LabVIEW环境下基于PPI协议的轨道车辆均衡试验测控系统研制
2016-02-16鲁寨军
李 田,鲁寨军
(中南大学 轨道交通安全教育部重点实验室,长沙 410075)
LabVIEW环境下基于PPI协议的轨道车辆均衡试验测控系统研制
李 田,鲁寨军
(中南大学 轨道交通安全教育部重点实验室,长沙 410075)
轨道车辆均衡试验要求单独控制8台液压油缸升降带动工装抬升轨道车辆,抬升过程中采集和存储抬升高度及轮重数据并计算轮重减载率,抬升到指定高度时自动停止。根据试验需要研制了轨道车辆均衡试验测控系统,系统的上位机采用PC,下位机采用S7-200系列PLC,在LabVIEW环境下编写程序,调用VISA接口函数通过PPI协议建立PC与PLC通信,采集、处理位移和称重传感器数据,控制液压油缸动作,最终实现了轨道车辆均衡试验测控系统的测控功能。
PPI协议;PLC;LabVIEW;测控系统
轨道车辆均衡试验测控系统的研制重点是利用PLC进行传感器数据的采集及液压系统的控制,难点在于建立上位机(PC)与下位机(PLC)的通信。已有的通信方式有PPI、MPI、自由口、PROFIBUS现场总线、以太网、Modbus等[1],其中,PPI协议内部固化于S7-200PLC,PLC不用编程[2],相对于其他通信方式简单方便,能够满足本系统使用要求。目前,PPI协议的全部内容并未公开,但是国内外已有很多学者通过串口监视等方式找出了PPI协议的关键帧格式[3~9]。本文对其进行分析得到轨道车辆均衡试验测控系统需要的PPI协议指令,利用LabVIEW平台,调用VISA接口函数建立PC与PLC之间通信,设计集成了测控系统硬件模块,开发程序最终实现了轨道车辆均衡试验测控系统的测控功能。
1 轨道车辆均衡试验测控系统方案
轨道车辆均衡试验测控系统由8台抬升工装及2台液压站组成,1台液压站通过电磁阀单独控制4台液压油缸升降带动抬升工装动作;每台抬升工装分布于单节轨道车辆车轮下方,每台工装上安装有一个位移传感器和一个称重传感器。试验需要单独控制8个液压油缸动作抬升车轮(或同侧4个液压油缸同时动作抬升单侧车轮),位移和称重传感器同步采集抬升高度及轮重数据并计算轮重减载率,根据试验需要抬升到指定高度时自动停止。分析试验系统测控要求,建立如图1所示测控系统结构图。

图1 测控系统结构图
8台液压油缸分别由2个液压站控制,每个液压站由一个控制箱控制,控制箱内集成PLC(CPU224+ EM231模拟量扩展模块)、传感器数据采集、控制电路模块,2个控制箱由一根通信电缆与上位机PC相连,上位机在LabVIEW环境下编写程序,通过PPI协议建立PC与PLC通信,实现轨道车辆均衡试验测控系统的测控功能。
2 轨道车辆均衡试验测控系统硬件集成
轨道车辆均衡试验测控系统包括16个传感器数据采集、18个电磁阀开关控制(1台液压站由1个电磁阀控制总油压,8个电磁阀分别控制4台油缸加压、泄压)、2台液压站油泵电机电源开关控制,每台液压站各配备一个控制箱。控制箱接外部三相电源供电,由三级断路器、继电器、接触器给液压站油泵电机供电,由二级断路器从外部三相电中引220 V交流电给CPU224供电,CPU224通过输出开关量给继电器控制液压站电磁阀开关、液压站油泵电机电源开关,位移传感器和称重传感器数据通过EM231模拟量输入模块上传给CPU224,2台CPU224由一根通信电缆连接与上位机PC通信,上位机处理传感器数据并发送开关量控制指令给下位机。
3 轨道车辆均衡试验测控系统软件开发
由上文分析可知,传感器数据通过EM231模块传送到CPU224,再通过PPI协议建立上位机PC与下位机CPU的通信,将传感器数据传送给上位机。因此,首先需要将EM231采集到的传感器模拟量数据传送到CPU的变量存储器V中,在PLC中编写如图2所示程序块,将AIW0中字节传送到VW100中存储。

