501
WANG Chong⁃ming1,2,YANG Kun1,2,ZHANG Tian⁃lei1,2,ZHANG Kai⁃hua1,2
(1.Tianjin Research Institute for Water Transport Engineering,Tianjin 300456,China;2.Tianjin Key Laboratory of Surveying and Mapping for Waterway Transport Engineering,Tianjin Survey and Design Institute for Water Transport Engineering,Tianjin 300456,China)
The GPS data was recorded on the way to QZ8501 crash zone in Java Sea by"Nanhaijiu 101",and the length of the way was 330 km.The GPS data was processed to remove the gross error.The smoothed data was got after wavelet analysis.According to the DTU10 model,tide data of 4 stations was forecasted on the route.The tide of the vessel on the route was got by the nearest time and distance principle.According to the coordinate of the route, the mean sea level data of DTU10 model was got.Compared the smoothed GPS elevation with the model data,the calculated tide was obtained.Comparative analysis was performed between calculated tide and forecast tide.The dif⁃ference is-0.11 m,and it could meet the requirement of bathymetry of 200 m areas.
GPS elevation;wavelet analysis;DTU10;forecast tide;mean sea level
P 229
A
1005-8443(2016)04-0461-04
2015-04-01;
2016-03-29
王崇明(1984-),男,山东省济南市人,工程师,主要从事海洋测绘研究工作。
Biography:WANG Chong⁃ming(1984-),male,engineer.
