基于新型元胞自动机的高速列车运行仿真模型
2016-02-16王晓娅
刘 登,王晓娅
(1.中铁通信信号勘测设计(北京)有限公司,北京 100036;2.北京市工业技师学院,北京 100023)
基于新型元胞自动机的高速列车运行仿真模型
刘 登1,王晓娅2
(1.中铁通信信号勘测设计(北京)有限公司,北京 100036;2.北京市工业技师学院,北京 100023)
基于元胞自动机模型的基本原理,提出一种移动闭塞模式下高速列车运行仿真的新型元胞自动机模型,详细介绍该模型的基本组成单元及演变规则。通过简单的示例,证明了该模型能够真实地描述高速列车运行特点,实现了仿真过程中列车运行信息的实时可视性。
元胞自动机;高速列车;仿真模型
列车运行冲突管理问题的研究是高速铁路运输组织优化的关键问题之一,是实现高速铁路调度智能化的重要前提。事实证明,将列车运行仿真与冲突检测相结合,会有效提高列车运行冲突检测的实时性和准确性,从而为列车运行的实时调度提供依据,使调度结果更加接近铁路的实际运行情况。因此,寻求更精确的列车运行仿真模型,对于研究高速铁路列车运行冲突检测、提升铁路调度效率有着深远的意义。
元胞自动机(CA,cellular automaton)模型是一种模拟非线性复杂系统的重要工具,适用于研究模拟复杂系统的时空动态演变过程,近些年它在铁路列车运行仿真的研究中也得到了广泛应用。本文基于元胞自动机模型的基本原理,提出了高速列车运行仿真的新型元胞自动机模型。
1 元胞自动机简介
元胞自动机在上世纪四十年代,由著名数学家冯·诺伊曼第一次提出。它是一种定义在离散空间上的网格动力学模型,由元胞、元胞空间、邻居以及演变规则4个基本部分组成。元胞自动机并没有明确的方程式,而是包含了一系列模型构造及演变的规则,凡是满足这些规则的模型都可算作是CA模型。因此,元胞自动机实际上是一类模型的总称。元胞自动机各组成部分之间的关系图如图1所示。

图1 元胞自动机的组成
1.1 元胞
又称为单元,是一种用于存储“状态”的元素,是元胞自动机最基本的组成部分。元胞分布在离散的一维或多维空间里,具有离散且有限的状态并且在离散时刻域里不断地演变。
1.2 元胞空间
元胞空间是元胞所分布的空间网格集合,可以是任意维数,但目前主要研究的是一维和二维。
1.3 邻居
邻居是元胞周围按一定规则划定的相邻元胞的集合,邻居的状态会对该元胞下一时刻的状态演变产生影响。
1.4 演变规则
演变规则实际上是一个状态转移函数,它根据元胞及其邻居的当前状态来确定下一时刻该元胞的状态。演变规则是元胞自动机最为核心的内容,演变规则选取是否合理是模型建立成功与否的关键。
元胞自动机是一个动态演变系统,其主要特点有:时空间离散性、同质性、一致性、并行性、状态离散且有限等。其中,同质性是指元胞空间内的所有元胞都遵循相同的演变规则;一致性是指元胞分布的状态类型都是一致的;而并行性则是指各元胞在某一时刻的状态变化是独立并行发生的。在CA模型的实际应用里,要始终注意,在元胞自动机的演变过程中,每个元胞下一时刻的状态只与该元胞及其邻居此刻的状态以及演变规则有关。
2 高速列车运行仿真模型建立
在高速铁路的运营过程中,列车都是按照计划沿着特定的线路追踪运行,不同线路之间会有交汇,同一线路也会有分岔。为了能够更真实地模拟高速铁路网络中列车的运行,本文提出一种把列车作为元胞,列车运行信息作为元胞状态,同一线路上相邻列车彼此互为邻居,且以轨道线路为元胞空间的元胞自动机模型。
2.1 模型基本组成
