基于圆筒攀爬车磁吸附设计的研究
2016-02-07孟宪宇王笠
孟宪宇,王笠
(长春理工大学机电工程学院,长春 130021)
基于圆筒攀爬车磁吸附设计的研究
孟宪宇,王笠
(长春理工大学机电工程学院,长春 130021)
圆筒攀爬车属于工业爬壁机器人的一种,能够在化工容器圆筒体的垂直壁面平稳灵活地移动,综合应用了普通地面移动机器设计与吸附设计。针对圆筒攀爬车的工作环境和自身性质选定吸附设计;在ANSYS MAXWELL14.0软件环境下,建立对应静磁场仿真模型,按对应环境参数设置变量并具体定量分析了现有设计在与壁面保持不同距离时整体所受磁吸附力大小的变化;讨论了吸附装置两种不同磁场布置的性能优劣。在实际工程实验中,检验了理论分析的结果,证实了吸附装置的运行可靠性,并为该型磁吸附装置的调节提供了依据。
圆筒;爬壁机器人;磁吸附;静磁场仿真
20世纪90年代以来,随着我国现代工业的飞速发展,国内多所著名大学、科研院所及企业相继投入研制开发爬壁机器人。爬壁机器人(wall climbing robot)是指可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,是在恶劣、危险、极限等情况下进行特定作业的一种特种自动化机械装置;因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人。爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种。其中负压方式可以通过吸盘内产生负压而吸附于壁面上,不受壁面材料的限制;磁吸附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。
爬壁机器人主要用于石化企业对圆柱形大罐进行探伤检查或喷漆处理,或进行建筑物的清洁和喷涂;在核工业中用来检查测厚等,还可以用于消防和造船等行业的设备维护及检查中。本文着重讨论应用于化工领域中圆柱形容器的履带式永磁吸附爬壁车的磁吸附技术。
1 圆筒和磁吸附攀爬车的结构及原理
圆筒储罐是储运设备压力容器的一种,应用具有导磁特性的钢板加工而成,一般采用普通低合金碳素结构钢材料,经卷制焊接并后处理形成圆筒形状,随后在圆筒外表面处理加工用于腐蚀防护的涂层或镀层。其中涂层材料主要成分为有机物,镀层材料为金属,个别镀层材料包含镍元素,而镀层的镍元素能够改变钢制壁面的导磁特性,本文分析讨论的圆筒壳体包括除外壁面采用含镍元素镀层外的绝大多数圆筒壳体。圆筒按壳体分类可分为厚壁圆筒和薄壁圆筒两类,工程上一般把壳体厚度与其中面曲率半径之比小于十分之一的归为薄壳,反之为厚壳。在化工企业中,需要用到爬壁机器人的场合多为中大型圆筒设备,所用钢板实际厚度多在5mm以上(或由多层钢板复合制成总厚度大于5mm的筒壁)。
