正交编码位置检测系统研究
2016-02-09芮万智
刘 庚,何 娜,芮万智
(海军工程大学舰船综合电力技术国防科技重点实验室,武汉 430033)
正交编码位置检测系统研究
刘 庚,何 娜,芮万智
(海军工程大学舰船综合电力技术国防科技重点实验室,武汉 430033)
电磁发射装置对位置检测系统有高可靠性和高分辨率等要求,正交编码算法可以很好地满足这些要求。本文设计了一套由互为冗余的2组正交编码组合而成的位置检测系统及其脉冲信号处理规则,研究了正常正交编码信号的特征,分析了常见的异常脉冲信号特点并提出了异常脉冲的判断条件。
位置检测 正交编码算法 脉冲信号 异常脉冲信号
0 引言
电磁发射装置[1-3]可以利用直线电机产生的电磁力,按照提前设定的轨迹曲线,在有限的冲程和较短的时间内将负载加速到设定速度。电磁发射系统可以视为一个伺服系统,其控制策略是带位置反馈的PID闭环控制[4-6],该系统对于发射过程中的动子位置、速度和加速度都有很高的要求。因此,电磁发射系统需要一套可靠性高,冗余性好,分辨率高的位置检测系统。
本文设计分析了一种基于正交编码的位置检测系统[7]。该系统由互为冗余的2组正交编码组合而成,并通过特殊的控制策略提高了系统可靠性、冗余性和检测分辨率。
1 基于编码器的位置检测系统原理
该系统由编码器、传感器模块、控制模块以及计算中心四部分组成,如图1所示。动子上带有由非金属的基体和金属编码齿组成的编码器。当编码器随着动子运动时,编码齿会周期性地进入和离开传感器的感应范围,此时传感器连续输出脉冲信号,调整对应传感器的间距可以使两路脉冲信号正交。直线电机定子长度通常远大于动子的长度[8],需要沿定子的长度方向布置多个等距的传感器模块,模块间距须小于编码器长度,以保证了脉冲信号的连续性。不同传感器模块的脉冲信号由控制模块通过“或”运算进行整合,这样在动子运动的全过程控制模块都能够输出连续的正交信号。最后,控制模块将整合后的正交信号传递给计算中心,计算中心使用正交编码算法得到动子的位置。

图1 系统原理图
2 正交编码位置检测系统的设计
本文使用正交编码算法分别对两组脉冲信号进行处理,每组脉冲信号由每个传感器模块内平行布置的两个传感器输出的两路正交信号组成,如图2所示。正交编码算法可以检测动子运动的位置信息和方向信息,并且可以提高系统的位置检测精度。其位置信息计算方式如图3所示,正交编码状态机沿着正方向01→00→10→11→01变化时,每变化一次,脉冲计数加1,而当状态机沿着反方向01→11→10→00→01变化一次则脉冲计数减1。如果状态机出现除上述变化以外的跳变时,脉冲计数不变。调整传感器位置,使四路脉冲信号满足1、3两路相信号互正交,2、4两路信号相互正交,四路信号相位差分别为45°。本文采用2对互为冗余的正交编码信号,不仅可以提高检测的精度,且在某一路信号发生故障时,系统可以转入单精度模式继续进行电磁发射。
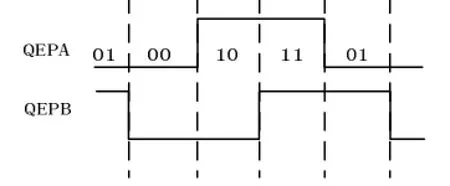
图2 正交编码脉冲
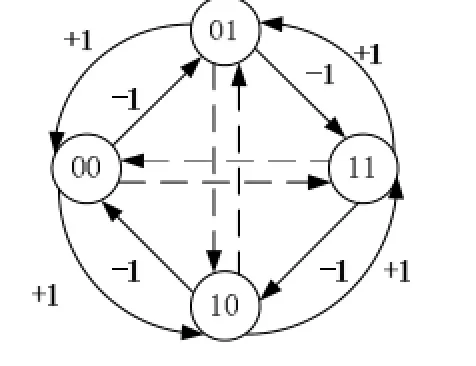
图3 正交编码状态机
3 正常正交编码信号特征
当位置检测系统正常工作时,输出4路依次相差45度的位置脉冲。在位置数据采集器内对其进行处理时,由上文的正交编码脉冲的计数方法分别对1、3两路信号和2、4两路信号两对正交编码脉冲分别进行脉冲计数,由于每次发射动子起始位置不完全一致,导致具体脉冲计数特点的不同,本文假设动子停止运动时都处于低电平状态,将起始位置分为八种情况进行分析,如图4所示。在位置检测系统正常工作时,2组正交编码的计数时刻不同,但在任意时刻,两组正交编码的计数值之差一定小于等于1,如表1所示。动子停止运动位置的不同也会影响正交编码计数,但其计算结果同样满足以上结论。
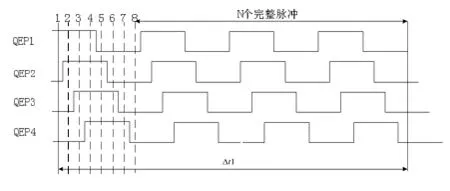
