基于S7-200高精度定量阀控制器的改进研究
2016-02-06黄宝柱胡祥满
汤 伟 黄宝柱,* 胡祥满 王 锋
(1.陕西科技大学工业自动化研究所,陕西西安,710021;2.浙江力诺流体控制科技股份有限公司,浙江瑞安,325200)
·定量阀控制·

基于S7-200高精度定量阀控制器的改进研究
汤 伟1黄宝柱1,*胡祥满1王 锋2
(1.陕西科技大学工业自动化研究所,陕西西安,710021;2.浙江力诺流体控制科技股份有限公司,浙江瑞安,325200)
分析定量阀结构和控制原理,将传统的恒频脉冲控制算法与梯形曲线算法、S形曲线算法进行了对比,选择用拟合S形曲线的算法控制定量阀。同时,为了有充足加减速过程,使用细分驱动技术,在不增加控制器硬件成本前提下,通过拟合7段S形曲线,最终实现了高精度定量阀的精密定位控制。
高精度定量阀;恒频脉冲控制算法;梯形曲线算法;S形曲线算法;细分驱动技术
工业生产中流体流量的控制好坏,对产品质量影响非常大,高精度定量阀就是应用于流体流量精密控制场合[1-2]。例如造纸过程中,纸张定量的稳定性是衡量产品质量的一个重要基准,而定量的决定性因素在于上网绝干浆料的多少,在浓度稳定的前提下,对于流量的调节就显得尤为重要。就高速卫生纸机而言,可以用变频上浆泵来稳定上浆的压力,用电磁流量计和高精度定量阀来控制流量[3-5]。
目前国内大多数高速卫生纸机定量调节都使用高精度定量阀,其优点在于调节精度高,能够很好地满足纸厂需求。由于国产定量阀不能够很好满足工业现场需求,这类能达到满意效果的定量阀几乎全是国外产品,而国外一个DN100定量阀价格为10万~15万元,高昂的设备成本让许多纸厂望而却步,因此研制国内自有品牌的高精度定量阀非常必要。而现今国内对于定量阀的研究还处于初级阶段,阀门在工作时定位还不准确[6]。本研究主要从定量阀的控制器着手,使用细分驱动技术,将原来由一个脉冲完成的步距角细分为成倍的脉冲完成,通过比较后,用拟合S形加减速曲线方法发射脉冲,完成准确定位。
1 定量阀结构及控制原理
1.1 定量阀结构及技术特点
高精度定量阀可分为控制单元、执行器、连接在执行器上的阀体。控制单元是专有硬件电路板,采用双出轴步进电机和精密行星减速器为电动执行机构,步进电机的一端插入精密行星减速器用作阀芯驱动,另一端插入手轮。减速器输出主轴上设有齿轮和机械限位开关,极限反馈就是通过输出主轴上的限位开关实现的。阀门回讯器的连接轴与传动轴平行布置,这样可以减小阀门纵向体积,通过齿轮传动指示并反馈阀位。阀体一般使用V型球阀。高精度定量阀的结构图如图1所示。
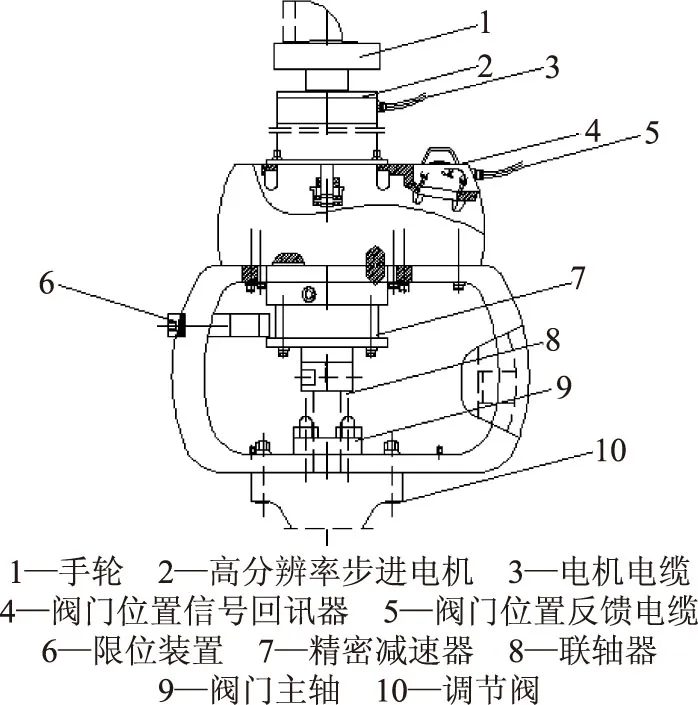
图1 高精度定量阀结构

图2 定量阀控制原理
使用步进电机作执行机构的原因在于步进电机不存在累计误差的优点,一个脉冲一个步距角,同时不受电压、电流等因素干扰。但步进电机在传统恒频脉冲工作时,起动会有丢步,低频振荡,还有起、停段冲击过大等现象。加上现有机械加工技术存在不足,导致阀门定位精度不高[7- 8]。
1.2 定量阀控制原理
