双通道SFCW生物雷达对静止人体目标探测方法的研究
2016-02-07张卓然梁福来李浩楠吕昊祁富贵安强王健琪
张卓然,梁福来,李浩楠,吕昊,祁富贵,安强,王健琪
第四军医大学 a.学员一旅四营十六连;b. 生物医学工程学院医学电子学教研室;c. 学员一旅二营五连,陕西西安 710032
双通道SFCW生物雷达对静止人体目标探测方法的研究
张卓然a,梁福来b,李浩楠c,吕昊b,祁富贵b,安强b,王健琪b
第四军医大学 a.学员一旅四营十六连;b. 生物医学工程学院医学电子学教研室;c. 学员一旅二营五连,陕西西安 710032
生物雷达是以探测生命体为目标的新概念雷达。静止人体的生命体征由于障碍物的衰减作用,呈现信号微弱、受环境杂波干扰较大的特点,这就使生物雷达对人体目标的探测性能降低。本研究采用双通道步进频率连续波(SFCW)雷达改善该问题,首先建立生命体征信号的SFCW回波模型,然后分析SFCW雷达参数对探测性能的影响,最终提出了基于双通道SFCW生物雷达的静止人体目标探测方法。本方法首先利用预处理去除系统和传输信道引入的干扰,然后通过通道间相干处理进一步抑制环境杂波,最后利用CFAR检测器、形态学滤波和聚类算法对生命体进行探测与定位。实测数据处理结果表明,双通道SFCW生命探测雷达系统可有效去除杂波干扰,实现人体目标的高性能探测与定位。
生物雷达;步进频率连续波;双通道;静止人体
0 引言
生物雷达是以探测生命体为目标的新概念雷达,它融合了雷达、生物医学工程等技术,是未来极具应用前景的发明之一。生物雷达发射的电磁波能穿透障碍物,检测到静止人体目标的呼吸、心跳等生命体征引起的体表微动,并以此为依据探测和识别人体目标。它可广泛应用于灾后搜救、反恐处突、临床监护等场合,对保障人民群众的生命安全具有重要作用[1-2]。
现有的生命探测雷达从体制上可分为连续波(Continuous Wave,CW)体制[3]和超宽带(Ultra Wide Band,UWB)体制[4]两类。UWB雷达因具有高距离分辨率、较强的穿透能力和良好的近场性能,很快成为生物雷达技术的研究热点。早期的单通道UWB生物雷达一般采用冲激信号体制,结构简单、便携性好。第四军医大学研究小组在国内较早开展了单通道UWB冲激生物雷达技术的研究,成功探测到2 m厚废墟下的静止人体目标[5]。研究表明,降低中心频率能提高UWB生物雷达的穿透能力。但是对于UWB冲激生物雷达而言,中心频率越低则实现大带宽的难度越大,距离分辨率也越差,不利于体表微动的检测。步进频率连续波(Stepped-frequency Continuous Wave,SFCW)雷达将各频率点分时发射,降低了雷达收发系统的实现难度,可同时实现低中心频率和大带宽,SFCW还在平均发射功率等方面具有一定优势。因此,部分学者尝试将SFCW雷达应用于人体目标探测中。Liu等[6]建立了SFCW模拟实验系统,验证了SFCW生物雷达在人体目标检测以及对呼吸、心跳信号提取方面的可行性。土耳其高技术国际实验室(International Laboratory for High Technology,ILHT)开发了基于SFCW信号的UWB雷达样机,能够穿透三层砖墙探测到呼吸和心跳信号[7]。上述研究表明SFCW体制的生物雷达将成为重要的发展方向,但它并没有对SFCW系统参数的影响作细致分析。
虽然上述单通道生物雷达取得了较大的进展,但在实际应用中仍面临以下问题:微弱的人体生理体征信号容易受到周围环境杂波的干扰,从而使现行的生物雷达检测性能下降。所以部分学者将研究重点转向多通道生物雷达系统。Takeuchi等[8]探索了二维天线阵列对人体目标的定位技术,Lubecke等[9]证明利用多通道CW雷达使多个人体目标探测具有可行性。上述研究在一定程度上说明,通道间的信息融合能够提高人体目标的检测性能。
在以上研究的基础上,本文分析了SFCW生物雷达生命体回波的信号模型以及SFCW生物雷达系统参数对生命探测性能的影响,提出了一种双通道SFCW生物雷达对静止人体目标的探测方法,实测数据处理结果验证了本文理论分析和算法的有效性。
1 生命体征信号SFCW回波模型
人体体表的微动可近似为几组简谐振动,即天线相位中心到人体胸腔表面的瞬时距离可表示为