由于薄壁圆筒每单位表面积对应的钢板(导磁材料)体积较小(使得吸附装置所能提供的磁力较小),装置达到同等吸附效果与同尺寸厚壁圆筒相比更加困难,故该工况的吸附条件典型且有代表性。本文以壳体中径为2800mm的应用于中型压力容器的较小的薄壁圆筒为例,对该工况圆筒攀爬车的吸附装置进行分析。
攀爬车在立式圆筒储罐壁工作时,自身重力由橡胶履带与钢制壁面所产生的静摩擦力(该条件下的静摩擦系数主要取决于所采用橡胶的配方和品种,本例中取橡胶与钢板的静摩擦系数为0.9)克服,该摩擦力大小取决于作为正压力的磁力径向分量(磁吸附力由吸附装置提供);在卧式圆筒储罐表面工作时,攀爬车自身重力由吸附装置所产生的磁力径向分量直接克服。两种工况中,前者对吸附装置吸附能力要求更高,因此本文分析研究圆筒攀爬车在立式圆筒储罐壁面的吸附情况。
本例中圆筒攀爬车采用铝合金结构设计,赋予整车框架铝合金材料,框架质量约为5.5073kg,折合重力55.073N,橡胶履带与钢筒壁面摩擦系数为0.9,所需磁吸附力FM1=G/0.9=61.192N;实际应用中将装载步进电机、伺服控制系统、通讯装置和无损(探伤)检测装置及其可能需要配置的几米到几十米长的中高压软管(可用于磁粉检测或渗透检测)或喷涂和清洗装置及其相配套的几米到几十米长充满液体的中高压软管,实际工况中一个完整的攀爬车的负载大于26kg折合重力254.8N,即所需额外磁吸附力FM2=G/0.9=283.1N。综和考虑必要的安全余量,吸附装置必须能够提供300N及300N以上的磁吸附力。该设计的吸附力指标定为300N。
基于圆筒壁导磁性质,结合吸附力指标、磁吸附机器人吸附功能和应用条件特点,确认采用永磁吸附设计。
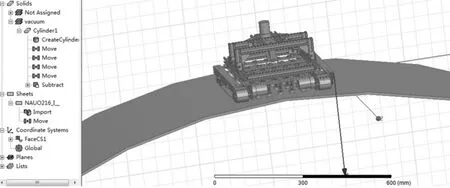
图1 攀爬车工况模型
所采用履带式磁吸附攀爬车结构如图1所示,主要由传动部分和吸附装置构成。攀爬车重力由其橡胶履带与钢材的摩擦力克服,该摩擦力最大值大小由作为正压力的磁吸附力决定,方向沿圆筒轴向竖直向上(图1中z轴正向)。为保证攀爬车稳定吸附于壁面不脱落,需要确定吸附装置的吸附能力。吸附装置的吸附能力取决于每组吸附单元产生的磁吸附力大小,而磁吸附力大小与吸附单元和所附着钢板间的间隙距离紧密相关。攀爬车模型如图1所示图2中每个永磁体圆环单元底面外径20mm,内孔直径6mm,高10mm,倒圆角后,体积约2713立方毫米,共(4排5列)20个永磁体单元。橡胶履带与钢筒壁面摩擦系数取0.9。
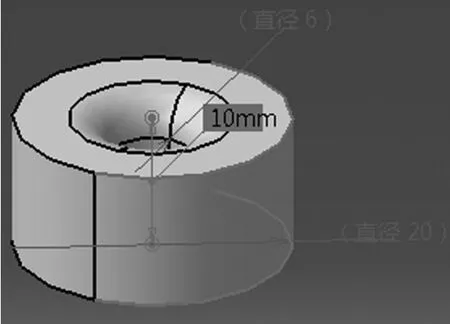
图2 永磁体单元
2 ANSYS MAXWELL仿真分析
2.1 设定材料几何参数
针对该情况下需求,使用Ansys software Maxwell(version14.0),建立磁吸附模型,(从设计安全性和可靠性角度出发,本例中钢板厚度取攀爬车其他参数一定,所受磁吸附力最弱时的最小厚度)选定圆筒壁厚为5mm,出于对圆柱形容器外表面存在的无导磁特性的涂层或镀层的考虑,按实际工况保留一定设计余量,故将永磁体与钢板间距定在0.2mm以上,因除磁体外小车主要采用铝合金或其他无导磁特性制造,故忽略其他零件导磁性不计。
