高频地波雷达电离层杂波的空域极化域协同抑制方法
2016-02-13阳云龙毛兴鹏董英凝邓维波
阳云龙毛兴鹏*②董英凝②邓维波②
①(哈尔滨工业大学电子与信息工程学院 哈尔滨 150001)
②(哈尔滨工业大学信息感知技术协同创新中心 哈尔滨 150001)
高频地波雷达电离层杂波的空域极化域协同抑制方法
阳云龙①毛兴鹏*①②董英凝①②邓维波①②
①(哈尔滨工业大学电子与信息工程学院 哈尔滨 150001)
②(哈尔滨工业大学信息感知技术协同创新中心 哈尔滨 150001)
高频地波雷达(High Frequency Surface Wave Radar, HFSWR)能够探测视距外的海上目标和超低空飞行器,但其性能通常被电离层杂波严重影响。该文使用一种空域极化域协同滤波算法用于电离层杂波抑制。针对其中电离层杂波空域和极化域参数的估计问题,在距离-多普勒域上利用基于压缩感知(Compressive Sensing, CS)的DOA测角方法进行空域参数估计,并提出一种基于统计特性的极化参数估计方法完成极化参数估计。这两种估计方法可获得更高的参数估计精度,从而提高了电离层杂波空域极化域抑制方法的性能。某HFSWR系统实测数据处理结果表明了参数估计和电离层杂波抑制方法的有效性。
高频雷达;电离层杂波;参数估计;空域极化域协同滤波
1 引言
利用高频频段(3~30 MHz)的垂直极化电磁波远超过微波雷达探测范围的传播优势,高频地波雷达可实现对海面舰船和超低空飞行器的超视距探测。基于这一特点,高频地波雷达被认为是一种能实现濒海国家管控和监督海上专属经济区的主要技术手段。特别是当高频地波雷达工作在高频频段中的低频部分(3~6 MHz)时,其可以更低的损耗实现更远的作用距离[1,2]。
然而,在获取超视距探测这一优势时,高频地波雷达不可避免地受到电离层杂波、海杂波、电台干扰和其他工业干扰的影响,这制约了高频地波雷达的探测性能。其中,电离层杂波以其能量强、存在时间长、覆盖连续多个距离单元和多普勒单元等众多特点,成为了影响高频地波雷达探测性能的主要因素[3]。因此,研究有效的电离层杂波抑制措施来降低其对高频地波雷达的影响,是当前研究高频雷达抗干扰的一个重点。
目前电离层杂波抑制的方法主要集中在空域自适应波束形成方法[4-8]、旁瓣对消抗干扰方法[9-12]和极化域抗干扰方法[13-16]上。其中,空域自适应波束形成方法主要是通过自适应地调节阵列的权值,在保留期望信号的同时最大限度地抑制电离层杂波干扰;旁瓣对消方法则是加一系列辅助天线,将主瓣波束对准目标信号,并在干扰副瓣上形成零点,以达到在空间和时间上良好的抑制效果;而极化域抗干扰则是利用一对或一组正交极化天线获取回波信号的极化特性再加以滤波。虽然这些方法是基于高频地波雷达不同的接收阵列和接收条件而提出来的,但都利用了电离层杂波与目标信号在空域或极化域上参数的差异,并能取得不错的抑制效果。然而,若电离层杂波与目标信号的来波方向相近甚至相同时,在空域上抑制杂波将很难取得更好的效果;特别地,当前实际应用的高频地波雷达的接收阵列以线阵为主,因而无法同时提供方位角和俯仰角上的分辨力[3],这就导致即使电离层杂波与目标信号在方位角和俯仰角上都有较大的差异,也可能因为空间频率的值近似甚至相同,无法在空域上提供良好的电离层杂波抑制效果。类似地,若电离层杂波的极化状态与目标信号的极化状态相近时,在极化域上抑制杂波也难以取得理想的效果。同时,一些抑制电离层杂波的算法未讨论在实际情况中如何准确地估计杂波的参数,并将其运用到杂波抑制算法当中。另一些算法给出了参数估计方法,但运用到实测数据中存在困难或局限性。例如有人提出用多重信号分类(Multiply Signal Classification, MUSIC)算法对电离层杂波测角[12],但MUSIC算法需获取大量的快拍数并需要已知信号个数,而在现实情况中这些条件难以全部满足。
为了解决上述问题,本文首先以L型阵列作为高频地波雷达接收阵列,将空域极化域协同滤波算法[17]运用到电离层杂波抑制中。然后在距离-多普勒域上将基于压缩感知(Compressive Sensing, CS)的DOA测角方法[18]用于电离层杂波的空域参数估计,并提出在距离-多普勒域上基于统计特性的极化参数估计方法。最后通过对实测数据的处理,给出实测数据的空域参数估计和极化域参数估计,并通过参数估计后的滤波结果对比验证参数估计方法和空域极化域协同滤波算法的有效性。
2 接收阵列模型及基本信号处理
2.1 高频地波雷达接收阵列模型
本文中高频地波雷达接收阵列为16个阵元组成的L型极化敏感阵列,如图1所示。其中,平行于海岸线的8个阵元为主阵,垂直于海岸线的8个阵元为辅阵。主阵的阵元间距为d1=12 m,辅阵的阵元间距为d2=12 m,主阵与辅阵相距d3=10 m。图1中辅阵里方框代表水平极化天线,其余圆圈均表示为垂直极化天线。另外,图1中的θ∈[0, 90°]表示俯仰角,定义指向天顶时为0°;φ∈[-180°, 180°]表示方位角,定义指向正前方(主阵法线方向)时为0°。
需要指出的是,图1所示的接收阵列中垂直极化阵元数较多,可在空域上对杂波进行抑制。而水平极化通道则与垂直极化通道做极化信息处理,在极化域上实现杂波抑制。
2.2 信号模型及基本信号处理过程
各个通道接收到的远场回波信号一般在经过混频、采样、正交双通道处理和相干积累后,先得到距离域信息,然后将距离域的信号做快速傅里叶变换(FFT),得到信号的频域信息。为了更好地表现回波信号的多普勒效应及其信息,一般将频域转变到信号的多普勒域,最后得到距离-多普勒谱(Range-Doppler spectrum, RD谱)。一个垂直极化通道形成的RD谱如图2所示。图中横坐标表示多普勒单元,纵坐标表示距离单元,各个距离-多普勒单元的功率根据数值大小用不同的颜色表征。