图2 将AIW0中字节传送到VW100中存储的程序块
将单节车辆一位侧的4台抬升工装与CPU地址为2的控制箱相连,相应的4个位移传感器和4个称重传感器分别为1、3、5、7号传感器,二位侧的4台抬升工装与CPU地址为3的控制箱相连,相应的4个位移传感器和4个称重传感器分别为2、4、6、8号传感器。一位侧位移传感器和称重传感器采集到的数据对应存储位置如表1所示,二位侧存储在地址为3的CPU中,存储位置相同。

表1 一位侧位移传感器和称重传感器数据存储位置
PLC通过输出开关量给继电器控制液压站电磁阀开关和液压站油泵电机电源开关,可直接利用PPI协议中的写指令,从上位机PC直接写入指令给下位机。两个控制箱分别控制一位侧、二位侧, CPU开关量输出端口Q0.0~Q1.1分别控制1、3、5、7(2、4、6、8)号工装加压、泄压以及液压站油压、电机电源。
3.1 轨道车辆均衡试验测控系统PPI协议指令
通过PPI协议建立上位机PC与下位机CPU224之间的通信,点对点接口(PPI)是为S7-200系统开发的通信协议。PPI是一种主从协议;主站设备发送要求到从站设备,从站设备响应;从站不主动发信息,只是等待主站的要求和对要求做出响应[10~11]。目前,PPI协议的全部内容并未公布,但是通过串口监视等方式可以找出PPI协议的关键帧格式,对其进行分析后即可根据轨道车辆均衡试验测控系统需要编写相应的指令。
3.1.1 上位机读取PLC中数据PPI协议
上位机读取PLC中数据时,按照表2中的数据格式发送读取指令给PLC,PLC返回E5,上位机再按照表3中的数据格式发送确认指令给PLC,PLC返回数据,完成读取作业(表中指令为十六进制)。

表2 PPI协议读取指令格式
按照表2中指令格式,读取单个不同传感器时,只需要将CPU地址改为该传感器所在CPU地址,将KU(核心部分)中偏移量改为传感器数据存储对应位置字地址乘以8的十六进制表示,比如:VW100—100×8=800的十六进制表示为00 03 20,将FCS(校验码)改为对应的DA到KU的和。读取一位侧所有传感器时,只需要将CPU地址改为02,将FCS(校验码)改为对应的DA到KU的和。

表3 PPI协议确认指令格式
按照表3中指令格式,不同位侧PLC返回确认指令时只需将CPU地址改为该传感器所在的CPU地址,同时将将FCS(校验码)改为对应的DA到FC的和。
读取单个传感器和多个传感器时PLC返回数据格式不同,读取单个传感器数据时将PLC返回的数据中第25、26 byte转化为十进制数,即得到了该传感器的模拟量输出;读取一位侧所有传感器数据时,PLC返回的数据中第25、26 byte转化为十进制数为1号位移传感器的模拟量输出,第27、28 byte转化为十进制数为2号位移传感器的模拟量输出,以此类推即可得到一位侧所有传感器的模拟量输出数据。
3.1.2 上位机向PLC写入数据PPI协议
上位机向PLC写入数据时,按照表3中的数据格式发送确认指令给PLC,PLC返回E5,上位机再按照表4中的数据格式发送写指令给PLC,改变CPU输出端口开关量(表中指令为十六进制)。
按照表3中指令格式,不同位侧PLC发送确认指令时只需将CPU地址改为该传感器所在CPU地址,同时将FCS(校验码)改为对应的DA到FC的和。