控制单元接收给定的开、关阀信号,现场阀门极限反馈信号,4~20 mA阀位信号,阀门位置反馈是阀门内部一个精密电位计产生信号,该信号被转换成电流信号(4~20 mA),发送到控制单元。同时控制单元也会给QCS阀位反馈信号,脉冲信号由CPU上自带DO模块给步进电机驱动器,然后由步进电机驱动器给定驱动脉冲与电流。整个信号的输入输出需要1个AO、1个AI、8个DI、2个DO。定量阀控制原理图如图2所示。
2 定量阀传统控制策略
传统定量阀的控制信号一般分为两种模式,脉冲持续模式和电平持续模式,见图3。当QCS系统发射持续脉冲信号给控制单元,控制单元也同样给步进电机驱动器一个脉冲,这种脉冲跟作用时间长短与电机转角无关,控制单元只识别上升沿和下降沿。电机的动作与脉冲及方向信号有关,只有脉冲信号时,电机反转;脉冲加方向信号时,电机正转。当QCS给控制单元的是电平信号,步进电机驱动器同样发射恒频脉冲给电机,在开阀或者关阀电平接通时,电机正转或者反转,直至电平消失,电机停止。因此,对于传统的高精度定量阀控制策略来说,不管是恒频脉冲信号或者正反转电平信号,最终步进电机驱动器发射给电机的都始终是占空比为50%的恒频脉冲[9]。
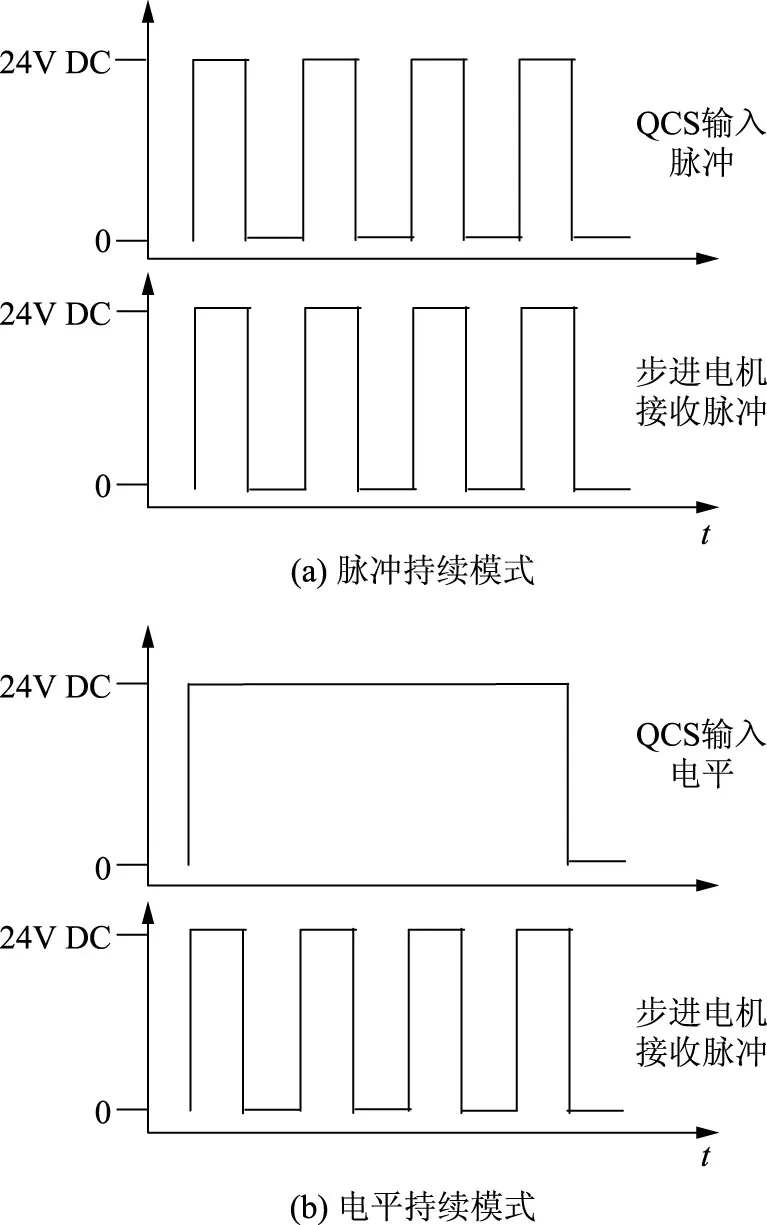
图3 传统定量阀控制信号模式
3 改进的定位控制策略
针对恒频率控制产生丢步、过冲、电机速度变化太剧烈等缺点,需要减少阀门定位过程中速度变化的梯度,而常见的定位速度控制曲线有梯形加减速曲线、S型加减速曲线[10],都能减少定位过程中的速度变化梯度,下面分析这两种控制算法曲线的特征。
3.1 梯形加减速曲线
如图4所示,梯形加减速曲线可以分为3段:恒加速运动、匀速运动、恒减速运动。初始速度反应步进电机的动力性能。
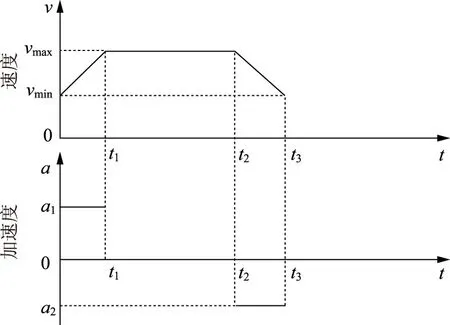
图4 梯形加减速曲线
由图4可以看出,梯形加减速曲线在速度变化上没有突变,在加速度的变化上存在2次突变,在速度的拐点处仍可能存在丢步的问题。
3.2 S形加减速曲线
S形加减速曲线有多种类型,7段的曲线是最复杂的,也是最完整的。分别是:加速度增大的加速运动、加速度恒定的加速运动、加速度减小的加速运动、加速度为零的匀速运动、 加速度增大的减速运动、加速度恒定的减速运动、加速度减小的减速运动。S形加减速曲线如图5所示。
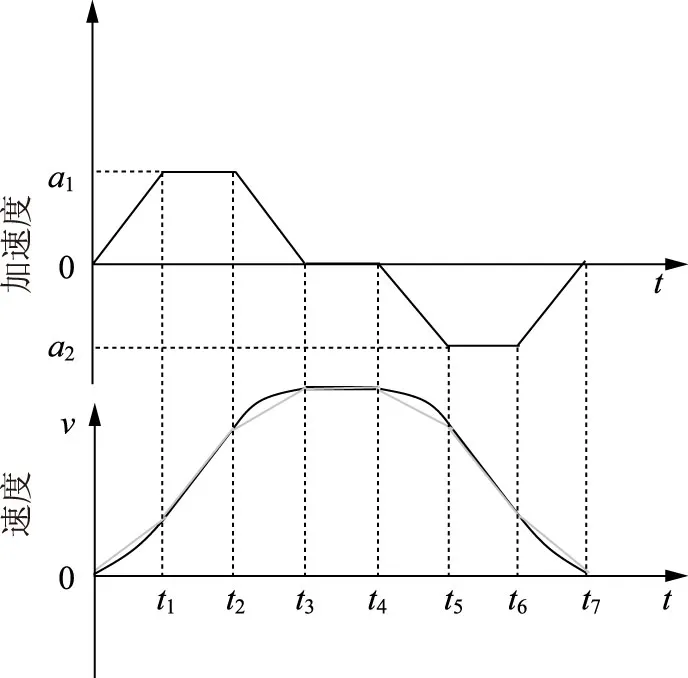
图5 S形加减速及拟合曲线
电机以初速度为0,加速度为:
在[0,t1]时间段内,做加速度增大的加速运动,t1时刻的速度:
(t1,t2]时间段内做加速度恒定的加速运动,t2时刻的速度:
(t2,t3]时间段内做加速度减小的加速运动,t3时刻的速度:
(t3,t4]时间段内,做加速度为零的匀速运动,t4时刻的速度:
v4=v3
(t4,t5]时间段内,做加速度增大的减速运动,t5时刻的速度:
(t5,t6]时间段内,做加速度恒定的加速运动,t6时刻的速度:
(t6,t7]时间段内,做加速度减小的减速运动,t7时刻速度:
S形曲线是比较好的运动曲线,整个运动过程中在速度以及加速度都没有发生突变,运动非常平稳。同时拟合曲线也分为7段,第一段加速度适中,加速度过大易丢步,做加速运动,到第二段加速度增大,减小速度上升时间,第三段加速度比前两段都小,防止过冲,第四段做匀速运动,剩下的减速段与加速段对称,结果发现拟合曲线能很好地贴合S形曲线。由此得出结论:两种曲线均能够减少定位过程速度变化梯度,能有效降低丢步和过冲出现的可能性,而且S形加减速曲线的定位精度是最好的,但是通过编程发现S形加减速曲线在PLC执行过程中耗时过长,脉冲发送耗时比程序运行周期段短,会造成电机停转现象。反而S形加减速拟合曲线在使电机速度连续的前提下,也能达到满意的效果。表1是各脉冲类型之间优缺点以及与S7-200兼容性的对比[11-12]。

表1 脉冲类型对比
因此采取细分驱动技术、S形加减速拟合曲线发射脉冲为控制策略,不增加控制器硬件成本情况下,可以实现高精度定量阀的精准定位。这是与传统的恒频脉冲控制不同之处,给步进电机一个加速、减速过程,在整个运动过程中没有速度上的突变[13-14]。
4 S形加减速7段拟合曲线精密定位控制的工程实现
4.1 高速脉冲串输出概述
PTO、PWM是S7-200 PLC高速脉冲串输出,在PTO的作用下,通过改变脉冲的周期值和脉冲数,可以实现变频脉冲,PWM是宽度可调脉冲信号,周期不可变。PTO分为单段PTO和多段PTO两种。
单段PTO:定义一个脉冲串,输出一个脉冲串,特殊参数通过特殊寄存器来定义。
多段PTO:集中定义多个脉冲串,按顺序输出多个脉冲串,特殊参数通过包络表定义。
4.2 PTO的实现
单段PTO的实现方法:用指定的特殊标志寄存器定义脉冲串特性参数,每次定义一个脉冲串。一个脉冲串输出后产生中断,在中断服务程序中再为下个脉冲串更新参数,输出下一个脉冲串。单段PTO的优点在于可以采用不同的时间基准,但是在输出多个高速脉冲串时,编程复杂,且参数设置不当会造成脉冲串之间的不平滑转换。
多段PTO的实现方法:集中定义需要的脉冲段数,并把各段脉冲的特性参数按照规定的格式写入用户指定的变量存储区,也就是包络表。包络表是包络段数和各段参数组成,定义包络的首地址为脉冲总段数,定义一段脉冲串需要8个字节,2个字节存放脉冲串的起始周期值,2个字节定义脉冲串的周期增量,其中周期增量等于段终止周期值减去段起始值再比上该段的脉冲数,最后4个字节存放该段的脉冲数。由于在实现多段高数脉冲输出时,多段PTO编程比单段PTO编程更易实现,选择用多段PTO来实现7段S形加减速拟合曲线。
4.3 多段PTO编程方法与步骤
首先初始化操作,将PTO的输出点Q0.0复位。调用初始化子程序SBR-1,设置控制字节SMB67,按照控制要求按位填写,如表2所示,将二进制转化十六进制,得到SMB67=16#A0。将包络表的起始地址400写入SMW168,填写包络各段脉冲串的特性参数,比如周期值、周期增量、脉冲数。建立中断连接,用ATCH指令建立脉冲输出完成中断事件和中断程序的联系。当PLS指令输出完指定数量的脉冲串时,产生中断。用ENI开放全局中断。
最后有起动信号时,执行高速脉冲输出指令PLS,按顺序输出多段脉冲串,有停止信号时,SM67.7会复位,禁止脉冲输出。

表2 SMB67二进制位
4.4 程序与试验结果
主程序流程图如图6所示。
主程序代码如下: LD M0.1
R Q0.0, 1
CALL SBR_1:SBR1 //将输出映像寄存器Q0.0清零;初始化子程序SBR_1。

表3 阀门电机实验数据
LD M0.0
MOVB 16#A0,SMB67
MOVW 400,SMW168