由分析可知小车永磁体组模块前后对称,故取2排5列(10个)永磁体单元进行仿真,计算整体装置一半的磁场力。并设定percentage offset为100%的静磁场(magnetostatic)求解域模型如图3所示,由于距离永磁体20mm以上处钢板所受吸附力小于1%,故忽略部分钢板体积,精简后如图4所示。
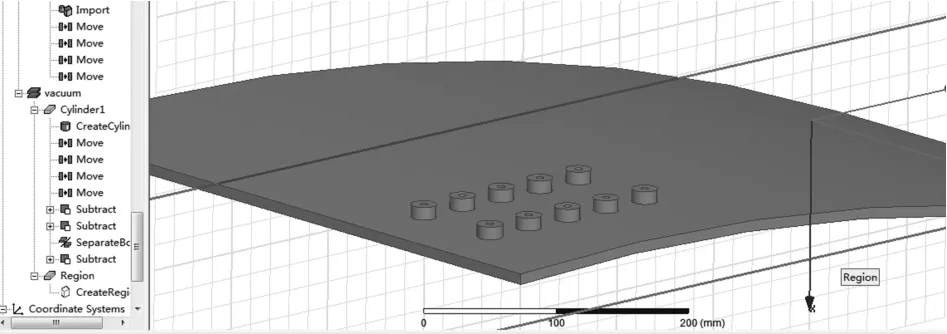
图3 永磁体组初建模
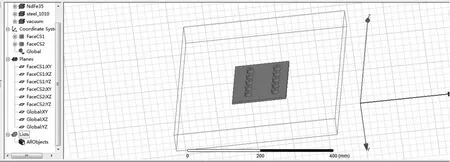
图4 最终计算模型
2.2 材料属性设置
吸附装置将在空气,永磁体,吸附壁面中运行。
2.2.1 永磁体
选定(NdFe35)烧结钕铁硼永磁材料,其性能参数如下表1所列,建模中磁体沿轴向(x轴正方向或负方向)磁化,为获得较大磁吸附力,改进了永磁体排列方式,使永磁体组中各个相邻单元磁化方向反向排列。
2.2.2 空气
空气导磁率与与真空基本相同,为4π×10-7H/m,相对磁导率μ=1.0000004;
本例中取空气相对磁导率μ=1.0,在空气域(Region)中仅定义电场和磁场,不设置重力场或其他无关力场。
2.2.3 钢材壁面
受实际工作表面影响,本例中被吸附钢材取用美国ASTM A576(与GB711中10号钢完全一致)中优质碳素结构钢steel1010,其B-H曲线如图5所示。

表1 永磁体参数
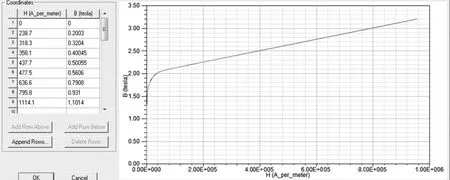
图5 Steel1010的B-H特性曲线
2.3 参数化扫描设置
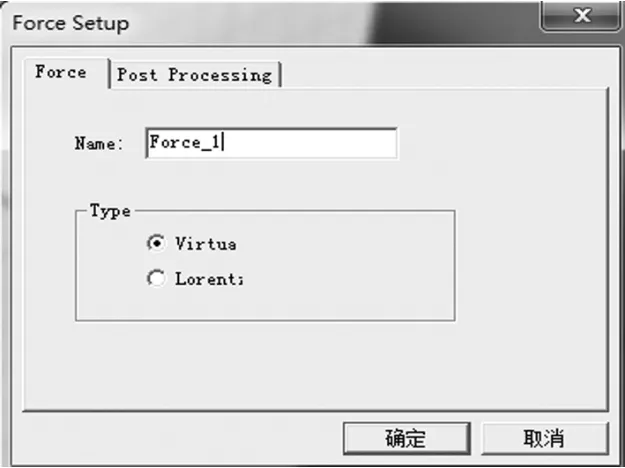
图6 钢板所受力设置
如图6所示,定义钢板所受场力为Force_1(virtua)(宏观上空气域中无洛伦兹力),钢板无外加电荷,设定钢板与永磁体最小间距为0.2mm+mx(实际工况中圆筒壁面必然存在无导磁性涂层或镀层,故保留0.2mm非导磁层余量),定义变量mx为0.1mm~1.7mm(图6),每0.2mm一步(perlinear step)执行第一次参数扫描。使用maxwell14.0仿真模拟出图2中定义的空气域(Region)内的磁场分布,而后单击parameter analysis令软件根据空气域内的磁场分布和间距设置分别准确计算出不同间距下钢板所受空气域内力场(即磁场)作用力大小即Force_1;便得到图10所示磁场力虽间距mx大小变化的曲线。
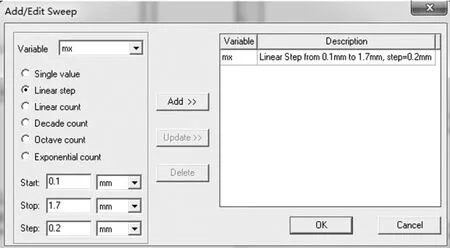
图7 变量定义

图8 磁化方向设定
为确定永磁体组中各个相邻单元磁化方向反向排列是否具有更强磁吸附能力,重新统一定义所有磁体磁化方向为x轴负方向,如图8所示,保持变量mx不变,执行第二次参数扫描;