其中,t为快时间,τ为慢时间,b0为天线到人体胸腔振动中心的距离,Ar,p表示人体呼吸微动幅度,fr,p表示人体呼吸微动频率,res(t+τ)表示除呼吸外其他人体微动引起的距离变化。人体胸腔表面反射的雷达回波时延可表示为2Rp(t,τ)/c,其中,c为光速。
假设发射SFCW信号为ST(t),则生物雷达回波信号为

其中,c为光速,P为人体目标的个数,δ(·)为狄利克莱函数,为卷积算子,Rp(t,τ)为人体目标到雷达天线之间的距离。
将SFCW回波信号与参考信号混频,并通过窄带中频滤波器经过中频解调后,人体目标的回波信号为
其中,f0为信号起始频率,Δf为频率采样间隔,Tr为每个发射频点的时间间隔,N为频点个数。由式 (3) 可知,回波信号的相位包含了目标的位置信息。假设在t0=nTr+ 2R0/c处进行采样,取出一组频点信号的采样值为

在慢时间τ0处,对式 (4) 中的数据沿频率采样方向进行N点逆傅立叶变换(Inverse Fast Fourier Transform,IFFT),得到目标的一维距离像为

沿慢时间方向进行离散采样,即得到不同通道的回波采样矩阵yi(k,l),其中,k为快时间采样序号,l为慢时间采样序号,i= 1,2为通道序号。
2 SFCW生物雷达系统参数分析
2.1 频率采样间隔
由式可知,回波距离像的峰值位置为k0= 2NRp(t0,τ0) Δf/c,表示目标对应的距离为Rp(t0,τ0)= ck0/(2NΔf)。由于三角函数的周期性,|y(k,τ0)|以周期为N呈周期性变化,因此相距为c/(2Δf)整数倍的目标一维距离像是重合的,即SFCW雷达生物距离像存在距离模糊,且不模糊距离为Ru= c/(2Δf)。在模糊距离之外的生命体将更加难于探测,原因在于远距离处的生命体征信号经距离衰减之后将远弱于近处模糊距离范围内的杂波,将其折叠入不模糊距离内与强杂波叠加到一起,加剧了杂波对生命体征信号的污染。考虑到生物雷达一般作用于近场,目前生物雷达作用距离一般不超过30 m,因此要求Δf≤5 MHz。
2.2 慢时间重复频率
人体呼吸频率fr一般在0.2~0.5 Hz之间,为满足奈奎斯特采样定理,雷达系统的慢时间采样频率fs应满足fs≥2fr。SFCW信号的慢时间采样频率为1/NTr,Tr一般为μs量级,N的量级一般为千,因此SFCW信号的慢时间采样频率一般在kHz量级,要远大于2fr,能够满足生命探测的需要。过高的慢时间采样频率将造成严重的数据冗余,增加运算负担,所以需进行慢时间降采样处理,降低运算负担并增加信杂比。
2.3 采样点位置
假设采样间隔为Ts,为保证每个发射频率点至少有一个采样值,需满足条件Ts≤Tr。设采样波门从信号发射时刻开始,每个脉冲采样得到K个值,则其中表示向下取整,这样每一帧信号可以得到N×K个采样值。由式(4)可知,若将采样点序列变为t1,取出一组频点信号的采样值为

可见,对微动目标而言,选取不同采样时刻,不会对回波中提取的目标运动信息造成影响,因此每个频点的回波数据仅需采集一个采样点即可得到目标的距离像信息。
3 双通道SFCW生物雷达静止人体目标探测
双通道SFCW生物雷达信息处理流程,见图1。处理过程主要包括预处理和人体目标检测两部分。