表4 PPI协议写入指令格式
单侧有车轮要抬升时,液压站供电、加压—Q1.1、Q1.0置1,且抬升该车轮对应的液压缸,加压—输出端口置1,停止抬升时—置0;单侧有车轮要下降时,液压站供电、泄压—Q1.1置1,Q1.0置0,且该车轮下降对应的液压缸,泄压—输出端口置1,停止下降时置0。表4中1号车轮抬升对应的一位侧CPU输出端口Q1.1、Q1.0、Q0.0置1;二位侧所有车轮抬升对应的二位侧CPU输出端口Q1.1、Q1.0置1,Q0.0、Q0.2、Q0.4、Q0.6置1,Q0.1、Q0.3、Q0.5、Q0.7置0,二进制表示为01010101。
从表4中写入指令格式可以看出,与读取指令相比,写入指令的长度要比读取指令的长度多,这是因为写1个 byte指令长度比读一个字节指令长度多5个byte,1B+5=20;功能码6C为读取,7C为写入;第17 byte 05表示写入,04表示读取,第16 byte 05表示写入的是位或者byte(即用1个 byte存储);写入长度01表示bit,02表示byte;存储器类型第26 byte 01表示V区,00表示其他,第27 byte 84表示V,82表示Q;数据形式03表示位,04表示其他;数据位数01表示1 bit,08表示8 bit;1 bit写入时,写入值为1或0,8 bit写入时,写入值为8 bit二进制数转换成的十六进制数,即二位侧所有车轮抬升对应的输出端口二进制表示01010101转换为十六进制为55。按照以上格式,需要抬升或下降某个车轮时,只需改变相应的PPI协议指令即可。
3.2 轨道车辆均衡试验测控系统程序开发
通过上述分析,已通过PPI协议建立了上位机PC与下位机PLC之间的通信,对下位机发送不同的指令即可实现读取传感器数据和控制液压站动作的功能。在此基础上,按照图3所示轨道车辆均衡试验测控系统流程图编写程序。
利用LabVIEW平台,如图4所示通过调用VISA串口配置函数建立通信,调用VISA写入函数向PLC发送指令,调用VISA读取函数从PLC中读取数据,并根据轨道车辆均衡试验测控系统需要开发操作程序,实现了单个车轮、单侧车轮抬升到指定高度自动停止,抬升过程中显示及保存位移传感器和称重传感器数据并计算轮重减载率,自动生成试验报表后下降,车轮落回原位的功能。
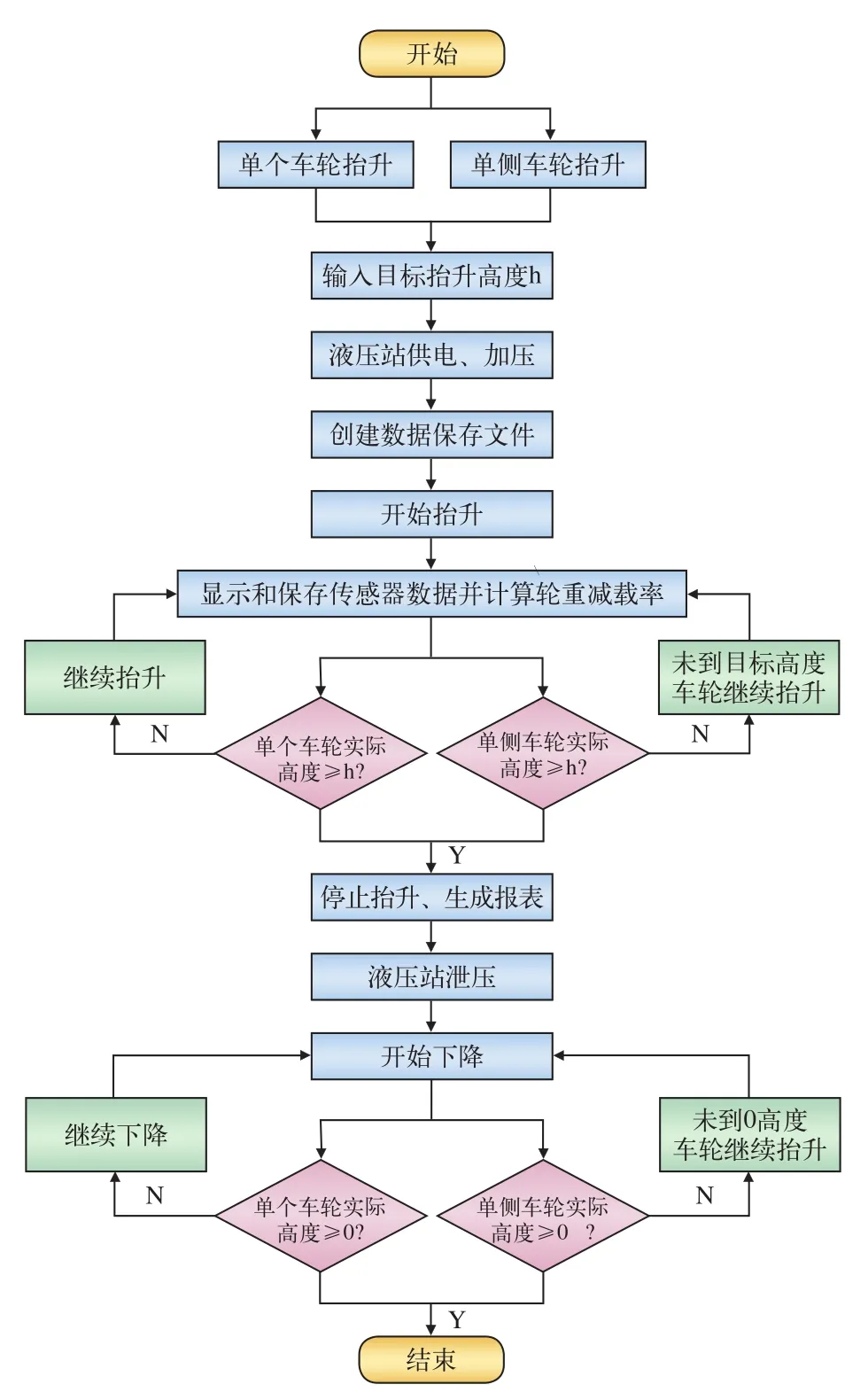
图3 轨道车辆均衡试验程序流程图