重新定义变量(图9)mx为1.7mm~3.9mm,每0.2mm一步(per linear step),执行第三次参数化扫描分析,分别进行磁场力计算,如图10-12所示。
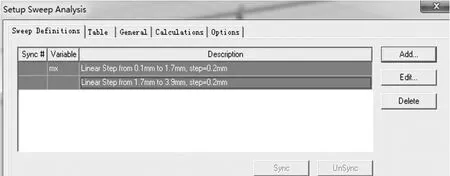
图9 添加变量变化范围
2.4 仿真结果分析

图10 永磁体单元磁化方向沿轴线完全平行反向时的磁力-间距曲线
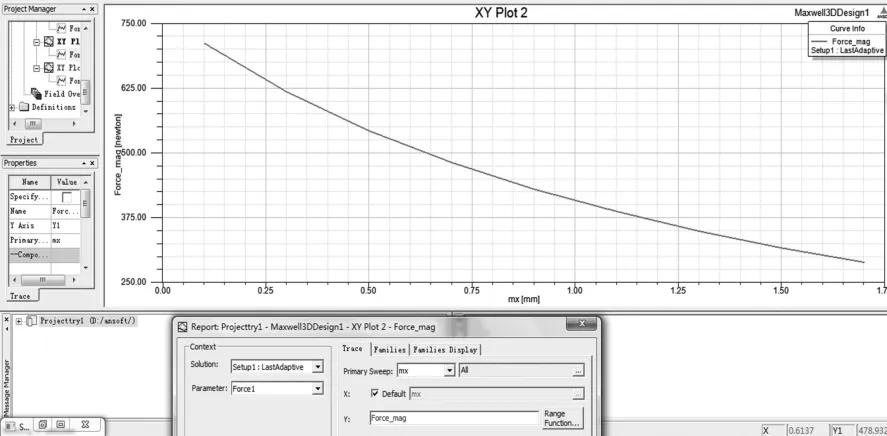
图11 永磁体单元磁化方向一致时的磁力-间距曲线
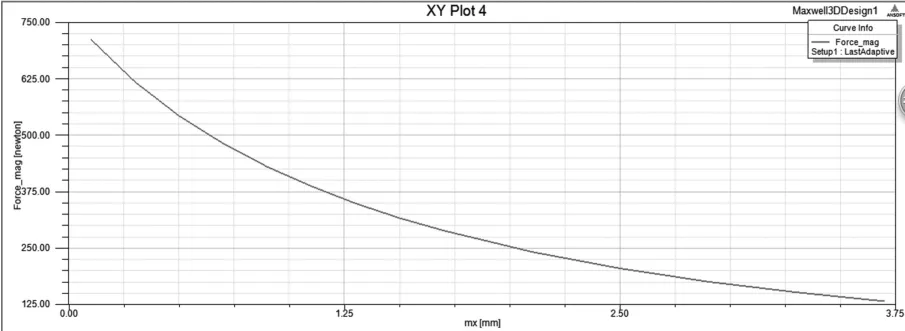
图12 间距变化幅度较大(0.3~3.7mm)时的磁力-间距曲线
2.4.1 间距对磁场吸附力的影响
在永磁体单元总数(20)和所行走壁面厚度(5mm)一定条件下,对吸附装置磁吸附力随间距参数mx变化的规律进行了分析。
从图10和图11中曲线可知,磁吸附力在0.2mm~1.45mm随距离变化显著,由800N陡降至375N,磁力随距离增大而迅速减小,依然大于所需吸附力值61.2N。
工作条件下,磁场力随磁体与钢板间距变化关系如图12所示,在间距大于(1.25+0.2)1.45mm后,磁场力随间距mx变化趋于平缓,大于3.7mm小于4.1mm时,磁力基本稳定在125N,大于整车所需正压力61.2N,能够保证该结构下圆筒攀爬车在壁面上稳定吸附而不脱落。
2.4.2 永磁体磁极排列方式对磁吸附力的影响
对比图11和图12,可发现相邻永磁体磁化方向互相平行且相反时,相较所有永磁体磁化方向统一情况下磁场力增大接近100N。在图11中,可发现磁化方向统一的排列方式对应的曲线整体向下偏移近100N,故该磁极排列方式对磁吸附能力的改善是一固定值。
2.4.3 吸附装置校验
如图10中磁力-间距曲线所示,当吸附间距在1.75mm以内时,吸附装置能提供330N以上的吸附力;如图11所示,即使永磁体单元磁化方向一致,当吸附间距在1.35mm以内时,吸附装置也能提供300N以上的吸附力;该吸附装置达到吸附力指标要求,设计合格。
3 实验论证
按照预先材料加工制造的由铝合金框架、标准螺栓及螺母、橡胶制履带、钕铁硼磁体加工装配而成的圆筒攀爬车吸附实例如图13所示,圆筒壁为中型圆筒容器的局部,吸附装置中永磁体单元磁化方向沿轴线完全平行反向,理论上对应于图10所示曲线;
在图14中,可见当仅一半永磁体组与壁面间距保持在2.5mm~3.75mm时,圆柱攀爬车稳定吸附于钢制圆筒而不坠落;该实验现象有力地支持了前文仿真分析的初步结果。
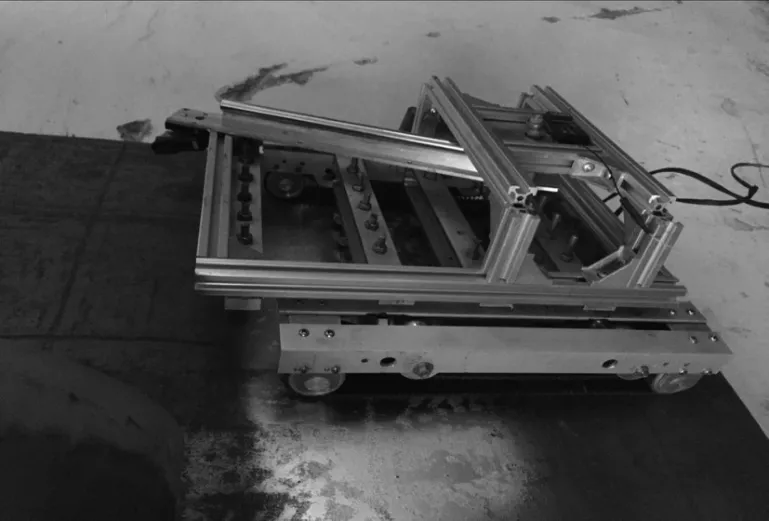
图13 圆筒攀爬车吸附试验
两图中机构均未包含实际工况下所必需装备的电动机、各种检测模块、通讯模块和供电模块(如通信及供电线缆)等较大质量负载,考虑到风载荷等安全余量影响因素;为确保圆筒攀爬车平台实际运行中安全可靠,质量为27kg、57kg和73kg的重物块被分别系于吸附装置永磁体组对应设置了1.7mm、0.8mm和0.3mm间距的攀爬车铝合金框架,以校验仿真分析的图表结果。