CALL SBR_0:SBR0
ATCH INT_0:INT0,19
ENI
PLS 0 //装载时间基准16#A0,并赋包络表首地址400,调用子程序SBR0,建立中断与中断服务程序联系,全局开放中断,执行脉冲输出指令。
LD M0.0
EU
R M0.0,1 //复位使能开关
LD M0.2
R SM67.7, 1
PLS 0
S SM67.7, 1
R M0.2, 1 //禁止脉冲串输出,并复位停止按钮。
步进电机一个脉冲1.8°,恒频脉冲多次实验发现存在丢步和过冲现象。通过256细分,拟合S形加减速整个过程,用分辨率为0.045°旋转编码器测量步进电机转角,结果如表3所示,误差明显减小。
脉冲波形通过示波器显示,如图7所示,脉冲频率是个逐渐增加到稳定再逐渐减小的过程,与实际加减速过程吻合。

图6 主程序流程图

图7 拟合曲线脉冲波形
5 结 语
高精度定量阀作为流体流量精准控制不可或缺的设备,其定位准确与否直接影响产品质量。为满足生产需求,很多工厂只好购买国外定量阀,大大增加了设备投入成本。目前国内研制的定量阀由于机械加工精度以及步进电机丢步、过冲等原因,致使定量阀定位不准确。选择使用S形加减速拟合曲线控制算法,在不增加硬件成本的前提下,有效地提高了阀门的定位能力。
[1] WANG Bo, TANG Wei, DONG Ji-xian, et al. Design of Cross Direction Basis Weight Control Actuator of Dilution Water Hydraulic Headbox[J]. China Pulp & Paper, 2015, 34(5): 41. 王 博, 汤 伟, 董继先, 等. 稀释水水力式流浆箱横幅定量控制执行器设计[J]. 中国造纸, 2015, 34(5): 41.
[2] TANG Wei, SHI Song-jiao, WANG Meng-xiao. Auto-tuning PID/PI Control and Its Application to Paper Basis Weight Control[J]. China Pulp & Paper, 2002, 21(2): 34. 汤 伟, 施颂椒, 王孟效. 一种自整定PID/PI及其在纸张定量控制中的应用[J]. 中国造纸, 2002, 21(2): 34.
[3] SUN Kongzheng, XU Shuyan, CAO Xiaotao, et al. Speed Control of Step Motor Based on Torque Curve[J]. Micromotors, 2014, 47(1): 81. 孙孔政, 徐抒岩, 曹小涛, 等. 基于矩频曲线的步进电机加减速控制[J]. 微电机, 2014, 47(1): 81.
[4] WANG Bo, TANG Wei, LIU Qing-li, et al. Research and Development of Medium High-precision Quantitative Valve for Basis Weight Control of Paper Machine[J]. China Pulp & Paper, 2014, 33(3): 39. 王 博, 汤 伟, 刘庆立, 等. 国产造纸机用中高精度定量阀的研制[J]. 中国造纸, 2014, 33(3): 39.