图1 接收阵列模型Fig. 1 Receive array model

图2 垂直极化通道的RD谱Fig. 2 The Range-Doppler spectrum of vertical polarization chennal
在极化敏感阵列中,信号的极化信息表现为阵元中两正交极化通道(即由一个垂直极化通道和一个水平极化通道组成)之间的相关特性。假设信号S(ri,fj)是极化角为ε、极化角相差为η的完全极化平面波,于是有[15]:

式中,ri和fj分别代表第i个距离单元和第j个多普勒单元,s(ri,fj)为第(i,j)个距离-多普勒单元的信号幅度,ap表示信号的极化域导向矢量。于是S(ri,fj, 1)表示信号的水平极化部分,S(ri,fj, 2)表示信号的垂直极化部分。同时,式中的极化参数也具有明确的物理意义。极化角ε的正切值tanε表示垂直极化方向电场幅度与水平极化方向电场幅度的比,极化角相差η表示垂直极化方向电场的相位与水平极化方向电场的相位之差。另外从式(1)中可以看到,阵列接收的信号的极化信息受其空域信息影响。

同时,阵列中的各垂直极化通道经过上述信号处理后可将接收的数据展示成如下形式,即:式中,Si(ri,fj, 2)与St(ri,fj, 2)分别代表干扰和目标信号的垂直极化部分,n(ri,fj)为加性高斯白噪声;a(ri,θt,φt)和a(ri,θi,φi)代表目标信号和干扰的空域导向矢量。若入射信号为远场窄带信号,以L型阵列的主阵或辅阵第n个阵元为相位参考点,则主阵或辅阵第n+1个阵元接收的信号的相对相位延迟可表示为:

以主阵最左边的天线为基准天线,L型阵列的空域导向矢量as可以表示为:

其中,M1和M2分别表示主阵和辅阵的阵元个数,λ表示雷达的载波波长,表示转置矩阵。
设远场信号s经L型极化敏感阵列接收并经基本信号处理后的输出为:

式中,asp为信号的导向矢量。由于极化敏感阵列可以同时感知信号的空域和极化域信息,所以asp又被称为信号的空域极化域联合导向矢量,并被表示为:


式中,m≤M2表示以基准天线为参考,水平极化天线所处的阵元序列号;表示该水平极化阵元相对垂直极化的基准天线延迟的相位。于是,L型极化敏感阵列接收到的信号可表示为:

式中,asp,t和asp,i分别为目标信号和干扰的空域极化域联合导向矢量,st(ri,fj)和si(ri,fj)代表目标信号和干扰的幅度。
3 电离层杂波的空域极化域协同滤波
3.1 基于斜投影算子的空域极化域协同滤波器

式中,(·)H表示为Hermitian转置,的正交补空间,定义为:

其中,I为单位矩阵。斜投影算子有如下性质[19]:

利用这一性质,可构造空域极化域斜投影滤波权矢量如下[17]:


于是在信噪比较高可忽略噪声的影响下,该滤波器可完全消除干扰并同时恢复出无失真相位和幅度的目标信号。
3.2 杂波和目标信号特征的选取
电离层杂波和目标信号的特征区别首先表现在距离-多普勒域上。电离层的高度大致是已知的。白天,E层可能出现在离地高度为90~140 km中的某一高度上;F层白天常分为2层,其中F1层可能出现在170~220 km中的某一高度上,F2层可能出现在220~450 km中的某一高度上。电离层具体出现的位置主要取决于当时该电离层内最大电子浓度所在的高度[3],各电离层在白天形成的杂波常出现在RD谱内大致相似的距离上并占据若干距离单元,同时在多普勒域上有明显的展宽。夜间,随着太阳辐射的减弱,电离层中的E层会消失;F1层上升,与F2层合成一片F层区域。相应地,晚上录取的数据形成的RD谱上一般不会出现E层杂波,同时会出现一大片F层杂波,但其在RD谱上出现的距离比白天要远。例如图2所示的RD谱是某年1月下午录取的数据,图中距离单元大于150且有多普勒展宽的高能量区域即为明显的F层杂波干扰。而目标信号在RD谱内通常表示为占据不超过5个距离-多普勒单元的十字形式。因而电离层杂波和目标信号在RD谱上的特征差异十分明显,可用于完成距离域参数和速度域参数的提取。
根据RD谱中估计出的电离层杂波位置,在滤波前需要对出现电离层杂波的区域估测出电离层杂波的空域参数和极化参数。然后利用RD谱中多普勒频率处于两个由海杂波形成的Bragg峰之间、距离域上小于90 km的区域内确定的目标信号,估测出目标信号的空域参数和极化参数。
3.3 空域参数估计
由3.1节滤波的过程可知,对目标信号和电离层杂波的参数估计很大程度影响滤波的效果。特别地,由于电离层杂波在时域上的非平稳性,在保证高频地波雷达输出信噪比的情况下很难获得多个快拍,故需要在单快拍下获取杂波的来波方向。
基于CS的DOA估计理论在来波信号稀疏的情况下,可以用较少的快拍数以较高的概率重构回波信号。由于在单个距离-多普勒单元上,电离层杂波的来波方向非常少,符合CS的应用条件。故本文使用基于CS的单快拍测角算法[18]进行电离层杂波测向。具体地,对L型阵列中主阵接收到的回波信号和辅阵接收到的回波信号分别用上述方法测角,得到在直角坐标系下的回波信号与主阵的夹角∠TOB及回波信号与辅阵的夹角∠TOA,如图1所示。为方便起见,记α=∠TOA,β=∠TOB。
根据图1,α和β与信号的俯仰角θ和方位角φ有如下关系:

根据式(16)和式(17),可解出信号的俯仰角和方位角如下:

这里,arctan(·)∈[-90°;90°]。
3.4 极化参数估计
当前对信号极化参数的估计大多出现在基于极化敏感阵列的空域极化域多参数联合估计方法中,例如子空间理论中的极化Root-MUSIC方法[20],基于稀疏重构的联合估计方法[21]和基于张量理论的联合估计方法[22]。对高频地波雷达而言,由于快拍数的限制,利用实测数据进行极化参数估计的有效方法还不是很多。同时由于目标信号的回波来自海面,其回波的水平极化分量被海水吸收,所以高频地波雷达想要探测的目标信号的极化角一般非常大(接近90°);而发射的垂直极化电磁波经电离层反射后既有垂直极化波,也有水平极化波,因而极化角不会非常大,于是我们只需对电离层杂波的极化参数进行估计。
由于电离层杂波聚集在有限的连续相邻的距离-多普勒单元上可使得干噪比较高,洪泓等人[16]提出了一种基于距离-多普勒域的电离层杂波极化参数估计方法,即在判定电离层杂波存在的若干连续距离单元上,逐距离单元计算每个距离-多普勒单元上的极化参数,将上述每个距离单元内能量最大的距离-多普勒单元的极化参数作为该距离单元的极化参数估计值,故可被称为能量最大极化参数估计方法。实测数据处理结果显示,利用该估计方法获得的极化参数进行极化域抑制电离层杂波能取得较好的效果,这说明该极化参数估计方法能较为有效地估计杂波的极化参数。
但是,如果能量最大的距离-多普勒单元内存在目标信号,则目标信号不同于电离层杂波的极化特性会导致上述估计方法得到的极化参数不精确甚至失效。
在距离域上可被分离出来且只占据若干连续距离单元(不超过6~7 km)的电离层杂波被视为镜面反射杂波[3],在较小的相干积累时间内具有较大的平稳性。同时其在相邻的距离单元和多普勒单元上具有一定的相似性[3],于是本文提出一种在距离-多普勒域上基于统计特性的极化参数估计方法,来解决上述估计极化参数方法受目标信号影响这一问题。首先,为避免噪声的影响,设定信号功率门限,将出现镜面反射杂波且满足功率大于该门限的距离-多普勒单元保留下来;接着,将保留下来的距离-多普勒单元的极化参数统计起来取平均值,作为这片杂波的极化估值,从而可极大地降低被电离层杂波覆盖的目标信号对该杂波极化参数估计的影响。这一估计方法与能量最大极化参数估计方法对实测数据处理的结果将在第4节展示。
4 实测数据处理结果
4.1 空域参数估计结果
为验证基于CS的单快拍测角算法用于电离层杂波测向的有效性,我们对沿海某高频地波雷达的实测数据进行了处理。该数据的原始RD谱如图2所示,设定能量门限对该图中的距离-多普勒单元做能量上的提取,将大于门限的距离-多普勒单元做基于CS的测向,得到该单元的俯仰角和方位角,然后我们将得到的每个距离-多普勒单元上信号的俯仰角和方位角根据数值用不同的颜色表征,就得到信号在距离-多普勒域上的俯仰角谱和方位角谱,分别如图3和图4所示。图3中俯仰角0°对应天顶方向,90°对应水平方向。图4中0°对应主阵列法线方向,即指向海面正前方。
从图3所示的俯仰角谱可以看到,电离层杂波的俯仰角主要来自天顶方向和斜向,而海杂波和目标信号主要来自俯仰角很大的海面方向。从图4所示的方位角可以看到,目标信号和海杂波的方位角主要集中在正负45°之间,而尽管在每个区域中的电离层杂波方位基本一致,不同区域的电离层杂波却对应于不同的方位角,表明不同区域的电离层杂波是由不同的电离层反射产生的,且各个电离层对应的方位角不同。