先将间距mx手动调整至1.7mm,手动分别旋合用于固定永磁体的10个螺栓连接,观察到所有受调整螺栓上所套弹簧受力绷紧后,确定间距调整完成;随后固定履带和小车,加载(系上)27kg负载,观察到车体几乎没有移动,证实可行。再将间距mx调整至约0.8mm,加载57kg负载,观察结果同上。最后将间距mx调整至约0.3mm,加载73kg负载,观察结果同上。实地实验的3个结果基本符合软件计算并生成的磁力-间距曲线上对应的3个标志性点(图10曲线上接近两端和中点处)的数据,证明了前文仿真分析结果的正确性。

图14 吸附实况(近景)
结合上述实验过程和图14中显示的吸附装置结构,显然,在现有吸附装置基础上可以加装或者改装一个适用的伺服机构,参考壁面弧度并按控制要求实现单个或局部分别旋动这些螺栓,借鉴于千分尺工作原理,通过调控螺栓连接的旋合圈数就可以实现不同精确程度的吸附装置(永磁体)与壁面的间距控制。从而使攀爬车:1)在更厚的圆筒壁面工作时可以参考图9-12可以适当提高间距;2)在不同大小(即不同半径,不同弧度)的圆筒表面,可以实现近似圆弧的永磁体单元空间排布;3)在攀爬车负载随时间变化情况下,借助控制系统能够几乎实时改变吸附装置的间距;以减小多余的摩擦力,进而既能够保证攀爬车的稳定吸附,又能降低动力装置的电动机耗功减小攀爬车主框架结构上的不必要的应力,提高圆筒攀爬车的使用寿命。
4 结论
(1)运用有限元计算软件ANSYS MAXWELL对该车进行仿真模拟,预测了吸附装置与圆筒无焊缝壁面间距参数变化对整车所受磁吸附力的影响,反映了工作条件下吸附装置整体相对圆筒壁面升降时整车吸附的可靠性,为吸附装置相对壁面高度的调节幅度提供了依据。
(2)综合图表结果及实验经验,该圆筒攀爬车除本体外,正常吸附状态下还可以承载质量小于73kg的负载重物。
[1]郑津洋,董其伍,桑芝富,等.过程设备设计[M].北京:化学工业出版社,2010.
[2]丁欣硕,凌桂龙.Ansys workbench14.5有限元分析案例详解[M].北京:清华大学出版社,2014.
[3]王尧,冯伟东.清洗爬壁机器人国内外研究现状的综述[J].机械工程师,2015(3):144-146.
[4]张学忱,陈锦昌.三维工程制图:产品三维建模技术与应用[M].北京:高等教育出版社,2009.
[5]sw0662,磁铁牌号及性能参数[EB/OL].http://wenku.baidu.com/link?url=xOE2Ti4O_-KZUCPiDK8Tx-UcQXlihU-8qT3mmIg4oaFRj7jgNMyokyk6WFFVT J-Ba72LYvhyDvEGR6IkPymTUE9V57Kvmz-mW5q 31PkTMcia,2014-01-26.
[6]闫康平,陈康民.过程装备腐蚀与防护[M].北京:化学工业出版社,2009.
