基于双通道DPCA技术的前视SAR微动目标检测
2016-02-07陈磊陈殿仁
陈磊,陈殿仁
(长春理工大学电子信息工程学院,长春 130022)
基于双通道DPCA技术的前视SAR微动目标检测
陈磊,陈殿仁
(长春理工大学电子信息工程学院,长春 130022)
针对将DPCA技术应用于前视SAR微动目标检测领域,首先分析了传统双通道SAR的DPCA对消原理,然后根据前视SAR的特性,提出基于天线收发同置的前视SAR双通道DPCA模式,研究前视微动目标回波经过DPCA对消后的信号幅相特性,确定微动目标所在的距离域,最后在MATLAB中对检测方法进行了仿真,仿真结果表明,当回波信噪比大于-5dB时,微动目标检测概率达到95%。
前视;DPCA;微动目标;目标检测;双通道
由于能够对飞行路线正前方场景成像,前视SAR除了辅助飞机起飞降落等民用用途之外,还能够使雷达载机对正前方视场中目标进行高分辨率侦查、识别,起到对战机、导弹等进行导引的作用,实现对地正前方高分辨成像,有助于构建“察打一体”武器系统[1]。
SAR成像算法均针对静止目标设计,而实际场景中存在大量的运动目标,如运动的战车、滑行的飞机。相对静止目标而言,此类目标更具有成像价值和威胁性,因此,SAR目标指示(GMTI)得到广泛的研究。但是,除了上述具有简单运动特征的目标外,雷达场景中还存在很多微动目标[2],如旋转的雷达天线、悬停的直升机旋翼、风力发电机的叶扇等。此类目标的回波具有微多普勒特性,使得前视成像结果中目标位置发生偏移和扩展。因此,对此类目标成像特性的研究是进行此类目标检测的基础,可以填补GMTI在地面微动目标检测和识别方面存在的漏洞。本文以前视SAR和前视SAR微动目标检测为研究内容,从系统建模、特性分析、数学仿真等多个方面对前视SAR成像算法、微动目标建模、微多普勒分析和提取、微动参数估计算法等内容进行了分析研究。
1 前视SAR双通道DPCA
1.1 SAR双通道DPCA原理
DPCA杂波对消由于原理简单被广泛应用于SAR动目标检测系统中,由于不同子孔径静止目标的回波相位一致,而运动目标的子孔径的雷达回波相位不一致,进行杂波对消后静止目标被消除,动目标的相位信息被保留下来,DPCA对消公式可以表示为:

其中,s1(t),s2(t)为两个通道的雷达回波。
在普通的侧视SAR DPCA系统中,要求有多个子天线组成不同的子孔径,通常情况下子孔径数等于天线个数。传统的DPCA平台的物理结构如图1所示,为了保证子孔径的相位中心一致,要求载机飞行速度等于子孔径天线的间距除以雷达发射脉冲的周期。
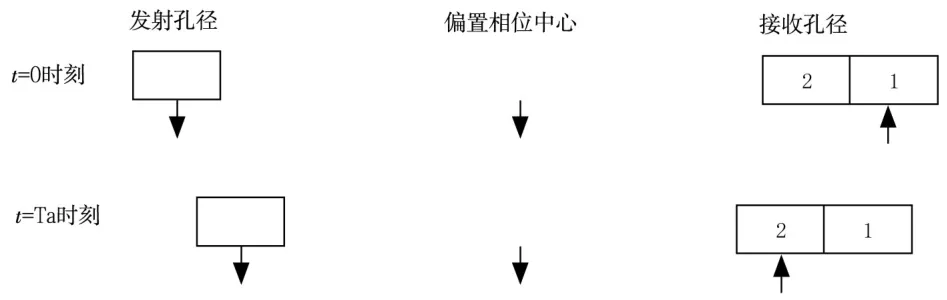
图1 双通道DPCA对消原理
1.2 前视SAR DPCA
由于前视SAR方位向具有多个收发天线阵列,所以将DPCA技术应用到前视SRA中时,不需要对雷达前端硬件进行修改,只需要对回波数据按照天线阵列进行分组即可得到两个子孔径的回波数据。但同时,还需要考虑的是这种简单的雷达回波数据分组是否可以满足DPCA对相位中心一致的要求,如果不满足则需要进行补偿。如果采用如图2所示的收发顺序即可满足双通道子孔径的相位一致。
如图2所示,收发同置前视SAR DPCA模式天线阵列分组为:(天线1、天线4)、(天线2、天线3)、(天线2、天线5)、(天线3、天线4)…。t=T0时刻,天线1发射,天线4接收,形成子孔径1;t=T1时刻,天线2发射,天线3接收,形成子孔径2;当t=T2时刻,天线2发射,天线5接收,形成子孔径1,以此类推。从图2中可见子孔径1、2的相位中心一致。