图3 能量最大信号的俯仰角谱Fig. 3 The pitch angle spectrum of the signal with maximum power

图4 能量最大信号的方位角谱Fig. 4 The azimuth spectrum of the signal with maximum power
为了进一步表现出电离层杂波与目标信号及海杂波在方向上的差异,将电离层杂波和目标信号及海杂波的测角结果展现在图5中。其中,红色点、绿色点和橘黄色点分别对应图2中处于第69距离单元、第153距离单元和第163距离单元附近的电离层杂波;蓝色五角星对应距离单元在30到60之间的目标信号的测角结果;粉红色点代表距离单元在30到60之间的海杂波的测角结果。图5中同心圆的半径由内到外表示从0°到90°的俯仰角θ;每个同心圆的圆周表示方位角φ,其0°指向主阵列法线方向,即海面正前方;每个点表示一个距离-多普勒单元中测到的信号的俯仰-方位角度。从图5中可以更清晰地看到,电离层杂波以来自天顶附近方向为主,而目标信号主要来自海面。
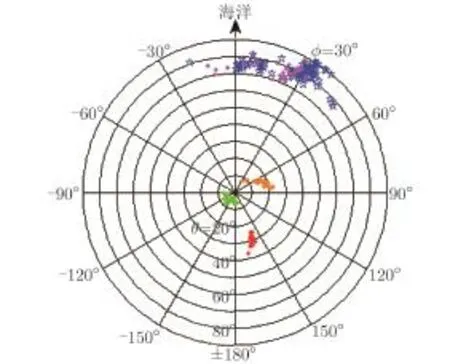
图5 电离层杂波和目标信号及海杂波的角度谱Fig. 5 The angle spectrum of the ionospheric clutter, target signal and sea clutter
4.2 极化参数估计结果
为了对比能量最大极化参数估计方法和本文所提的在距离-多普勒域上基于统计特性的极化参数估计方法,我们在第(153, 126)距离-多普勒单元添加了一个俯仰角为82°,方位角为30°的目标信号,该信号的俯仰角和方位角与第(59, 136)距离-多普勒单元的真实目标信号一致。同时由于基本信号处理中窗函数的运用,该信号对其相邻的上下左右4个距离-多普勒单元均有影响,并且该目标信号被F层杂波覆盖。
类似RD谱,我们将每个距离-多普勒单元上信号的极化角和极化角相差根据数值用不同的颜色表征,就得到信号在距离-多普勒域上的极化角谱和极化角相差谱。于是,我们对添加了目标信号后的距离-多普勒域上的信号作极化参数估计,其结果如图6和图7所示。

图6 极化角谱Fig. 6 The spectrum of polarization angle

图7 极化角相差谱Fig. 7 The spectrum of polarization phase delay
从图6可以看到电离层杂波的极化角与海杂波及可能的目标信号差异明显,同时连续存在电离层杂波的距离单元上的极化角几乎一致。从图7也可以看到每片电离层杂波的极化角相差也基本保持一致,并与海杂波和海面上的信号差异明显。这为下一步的滤波做好了参数准备。同时处理结果显示,当未加入目标信号时,能量最大极化参数估计方法得到的第153距离单元的极化角和极化角相差分别为67.6°和294.1°;基于统计特性极化参数估计方法得到的结果分别为67.4°和295.7°,两种方法估计的数值基本一致。而当加入目标信号后,能量最大极化参数估计方法得到的第153距离单元的极化角和极化角相差分别为81.7°和332.8°,与未加入目标信号相比估计值变化很大,这会影响到接下来的滤波;而基于统计特性极化参数估计方法得到的结果分别为67.4°和295.8°,与未加入目标信号时的估计值相比基本不变,避免了目标信号对电离层杂波的极化参数估计的影响。
4.3 协同滤波处理结果
图8给出用能量最大极化参数估计电离层杂波极化信息后的空域极化域协同滤波结果。对比图2我们可以看到除了距离单元153及其附近的电离层杂波,其他区域的电离层杂波都受到了较好的抑制,而153距离单元及其附近的电离层杂波由于极化参数估计不准确的影响,未能对该区域的电离层杂波形成很好的抑制效果。相应地,图9给出的是在基于统计特性的极化参数估计后的空域极化域协同滤波结果。从图9中我们可以看到各个不同区域的电离层杂波被较好地抑制,其总体抑制效果要好于图8。同时,从图8和图9中红色圆圈内可以看到,第(153, 126)和第(59, 136)距离-多普勒单元中的仿真目标信号和真实目标信号都被保留下来。对比图8和图9,可以看到极化参数估计对后继滤波效果有较为明显的影响。

图8 能量最大极化参数估计后的空域极化域协同滤波结果Fig. 8 The output of space-polarization collaborative filter after estimation of polarization parameter based on maximum power