图4 VISA串口配置函数
4 结束语
本文通过分析轨道车辆均衡试验系统测控需求,从方案设计、硬件集成、软件开发3个方面介绍了测控系统研制过程,通过对PPI协议的分析,利用LabVIEW平台,调用VISA接口函数建立了上位机PC与下位机PLC的通信,给出了程序中读取传感器数据和控制液压站动作的PPI协议指令格式,完成了整套测控系统的开发。该系统已配合轨道车辆均衡试验工装在现场进行测试,测试结果表明,系统性能稳定,功能完整,运行效果良好。
参考文献:
[1]向晓汉,刘摇摇.西门子S7-200PLC完全精通教程[M].北京:化学工业出版社,2014.
[2]黄大伟.LabVIEW与S7-200PLC PPI协议通讯的设计与实现[J].自动化与仪器仪表,2014(4):94-95.
[3]卢志俊.PPI协议的监控研究[D].重庆:西南大学,2008.
[4]龙永辉, 孙中生.Siemens PPI协议分析[J].工业控制计算机,2005,18(7):11-12.
[5]潘必胜.西门子PLC的PPI通信协议研究[J].单片机与嵌入式系统应用,2009(12):35-37.
[6]许广彬,王清灵.西门子PPI协议混合类型多单元报文协议剖析[J].机械工程与自动化,2009,4(2):40-42.
[7]许其义,武玉强,初学导.西门子S7-200 PPI协议获取及其通信控件研究[J].自动化仪表,2008,29(1):33-36.
[8]蔡锦达,倪建辉,郭 锐,等.PPI协议与西门子S7-200PLC的通讯[J].工业控制计算机,2006,19(4):13-14.
[9]彭魏臻,麻红昭,张 华,等.PPI协议分析[J].化工自动化及仪表,2006,33(4):47-49.
[10]西门子(中国)有限公司自动化与驱动集团.深入浅出西门子S7-200 PLC[M].北京:北京航空航天大学出版社,2003.
[11]李江全,刘 荣,李 华,等.西门子S7-200 PLC数据通信及测控应用[M].北京:电子工业出版社,2011.
责任编辑 徐侃春
Measurement and Control System of equalizing test for rolling stock based on PPI protocol in LabVIEW environment
LI Tian,LU Zhaijun
( Key Laboratory of Traffc Safety on Track of Ministry of Education,Central South University,Changsha 410075,China)
Equalizing test for rolling stock requires 8 sets of hydraulic oil cylinder which are controlled independently to drive the lift structure,needs to collect and store lifting height and wheel load data,calculate reduction rate of wheel load,and automatically stop when the rolling stock is elevated to a certain height.In this paper ,according to the test need,a set of Measurement and Control System was developed,the upper computer was PC,the lower machine was S7-200 PLC,in the LabVIEW programming environment,the VISA interface function was called to establish the communication with the PC and PLC by PPI protocol,the data of displacement sensor and weighing sensor were collected and processed to control the hydraulic oil cylinder.The implemented Measurement and Control System of equalizing test for rolling stock could meet the needs of measurement and control.
PPI protocol;PLC;LabVIEW;Measurement and Control System
U270.14∶TP39
A
1005-8451(2016)11-0022-05
2016-04-21
中车青岛四方机车车辆股份有限公司科研课题(SF/JG-2014-45)。
李 田,在读硕士研究生;鲁寨军,副教授。