图1 双通道SFCW生物雷达信息处理流程
3.1 预处理
雷达回波预处理的主要目的是去除系统和传输信道引入的干扰,形成高分辨率一维距离像。雷达回波预处理主要包括系统校正、距离压缩、去背景、低通滤波、自适应滤波和慢时间快速傅立叶变换(Fast Fourier Transform,FFT)等关键步骤。
一般将天线子系统与射频子系统这两部分的校正分开进行。天线色散校正一般采用微波暗室测量数据,估计天线色散函数,为降低测量数据的噪声污染,一般需做多次测量平均处理。射频子系统传输特性补偿常采用闭环校正的方法,即在系统联调时旁路发射和接收天线,将发射信号衰减后直接馈入接收机,获得发射信号和接收信号的频谱,从而估计出射频子系统的传输函数。由前文可知,通过对回波数据进行快时间向的IFFT运算,可以得到高分辨距离像。由于SFCW信号相当于离散频率采样,其距离向旁瓣较高,需对频谱进行加窗处理。
由于时间基线容易不稳定,从而在慢时间方向形成线性趋势,可采用线性趋势消除(Linear Trend Subtraction,LTS)去除静态背景杂波[10]。强静态杂波通常会淹没呼吸微动信号,一般情况下,人体呼吸的频率范围在0.2~0.5 Hz,心跳的频率范围在1~2 Hz。所以,可采用带通滤波器进行慢时间域滤波,通带范围选在0.2~2 Hz。在带通滤波器的通带范围内,仍存在微动干扰成分,一般是由环境中的微动物体引起,如风吹草丛、树叶引起的摆动,其多普勒谱分布较宽,在生命体征信号频带范围内也有一定分布。由于环境的不稳定性,该类杂波不做规则的正弦运动,与生命体征信号存在明显差异。本文采用自适应滤波进一步增强生命体征信号,抑制动态环境杂波。最后,进行慢时间域FFT,得到双通道信号在距离-方位频率域的图像。Ii(n,m) ,i= 1,2;n= 1,2…,N;m= 1,2…,M。FFT变换能够凸显强周期信号,因此可显著提高生命信号的信噪比。
3.2 双通道信号相干处理
由于通道间存在差异,生命体征信号在双通道间并不一致,主要体现在两方面:① 信号的位置差异;② 信号的幅度差异。其中,位置差异对后续处理的影响较大。双通道间的位置差异Dtc由双通道硬件系统引入的时间差异Δth和传输路径不同引入的差异Δtr组成。由硬件系统非理想造成的时延差异如下式

其中,ΔtTR为收发系统引入的通道间时延差异,Δtline为传输线引入的时延差异,Δtant为天线引入的时延差异。
由于生命探测雷达的收发天线间隔小,距离墙体较近,其回波信号中一般包含有较强的耦合信号。耦合信号主要包括雷达系统内部耦合、收发天线间的耦合以及墙体的直达波等。若各通道紧贴墙体,则墙体直达波在不同通道中的时延大致相同,因此可以通过不同通道间耦合位置的差异估计。对双通道距离像数据进行平均,获得参考距离像为

其中,yi(k,1)为第i个通道的距离像的慢时间序列,Li为获取i通道参考距离像使用的慢时间采样个数。计算S1和S2的相关函数为

其中,S1(n)为S1(k)的离散频谱,K'为IFFT点数。由式(9)可知,搜索得到r(k)模值最大值点的位置kmax即可根据式(10)估计得到两个通道信号间的时间偏移,进而可以利用消除两个通道回波间的时间偏移。

Δtr与目标的位置有关,在MIMO雷达信号处理中,根据多个通道间的Δtr能够推导出目标的位置。在本系统中,双通道雷达的位置较近,因此Δtr较小。若对数螺旋天线直径0.2 m左右,发射机置于中间,两部接收天线置于发射天线两侧,天线主波束宽度为30°时,目标的Δtr< 0.1 m,接近于雷达系统的距离分辨率,因此对于一般的生物雷达而言,可忽略Δtr的影响。若生物雷达系统的天线波束较宽,可采用图像配准的方法估计双通道之间的相对时延。校正时延后将双通道的对应像素幅值相乘

3.3 人体目标检测
通过双通道信号的相干处理后,杂波得到进一步抑制,人体生命体征信号得到进一步增强,使自动检测与定位成为可能。人体均匀呼吸时,其回波信号在慢时间向近似为理想单频信号,在呼吸频率处存在能量峰值。但在实际应用中,由于人体呼吸并不均匀,导致呼吸信号的部分能量扩散到临近的频率处,所以呼吸信号在慢时间频谱上具有一定的带宽范围。与之类似,呼吸运动引起一定区域内的胸壁起伏,因此在一定距离范围内生命体信号较强。
上述分析表明,生命体征信号在距离-慢时间频率域上体现为具有一定尺寸的块状目标,并且经过双通道相干处理后的生命体征信号在局部区域内强于周围环境杂波,因此可采用恒虚警率(Constant False Alarm Rate,CFAR)一类的局部检测器得到初步筛选结果。CFAR算法通过滑动窗实现,将待检测的像素放置在滑动窗的中心,滑动窗由保护窗(图2中实线框)和杂波窗(图2中的虚线框)组成。滑动窗的尺寸由生命体征信号的性质、距离采样间隔和慢时间频率采样间隔共同决定。CFAR的具体过程为首先统计保护窗与杂波窗内环形窗体内环境杂波的分布模型,然后基于估计的杂波模型和给定的虚警率计算CFAR的门限值。幅值超过门限的像素视为目标的一部分,其判定过程如下式[11]