2.1.1 模型的元胞
在本模型中把运行的列车作为元胞,并根据高速列车运行的特点赋予每个元胞多种类型的状态,包括:线路标号、列车编号、列车运行状态、列车位置、追踪距离、最大限速以及列车速度,以上这些状态基本涵盖了列车运行过程中所需要的全部重要信息。而各类状态的定义及取值范围如下:
(1)线路标号用来区分不同的线路,取值为事先设定好的整数编号,不同线路上运行的列车该状态的取值不同,而线路标号不同的元胞在一般情况下不会成为彼此的邻居。
(2)列车编号用来区分不同列车,每列列车对应不同的编号,其取值范围为事先设定好的整数序列,根据列车编号来区分不同的列车,从而能够在仿真过程中分别记录和分析它们所对应的运行信息。
(3)列车运行状态表示的是列车当前运行的状态,其取值范围为{0,1,2,3,4},其中,0表示静止,1表示加速,2表示常规制动,3表示紧急制动,4表示匀速。而列车运行速度的变化必须根据列车的运行状态来确定。例如,列车当前运行状态为匀速时,该列车下一时刻速度应等于当前的速度。
(4)列车位置指列车离始发点的距离,其取值范围为{0,1,2,…,lmax},其中,lmax表示列车所在轨道线路始发站到终点站距离,不同线路长度不一样。
(5)列车追踪距离是根据列车及其前行列车(邻居)的当前位置计算得到,取值范围为{0,1,2,…,Tmax…},其中,Tmax为以最大速度运行的情况下,列车紧急制动所需行走的距离再加上一定的安全距离。
(6)列车的最大限速(vmax)就是当前条件下列车的最大允许行进速度,其取值由列车所在的线路、模式限速以及追踪距离等因素决定。
(7)列车速度取值范围为{0,1,2,…,vmax},在模型的演变过程中列车的速度必须依据列车运行状态来更新,不能出现突变。
2.1.2 模型的演变空间
本文中把轨道线路作为元胞空间,并以m为单位划分为若干相邻的格子。虽然高速铁路线路呈网状分布且相互之间是交叉的,但还是将此元胞空间当作是一维的,只是在特殊的地点需要做一些特殊处理。图2为一段铁路线路示意图,其中,黑色区段所对应的元胞空间相当于一维的,而红色区域所对应的空间却呈现出二维特性。因为在红色区域内不同的轨道线路之间存在交汇或分岔,导致不同线路上运行的列车之间也可能会对彼此产生影响,从而成为对方的邻居。
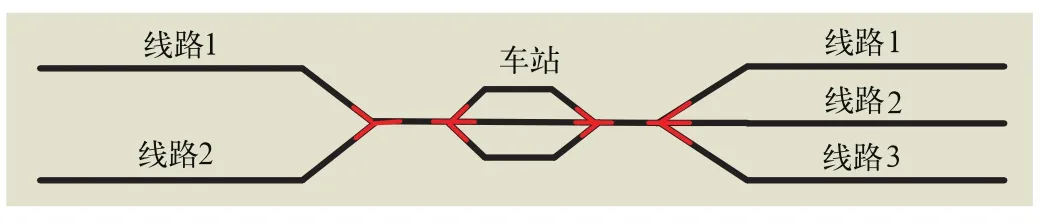
图2 铁路网络示意图
2.1.3 元胞的邻居
本文主要把列车运行过程中所追踪的前行列车作为该车邻居,因为前行列车当前所在的位置及其运行速度会影响到后面列车的运行,最直接的表现就是追踪距离的改变。而鉴于铁路运输的特点,应该把信号机和车站也作为元胞潜在的“邻居”,因为列车在区间里是根据信号机的显示来运行的。
2.2 模型演变规则
本文所要建立的高速列车运行仿真模型的具体演变规则如下。
2.2.1 线路标号、列车编号更新
如果列车在运行过程中所处的线路没有改变,则它的线路编号保持不变,否则就根据其具体的所在线路而变更。而在仿真过程中,列车编号应始终保持不变。
2.2.2 列车运行状态更新
在列车运行仿真过程中,列车运行状态需要根据列车当前运行速度以及最大限速来确定。当列车速度低于最大限速时,列车运行状态应为加速,从而提高列车的运行速度,以确保线路的运营效率;如果列车的速度等于最大限速,则保持匀速;而当列车速度超过最大限速时,列车的运行状态则变为紧急制动,以确保行车安全。
2.2.3 列车速度更新