图 4 八种动子起始位置
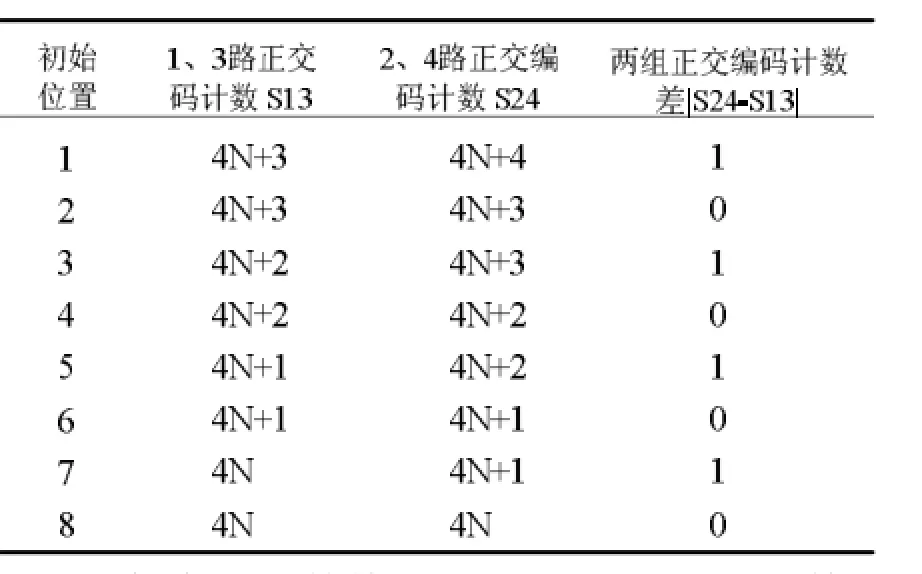
表1 正交编码计数特点
正交编码计数特征可以用于判断位置检测系统是否出现错误,而要通过所采集到的位置脉冲来判断位置检测系统的具体工作状态则需要定义其他判断标准:占空比、相位差和正交度,其中正交度是评价位置信号是否正常的最终标准。
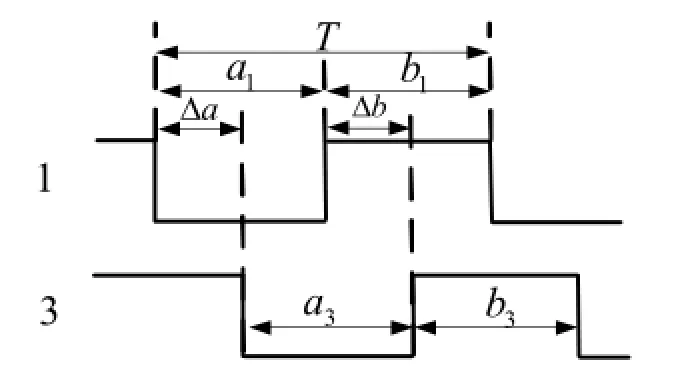
图.5正交编码脉冲特征
如图5所示,1通道信号的占空比D1定义为:

1、3两路信号的相位差θΔ定义为:

1、3两路信号的下降沿正交度Qa和上升沿正交度Qb定义为:
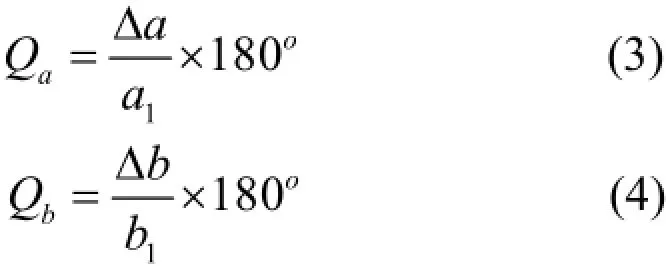
在正交编码位置检测系统设计的时候,最理想的信号特性为:D=50%,θΔ=90°,Qa=Qb=90°。在实际电磁发射过程中,只要当Qa和Qb满足0°<Qa<180°且0°<Qb<180°,此时3通道信号的跳变沿分别位于1通道信号相邻两个跳变沿之间,此时两路信号具有正交性,可以对其进行正交计算,位置检测系统正常工作。
4 常见异常脉冲及其判断条件
受到外界环境的各种因素干扰,位置检测系统的正交脉冲不可能完全是理想脉冲,最常出现的两种异常脉冲为:窄干扰脉冲和正交度异常。
如图6所示,窄干扰脉冲是异常出现的宽度很小的干扰脉冲信号。由于正交编码的计算方法并非简单的累加脉冲,所以窄干扰脉冲不一定会影响其最终的计数。根据图3所示的正交编码状态机,窄干扰脉冲1出现时,造成了正交脉冲改变10→00→01→11,正交编码错误地减小三个计数;窄干扰脉冲2出现时,引起了正交脉冲改变01→11→01,正交编码计数很快被修正。通过分析可知,当某通道(如1通道)出现窄干扰脉冲时,如果与其对应正交的通道(即3通道)的电平保持不变,这个窄干扰脉冲就不会影响最终的计数,而这种情况下必然在任意时刻有此时位置检测系统可以正常工作,否则正交编码会发生错误。
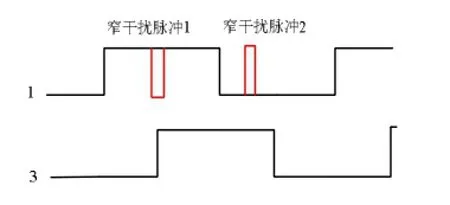
图6 窄干扰脉冲时的位置脉冲
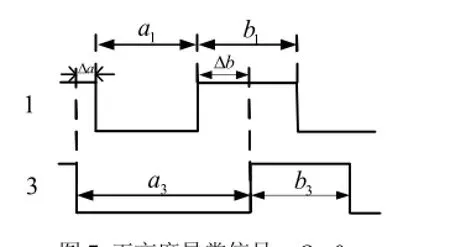
图7 正交度异常信号,Qa<0
正交编码位置检测系统要求相对应的两路信号正交度处于区间(0,180)内,如果正交度超出本区间则会出现位置信号报错,以下降沿正交度Qa为例,主要有以下两种情况。一种情况如图7所示,电磁发射系统处于正方向移动而aΔ为负,此时根据公式(3),下降沿正交度Qa为负,位置检测系统报错;另一种情况如图8所示,电磁发射系统处于正方向移动而Δa>a1,此时根据公式(3),下降沿正交度Qa>180°,位置检测系统报错。
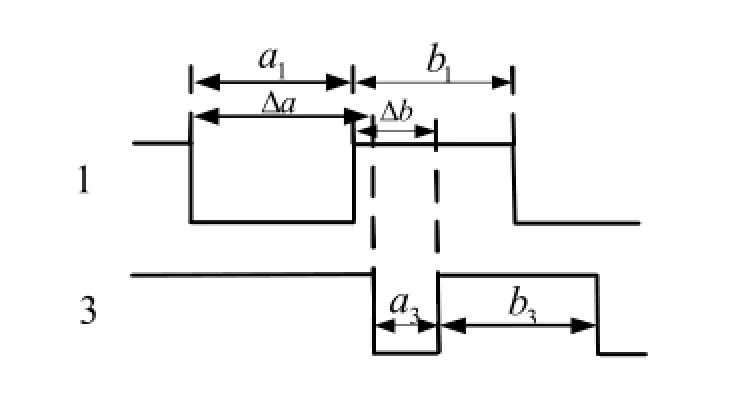
图8 正交度异常信号Qa>180°
5 结束语
本文基于电磁发射装置对位置检测系统的要求,设计了一种正交编码算法规则,分析了其正常脉冲与常见异常脉冲的特点,提出了异常脉冲的判断标准,为下一步优化算法,处理异常脉冲打下理论基础。
[1] Doyle M R, Samuel D. J, Conway T, et. Electromagnetic aircraft launch system- EMALS[J]. IEEE Transactions on Magnetics, 1995, 31(1): 528-533.
[2] Bushway R. Electromagnetic aircraft launch system development considerations [J]. IEEE Transactions on Magnetics, 2001, 37(1): 52-54.