图2 距离-慢时间频域上的生命体征信号
CFAR处理结果中存在一定数量的杂波和噪声。其中,噪声由于具有强的随机性,在CFAR图像中通常表现为小尺寸的亮点,而面积较大的动态杂波干扰在CFAR图像中表现为大尺寸亮斑。上述两种干扰与生命体征信号的尺寸存在明显差异,所以本文对CFAR结果进行形态学滤波滤除上述两类杂波[12]。
生命体判别及定位则由聚类算法实现。假如场景中有P个人体目标,则应存在P个聚类中心{μ1,μ2…,μP,}。CFAR结果中的V个非零像素点{ρ1,ρ2…,ρV,}分布在P个聚类中心周围。本文采用二分K-均值聚类方法实现聚类,其具体实现过程如下:首先将所有点作为一个簇,计算簇中第i点到聚类中心的距离Di1= ||μ1-ρi||2,利用距离聚类中心在聚类半径dc内的点迭代计算更新聚类中心的位置其中m1为簇中非零像素点的个数;然后将簇一分为二,进一步迭代计算两个簇的聚类中心;选择均方误差最大的一个簇将其划分为两个簇;不断重复上述划分过程,直到通过进一步划分不能降低均方误差为止。根据人体尺寸的先验信息,聚类半径设为0.6 m。聚类中心的位置给出了生命体目标的位置与呼吸频率信息。
4 实测数据结果分析
第四军医大学研究小组自1998年开始研究生命探测雷达的相关工作,成功研制了包括超宽谱冲激生物雷达[13]和SFCW生物雷达系统在内的系列生物雷达系统,见图3。本文使用的实测数据由双通道生物雷达系统获取,其系统参数:工作带宽500~3500 MHz,距离分辨率5 cm,不模糊探测距离5 m,发射功率≥10 dBm,接收机灵敏度-80 dBm,接收机动态范围≥50 dB。

图3 双通道SFCW雷达系统实物图
穿墙探测试验场景,见图4。砖墙厚度约为24 cm,被测人员正对雷达天线,静坐于墙后4 m距离处。数据采集过程中,人体保持正常呼吸状态,周围环境稳定,无明显扰动目标的干扰。相比于站立的静止目标,静坐的人体目标体动更小,检测难度更大。

图4 穿墙探测试验场景
在两个通道的原始回波中,直达波的位置有一定差别,该差别反映了双通道系统间的时延差别,见图5。使用本文方法进行时延校正后,降低了双通道间的时延差别。
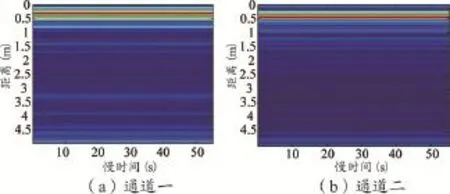
图5 原始回波
经过预处理后,静态杂波得到一定抑制,但通道一和通道二中仍存在较多残余杂波,见图6。经过双通道相干处理后,杂波得到进一步抑制,见图7(a),此时疑似生命体征信号得到凸显。再经过CFAR处理后,疑似生命体征信号在CFAR结果中更加明显,见图7(b)。形态学滤波将尺寸明显大于和小于生命体征信号的杂波滤除,见图7(c)。聚类算法能够将一定范围内的疑似目标点划分到一个簇中,并估计得到疑似生命体的位置,见图7(d)。