列车速度是根据当前列车运行状态来更新的,在单位时间内具体的更新规则如下(所有参数都取正整数值)。
(1)静止: v=0;
(2)加速:v=min(v+a,vmax),其中,v是列车运行速度,a是列车的加速度, vmax是列车允许的最大运行速度;
(3)匀速:v=v;
(4)常规制动:v=max(v-dn,0),其中,dn是列车常规制动时的减速度;
(5)紧急制动:v=max(v-de),其中,de是列车紧急制动时的减速度。
2.2.4 列车位置更新
列车位置是根据列车运行状态和运行速度来更新的,且单位时间内列车的位移增量满足公式:,其中,a是加速度,可正可负。具体的更新规则如下。
(1)静止: s=s,其中,s是列车当前的位置;
(2)加速:s=[s+v+a/2],注:求得的结果需取整数(下同);
(3)匀速:s=s+v;
(4)常规制动:s=[s+v-dn/2];
(5)紧急制动:s=[s+v-de/2]。
2.2.5 追踪距离更新
列车的追踪距离是由列车当前位置及其邻居(包括前行列车、信号机以及车站等)位置共同决定的,例如,编号为n+1的列车的前行列车编号是n,则Tn+1=sn-sn+1,其中,s代表列车的位置。
2.2.6 最大限速更新
列车的最大限制速度应取当前线路限速、模式限速和临时限速三者之间的最小值,其中线路限速和模式限速是依据线路及列车运行模式确定的,一般情况下保持不变,而临时限速则是由追踪距离确定,是实时变化的。
The findings may provide a…for the future research on...
3 列车运行仿真
利用Microsoft Visual Studio 2013的环境搭建列车运行及调度仿真平台,使用的编程语言为C#,根据设计需求,列车运行及调度仿真平台的整体设计主要划分为6个模块,如图3所示。

图3 仿真平台的模块划分
我们用上述的列车运行仿真平台来模拟一个中高速列车共线运行的小铁路网络,如图4所示。

图4 简化的铁路线路
两条线路在车站进站口前20 km处交汇,然后在车站出站口20 km处分开,高速列车限速100 m/s,中速列车限速80 m/s;试验还设定有4辆高速列车,依次编号为1、3、5、7,有3辆低速列车,编号为2、4、6,它们的原计划时刻表如表1所示(单位:s)。

表1 列车时刻表
现按照初始计划时刻表对列车运行进行仿真,得到各列车的时间位移图如图5所示(黄色线代表低速列车,绿色线代表高速列车)。

图5 计划运行时刻表
现假设由于发生了特殊情况,整个网络向后延迟了200 s,也就是在200 s时刻道岔1才准许列车通行,如果按照原计划该时刻应该是4号车通过道岔点1,但是由于整体的延迟导致了列车运行冲突的产生,如果还继续按照既定列车时刻表运行的话将严重降低高速列车的运营效率,这时就可以通过调度算法生成新的调度策略,列车的通过次序变成了1→3→5→2→4→7→6,对应的新时刻表及列车运行时刻位置如图6~图8所示。
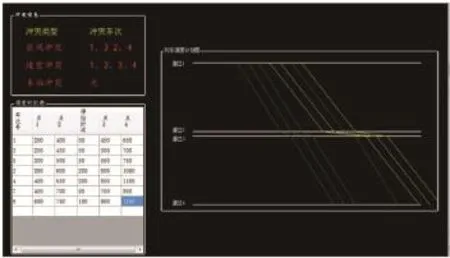
图6 新调度时刻表
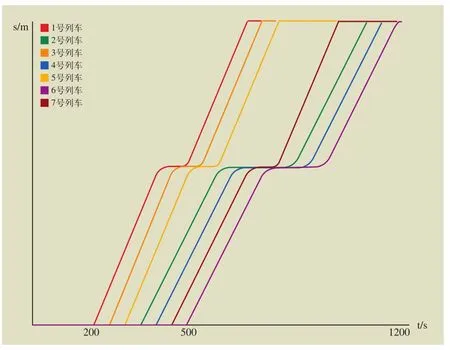
图7 列车运行仿真时间-位移图
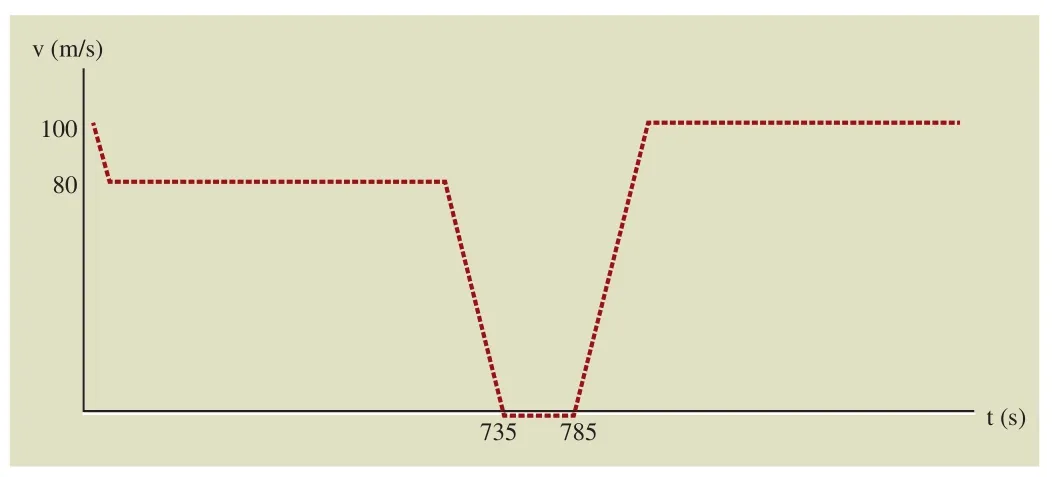
图8 7号列车速度-时间图
由实验可以看出,本文提出的新型高速列车运行元胞自动机仿真模型能够很好地描述移动闭塞模式下高速列车的运行特点,能够真实模拟高速列车的运行,并且在仿真过程中能对网络中每列列车的运行信息进行记录和分析。