[3] Fair H. D. The science and technology of electric launch[J]. IEEE Transactions on Magnetics, 2001, 37(1):25-32.
[4] Visioli A. A new design for a PID plus feed forward controller[J]. Elsevier Journal of Process Control, 2004, 14: 457-463.
[5] Cominos P, Munro N. PID controllers recent tuning methods and design to specification[C]. IEEE Proceeding Control Theory Application, 2002, 149(1): 46-53.
[6] Ang K. H, Chong G, Li Y. PID control system analysis design and technology[J]. IEEE Transactions on Control System Technology, 2005, 3(4): 559-576.
[7] Zhang Xiaoxu, He Na, Wang Qingyu, Ma Weiming. Position sensing system for linear motor based on quadrature encoding principle[J]. Journal of Naval University of Engineering, 2014, 26(1): 34-37.
[8] 鲁军勇, 马伟明, 许金. 高速长定子直线感应电动机的建模与仿真[J]. 中国电机工学报, 2008, 28(27):89-94.
Position Measurement Based on Quadrature Encoder Principle
Liu Geng, He Na, Rui Wanzhi
(National Key Laboratory of Science and Technology on Vessel Integrated Power System, Naval University of Engineering, Wuhan 430033, China)
Electromagnetic aircraft launch system requires a position measurement system with high reliability and resolution, and quadrature encoder principle can meet these requirements. In this paper, one kind of pulse signal processing rule based on two pairs of quadrature encoder is designed. Characteristics of normal and error quadrature encoder signals are studied. Criteria to judge whether error signals exist are proposed.
position measurement; quadrature encoder principle; characteristics of signals; error quadrature encoder signals
TM93
A
1003-4862(2016)12-0025-03
2016-07-19
刘庚(1992-),男,硕士研究生。研究方向:电力电子与电力传动。