图6 预处理结果

图7 双通道相干处理结果
5 结论
SFCW生物雷达能够对静止人体目标进行非接触探测与定位,但在实际应用中仍存在强杂波干扰的问题,会使生物雷达的探测性能降低。本文系统分析了双通道SFCW生物雷达的系统参数影响,并提出了一套完整的信息处理流程,实测数据处理结果表明双通道SFCW生物雷达可提高对静止人体目标探测的性能,具有广阔的应用前景。
[1]Li J,Liu L,Zeng Z,et al.Advanced signal processing for vital sign extraction with applications in UWB radar detection of trapped victims in complex environments[J].IEEE J Selected Topics Applied Earth Obs Remote Sens,2013,7(3):783-791.
[2]Withington P,Fluhler H,Nag S.Enhancing homeland security with advanced UWB sensors[J].IEEE Microw Mag,2003,4(3):51-58.
[3]Chen KM,Huang Y,Zhang J,et al.Microwave life-detection systems for searching human subjects under earthquake rubble or behind barrier[J].IEEE Trans Biomed Eng,2000,47(1):105-114.
[4]Barnes MA,Nag S,Payment T.Covert situational awareness with handheld ultra-wideband short pulse radar[J].SPIE,2001,(4374):66-77.
[5]Li Z,Li W,Lv H,et al.A novel method for respiration-like clutter cancellation in life detection by dual-frequency IR-UWB radar[J].IEEE Trans Microw Theory Techn,2013,61(5):2086-2092.
[6]Liu L,Liu S.Remote Detection of Human Vital Sign With Stepped-Frequency Continuous Wave Radar[J].IEEE J Selected Topics Applied Earth Obs Remote Sens,2014,7(3):775-782.
[7]Vertiy AA,Voynovskyy IV,Özbek S.Microwave through-obstacles life-signs detection system[EB/OL].[2016-03-17].Available from:http://www.mam.gov.tr/eng/institutes/me/me-uytl.htm.
[8]Takeuchi T,Saito H,Aoki Y,et al.Measurement of survivor location by using GPR with two dimensional array antenna[J]. SICE Annual Conference,2008:2082-2087.
[9]Boric-Lubecke O,Lubecke V,Host-Madsen A,et al.Doppler radar sensing of multiple subjects in single and multiple antenna systems[J].Proc 7th Int Conf Telecommunications in Modern Satellite,Cable and Broadcasting Services,2005,1:7-11.
[10]Nezirovic A,Yarovoy AG,Ligthart LP.Signal processing for improved detection of trapped victims using UWB radar[J].IEEE Trans Geosci Remote Sens,2010,48(4):2005-2014.
[11]Oliver CJ.Understanding Synthetic Aperture Radar Images[M]. Boston:Artech House,1998.
[12]Pham QH,Brosnan TM,Smith MJT,et al.A morphological technique for clutter suppression in ATR[C].Automatic Target Recognition VIII.Orlando:Proc SPIE,1998:367-374.
[13]Lv H,Lu GH,Jing XJ,et al.A new ultra-wideband radar for detecting survivors buried under earthquake rubbles[J].Microw Opt Technol Lett,2010,52(11):2621-2624.
Research on Application of Dual-Channel SFCW Bio-Radar in Detection of Static Human Targets
Bio-radar,which is aimed at detection of vital signs,is an emerging concept. The vital sign of static human becomes weak and easily interfered by the surrounding environment due to the attenuation of the obstacles,which makes it diffcult for bio-radars to obtain the high performance in detection of static human body. Dual-channel SFCW (Stepped-Frequency Continuous Wave) radar is used to improve this problem in this paper. The dual-channel SFCW echo model of vital signs are established firstly,and then the infuence of the SFCW radar parameter on the detection performance is analyzed. On this basis,a new method of static human body detection based on dual-channel SFCW radar is proposed. In this method,preprocessing is used to suppress interference,and then dual-channel coherence is adopted to further suppress environmental clutter. The CFAR detector,morphological filtering and clustering are applied in detection and localization of static human. Experimental results show that the proposed method can effectively suppress clutter and improve the detection performance.
bio-radar;stepped-frequency continuous wave;dual-channel;static human
ZHANG Zhuo-rana,
LIANG Fu-laib,LI Hao-nanc,LV Haob,QI Fu-guib,AN Qiangb,WANG Jian-qib
a. Company 16,Battalion 4,No. 1 Cadet Brigade;b. Teaching and Research Section of Medical Electronics,School of Biomedical Engi neering;c. Company 5,Battalion 2,No. 1 Cadet Brigade,the Fourth Military Medical University,Xi’an Shaanxi 710032,China
R318.6;TN95
A
10.3969/j.issn.1674-1633.2016.09.007
1674-1633(2016)09-0029-05
2016-03-17
2016-05-18
国家科技支撑计划(2014BAK12B02);国家重大科研仪器设备研制专项(61327805);陕西省自然科学基金(2014JQ2-6034)。
梁福来,博士,讲师,主要研究方向:生物雷达信号处理。
通讯作者邮箱:liangfulai@fmmu.edu.cn