图9 基于统计特性的极化参数估计后的空域极化域协同滤波结果Fig. 9 The output of space-polarization collaborative filter after estimation of polarization parameter based on statistical characteristics
5 结论
本文使用一种斜投影空域极化域协同滤波完成电离层杂波抑制。在距离-多普勒域上将基于CS的DOA测角方法应用于电离层杂波的方向估计,并提出一种基于统计特性的极化参数估计方法实现极化参数估计。这两种参数估计算法都利用了电离层杂波在距离-多普勒域上具有更高的干噪比的特性,估计性能的提升使基于空域极化域协同滤波的电离层杂波抑制算法取得更好的效果。实测数据处理结果表明了参数估计方法和滤波算法的有效性。
[1]Chan H C. Iceberg detection and tracking using high frequency surface wave radar[R]. Defence Research Establishment Ottawa (ontario), 1997.
[2]Chan H C. Detection and tracking of low-altitude aircraft using HF surface-wave radar[R]. Defence Research Establishment Ottawa (ontario), 1998.
[3]Chan H C. Characterization of ionospheric clutter in HF surface-wave radar[R]. Defence R&D Canada-Ottawa, 2003.
[4]Fabrizio G A, Gray D A, and Turley M D. Experimental evaluation of adaptive beamforming methods and interference models for high frequency over-the-horizon radar systems[J].Multidimensional Systems and Signal Processing, 2003, 14(1): 241-263.
[5]Fabrizio G A, Gershman A B, and Turley M D. Robust adaptive beamforming for HF surface wave over-the-horizon radar[J].IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(2): 510-525.
[6]Wan Xian-rong, Cheng Feng, and Ke Heng-yu. Experimental trials on ionospheric clutter suppression for high-frequency surface wave radar[J].IEE Proceedings Radar,Sonar and Navigation, 2006, 153(1): 23-29.
[7]Guo Xin, Sun Hong-bo, and Yeo T S. Interference cancellation for high-frequency surface wave radar[J].IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(7): 1879-1891.
[8]Riddolls R J and Adve R S. Two-dimensional adaptive processing for ionospheric clutter mitigation in high frequency surface wave radar[C]. Proceedings of Radar Conference, Pasadena, 2009: 1-4.
[9]Wan Xian-rong, Ke Heng-yu, and Wen Bi-yang. Adaptive ionospheric clutter suppression based on subarrays in monostatic HF surface wave radar[J].IEE Proceedings Radar,Sonar and Navigation, 2005, 152(2): 89-96.
[10]黄亮, 文必洋, 吴立明, 等. 高频地波雷达电离层干扰抑制研究[J]. 电波科学学报, 2007, 22(4): 626-630. Huang Liang, Wen Bi-yang, Wu Li-ming,et al.. Ionospheric interference mitigation in HFSWR[J].Chinese Journal of Radio Science, 2007, 22(4): 626-630.
[11]Li Lei, Xu Rong-qing, and Li Gao-peng. Robust ionospheric clutter mitigation method for high frequency surface wave radar[J].Science in China Series F:Information Sciences, 2008, 51(12): 2087-2093.
[12]Tian Wen-long, Li Gao-peng, and Xu Rong-qing. Ionospheric clutter mitigation for high-frequency surface-wave radar using two-dimensional array and beam space processing[J].IET Radar,Sonar&Navigation, 2012, 6(3): 202-211.
[13]Mao Xing-peng and Liu Yong-tan. Null phase-shift polarization filtering for high-frequency radar[J].IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1397-1408.
[14]Mao Xing-peng, Liu Ai-jun, Hou Hui-jun,et al.. Oblique projection polarisation filtering for interference suppression in high-frequency surface wave radar[J].IET Radar,Sonar&Navigation, 2012, 6(2): 71-80.
[15]Mao Xing-peng, Hong Hong, Deng Wei-bo,et al.. Research on polarization cancellation of nonstationary ionosphere clutter in HF radar system[J].International Journal of Antennas and Propagation, 2015: 1-12.
[16]洪泓, 毛兴鹏, 果然, 等. 基于距离-多普勒域的电离层杂波极化抑制方法[J]. 系统工程与电子技术, 2014, 36(12): 2400-2405. Hong Hong, Mao Xing-peng, Guo Ran,et al.. Method for polarization cancellation of ionospheric clutter based on range-Doppler domain[J].Journal of Systems Engineering and Electronics, 2014, 36(12): 2400-2405.
[17]Hong Hong, Mao Xing-peng, and Hu Cui. A multi-domain collaborative filter for HFSWR based on oblique projection[C]. Proceedings of Radar Conference, Atlanta, 2012: 0907-0912.
[18]王秀红, 毛兴鹏, 张乃通. 基于DOA的脉冲压缩雷达单快拍DOA估计[J]. 系统工程与电子技术, 2014, 36(9): 1737-1743. Wang Xiu-hong, Mao Xing-peng, and Zhang Nai-tong. Single-snap DOA estimation based on compressed sensing in pulse compression radar system[J].Journal of Systems Engineering and Electronics, 2014, 36(9): 1737-1743.
[19]Behrens R T and Scharf L L. Signal processing applications of oblique projection operators[J].IEEE Transactions on Signal Processing, 1994, 42(6): 1413-1424.
[20]Wong K T, Li Linshan, and Zoltowski M D. Root-MUSIC-based direction-finding and polarization estimation using diversely polarized possibly collocated antennas[J].IEEE Antennas and Wireless Propagation Letters, 2004, 3(1): 129-132.
[21]田野. 基于稀疏重构的阵列信号多参数估计[D]. [博士论文],吉林大学, 2014: 77-89. Tian Ye. Multi-parameter estimation for array signals based on sparse reconstruction[D]. [Ph.D. dissertation], Jilin University, 2014: 77-89.
[22]李阳. 张量理论及其在阵列处理中的应用研究[D]. [博士论文],复旦大学, 2014: 147-151. Li Yang. Tensor theory and its application to array signal processing[D]. [Ph.D. dissertation], Fudan University, 2014: 147-151.