[7]高云鹏,赵增强,房晶晶,针对大型圆筒形工件的喷漆机器人应用工程[J].制造业自动化,2010(10):97-100.
[8]薛胜雄,任启乐,陈正文,等.磁隙式爬壁机器人的研制[J].机械工程学报,2011(21):37-42.
Research on Magnetic Adsorption Design of Wall Climbing Robot for Cylinders
MENG Xianyu,WANG Li
(School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022)
The wall-climbing vehicle for cylinders is a kind of wall-climbing robots that are enable to move neatly and steadily on vertical wall of a chemical cylindrical vessel according to the theories of magnetic design and mechanical design.Referring to the working environment and the adsorption device of wall climbing vehicle for cylinders,a numerical model was established to adapt its magnetostatic field simulation in software.The variations of the force with different parameters on distance,which between the device and the wall,was assigned and analyzed quantificational by using Ansys maxwell14.0.An actual experiment was completed to verify the analysis.This passage demonstrated that the magnetic absorption is reliable and provided an adjustment reference to the adsorption device.
cylinders;wall climbing robot;magnetic adsorption;magnetostatic field simulation
TH164
A
1672-9870(2016)06-0031-05
2016-09-23
孟宪宇(1980-),男,硕士,讲师,E-mail:mengxianyu@cust.edu.cn