图2 收发同置前视SAR DPCA模式
2 前视SAR双通道微动目标回波模型
如图2所示,天线模块之间的距离可别表示为:

天线的等效相位中心为物理间距的一半,则可以认为相距为d的两个天线单独发射接收信号[3]。
在任意时刻t,可以将雷达前视目标到雷达的距离历程表示为:

则在任意时刻t,等效孔径与雷达前视目标的斜距可以表示为:

对式(4)进行配准,可以得到:

根据上文对雷达参数的假设,雷达回波可以表示为:
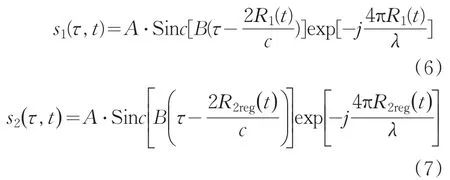
则可以得到方位向回波表达式:
3 双通道DPCA对消后信号特性
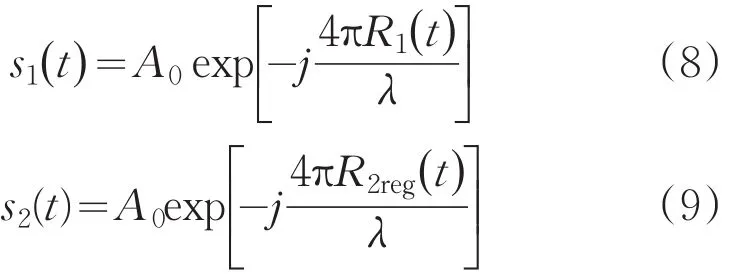
DPCA的思想是:对每个子孔径的回波进行对消,消除静止目标和背景的影响,从而达到动目标检测的目的[4]。令:
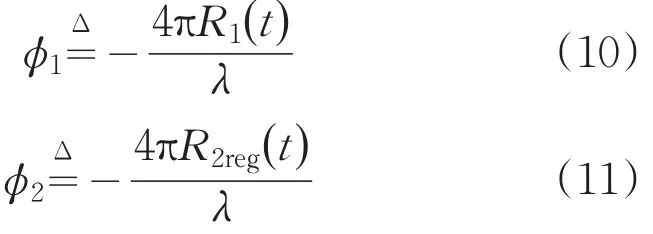
则R1(t)和R2reg(t)可以表示为:
由DPCA原理可知:

将式(12)、(13)代入式(14)可得:
将式(3)、(5)、(6)代入到式(15)之后并取模可以得到:
对式(16)进行泰勒级数展开可得:

由于前视SAR一次成像过程很短,则t的取值很小,而且由于目标属于微动范畴,所以ωt的取值非常小,则可以假设sinθ≈θ.同时假设
则式(20)成立的条件为:

其中,γmω为目标微动角速度所引起的瞬时线速度,对于式(19),本文所研究的微动目标的运动参数均可以满足,由式(17)可知,微动目标前视SAR回波信号经过DPCA杂波对消后的回波的幅度变换可表示为(|Asin(ωt+φ)|)的正弦函数形式,其中,A的取值受目标微动幅度和微动频率的影响。
根据式(16)还可以得到经过DPCA对消后的信号的相位特性:
由式(20)可知,DPCA对消后的相位特性也具有正弦调制特性,通过上述分析可知,前视SAR回波经过DPCA对消之后,信号的幅度和相位均具有正弦调制特性。
4 实验仿真
假设成像场景中存在一个微动目标和一个静止目标,为了便于分析,下面对于双通道DPCA的仿真只取两个通道的结果,因为第三个通道的结果同理可得。雷达参数见表1;目标运动参数如表2所示:

表1 雷达参数

表2 目标运动参数
仿真结果如图3所示,子孔径1和子孔径2的原始数据如图3(a)(b)所示,子孔径1的成像结果如图3(c)所示,子孔径2的成像结果如图3(d)所示,由图可知,在原始信号中,无法判别场景中是否存在微动目标。
图3 子孔径原始数据和成像结果
由图4可知,通过DPCA对消后,微动分量被保存下来,图中出现两个抛物线是由于在两次子孔径成像中,雷达载机一直在运动,所以导致两次成像的抛物线开口不一致,选用对雷达载机速度进行补偿,就可以解决此问题。

图4 DPCA对消后的结果
图5(a)为DPCA对消后沿方位向积累的结果,可以清楚的看出图像中峰值出现在微动目标所在的距离位置处。为了达到自动检测的效果,可设置一门限,门限取值为局部数据标准差的k倍,k的取值决定了检测的虚警概率,为了验证检测效果,采用各种SNR下的目标检测概率进行多次Monte-Carlo运算,得到的仿真结果如图5(b)所示。
由图5(b)可知,当回波信噪比大于-5dB时,微动目标检测概率达到95%。
图5 沿距离向积累结果
5 结论
本文将DPCA技术应用于前视SAR微动目标检测领域。首先分析了传统双通道SAR的DPCA对消原理,然后根据前视SAR的特性,提出了基于天线收发同置的前视SAR双通道DPCA模式,研究了前视微动目标回波经过DPCA对消后的信号幅相特性,确定微动目标所在的距离域,通过对对消后的数据在方位向上的积累对微动目标进行检测,通过仿真表面,当雷达回波信噪比大于-5dB时,微动目标检测概率达到95%
[1]Wu J,Huang Y,Yang J,et al.First result of bistatic forward-looking SAR with stationary transmitter[J]. IGARSS,Vancouver,2011:1223-1226.
[2]邓彬,吴称光,秦玉亮.合成孔径雷达微动目标指示(SAR/ MMTI)研究进展[J].电子学报,2013,12(41):2436-2441.
[3]罗运华,宋红军,王宇,等.基于精确二维频谱的调频连续波SAR动目标特性分析[J].电子与信息学报,2013,8(35):1834-1840.
[4]Cerutti-Maori D,Sikaneta I.A Generalization of DPCAProcessingforMultichannelSAR/GMTI Radars[J].IEEETransactionsonGeoscienceand Remote Sensing,2013,51(1):560-572.
[5]Wacks S,Yazici B.Bistatic Doppler-SAR DPCA imaging of ground moving targets[J].Radar Conference,IEEE 2014:1071-1074.
The Forward Looking Sar Micro-motion Targets Detection Methodbased on Dual-channel DPCA
CHEN Lei,CHEN Dianren
(School of Electronic and Information Engineering,Changchun University of Science and Technology,Changchun 130022)
It is aimed at the problem of forward-looking SAR micro-motion target detection in this paper.The traditional dual-channel SAR DPCA cancellation principle is analyzed and a dual-channel DPCA model of forward-looking SAR is proposed,the amplitude and phase characters of the signal after DPCA cancellation is studied,the distance domain of the micro-motion target is determined,then the micro-motion target detection is probability under different echo SNR with Monte-Carlo Operation,when the echo SNR is bigger than-5dB,and the target detection probability is greater than 90%.
forward-looking;DPCA;micro-motion;target detection;dual-channel
TN957
A
1672-9870(2016)06-0040-04
2016-08-16
陈磊(1985-),男,博士,讲师,E-mail:chenlei511@126.com