毛兴鹏(1972-),男,辽宁人,现任教于哈尔滨工业大学电子与信息工程学院,教授,博士生导师,主要研究方向为电子侦察与电子对抗、 弱信号检测、雷达信号处理。
E-mail: mxp@hit.edu.cn

董英凝(1969-),女,黑龙江人,现任教于哈尔滨工业大学电子与信息工程学院,副教授,硕士生导师,主要研究方向为新体制雷达技术和现代信号处理。
E-mail: dongyn@hit.edu.cn

邓维波(1961-),男,黑龙江人,现任教于哈尔滨工业大学电子与信息工程学院,教授,博士生导师,主要研究方向为雷达目标散射特性、雷达抗干扰技术以及阵列信号处理。
E-mail: dengweibo@hit.edu.cn
Space-polarization Collaborative Suppression Method for Ionospheric Clutter in HFSWR
Yang Yunlong①Mao Xingpeng①②Dong Yingning①②Deng Weibo①②
①(School of Electronics and Information Engineering,Harbin Institute of Technology,Harbin150001,China)
②(Collaborative Innovation Center of Information Sensing and Understanding at Harbin Institute of Technology,Harbin150001,China)
High Frequency Surface Wave Radar (HFSWR) is able to receive surface target and low-flying aircraft echoes at a long-distance, but it suffers severely from ionospheric clutter. In this paper, a spacepolarization collaborative-based filter is introduced to mitigate ionospheric clutter. For parameter estimation on ionospheric clutter used for filters, a spatial parameter estimation algorithm based on compressive sensing is introduced to the DOA estimation of ionospheric clutter. In addition, a polarized parameter estimation algorithm based on statistical characteristics is proposed for ionospheric clutter in the range-Doppler spectrum. Higher estimation accuracy is achieved as a result of the range-Doppler spectrum; therefore, these two estimation algorithms enhance the performance of the space-polarization collaborative suppression method for ionospheric clutter. Experimental results of practical dual-polarized HFSWR data show the effectiveness of the two algorithms and the above mentioned filter for ionospheric clutter suppression.
High frequency radar; Ionospheric clutter; Parameter estimation; Space-polarization collaborative filter
TN95
A
2095-283X(2016)06-0673-08
10.12000/JR16024
阳云龙, 毛兴鹏, 董英凝, 等. 高频地波雷达电离层杂波的空域极化域协同抑制方法[J]. 雷达学报, 2016, 5(6): 673-680.
10.12000/JR16024.
Reference format:Yang Yunlong, Mao Xingpeng, Dong Yingning,et al.. Space-polarization collaborative suppression method for ionospheric clutter in HFSWR[J].Journal of Radars, 2016, 5(6): 673-680. DOI: 10.12000/JR16024.
阳云龙(1988-),男,广西人,哈尔滨工业大学电子与信息工程学院在读博士研究生,主要研究方向为雷达极化敏感阵列信号处理技术。
E-mail: yangyl@hit.edu.cn
2016-01-28;改回日期:2016-06-15;
2016-06-27
*通信作者:毛兴鹏 mxp@hit.edu.cn
国家自然科学基金(61171180),中央高校基本科研业务费专项资金(HIT. MKSTISP. 2016 26)
Foundation Items: The National Natural Science Foundation of China (61171180), Fundamental Research Funds for the Central Universities (HIT. MKSTISP. 2016 26)