4 结束语
本文提出了一种以列车为元胞,列车运行信息为元胞状态,相邻列车(或车站等)为邻居,轨道线路为演变空间的高速列车运行的元胞自动机模型,并详细给出了该模型的演变规则。通过对一个小铁路网络中列车的追踪运行进行模拟仿真,证明该模型能真实地描述高速列车运行的特点,并且在模型的仿真过程中,能够清楚地知道当前在线运行的所有列车的具体位置、速度以及运行状态。通过这些信息,可以准确地预测出未来一段时间内整个铁路网络的运营状况,实现对潜在列车运行冲突的检测及判断,从而为列车运行的实时调度提供依据。
[1]Nagel K,Schreckenberg M.A cellular automaton model for freeway traffic[J].J.Phys.I (France), 1992(2):2221-2229.
[2]KePing Li,ZiYouGao,Bin Ning.Cellular automaton model for railway traffc[J].Journal of Computational Physics,2005,209(1):179-192.
[3]周华亮,高自友,李克平.准移动闭塞系统的元胞自动机模型及列车延迟传播规律的研究[J].物理学报,2006,54(4):1706-1710.
[4]付印平,高自友,李克平.基于元胞自动机模型的地铁列车追踪运行研究[J].交通运输系统工程与信息,2008,8(4):89-95.
责任编辑 陈 蓉
New cellular automata based simulation model for high-speed train operations
LIU Deng1,WANG Xiaoya2
( 1.China Railway Communication and Signal Survey &Design (Beijing) Co.Ltd.,Beijing 100036,China 2.Beijing Industrial Technician College,Beijing 100023,China)
With regard to the basic principle of cellular automata model,a new cellular automata based simulation model for high-speed train operations was proposed.The paper introduced the basic elements and evolution rules.A simple example proved that this model could accurately describe the characteristics of high-speed trains operation,implemented the real-time visibility of train operation information during the simulation.
cellular automata;high-speed train;simulation model
U266∶U270.14∶TP39
A
1005-8451(2016)11-0015-05
2016-05-04
刘 登,助理工程师;王晓娅,讲师。