[5] WANG Bo, TANG Wei, LIU Qing-li, et al. Research and Development of Domestic Basis Weight Valve Controller of Paper Machine[J]. Paper Science & Technology, 2014, 33(2): 77. 王 博, 汤 伟, 刘庆立, 等. 造纸机用国产定量阀控制器的研制[J]. 造纸科学与技术, 2014, 33(2): 77.
[6] ZENG Kangling, YANG Xiangyu, ZHAO Shiwei, et al. Optimization of Exponential Acceleration Curve of Stepper Motor and Realization on PIC[J]. Micromotors, 2014, 47(6): 36. 曾康玲, 杨向宇, 赵世伟, 等. 步进电机指数型加速曲线优化与实现[J]. 微电机, 2014, 47(6): 36.
[7] WANG Bo, TANG Wei, LIU Qing-li, et al. Optimal Design of Medium High-precision Quantitative Valve for Basis Weight Control of Paper Machine[J]. Fluid Machinery, 2014, 42(8): 52. 王 博, 汤 伟, 刘庆立, 等. 中高精度定量阀的优化设计[J]. 流体机械, 2014, 42(8): 52.
[8] Zheng Zhong. Control Strategy and System Construction for Two Phase Stepper Motor[J]. Ordnance Industry Automation, 2011, 30(6): 65. 郑 重. 两相步进电机控制策略及系统构建[J]. 兵工自动化, 2011, 30(6): 65.
[9] YANG chao, ZHANG Dong-quan. Stepper motor’s acceleration and speed control based on S-curve[J]. Mechanical & Electrical Engineering Magazine, 2011, 28(7): 813. 杨 超, 张冬泉. 基于S曲线的步进电机加减速的控制[J]. 机电工程, 2011, 28(7): 813.
[10] CUI Jie, YANG Kai, XIAO Yajing, et al. Algorithm Research in Acceleration and Deceleration of Stepper Motor[J]. Equipment for Electronic Products Manufacturing, 2013, 33(8): 45. 崔 洁, 杨 凯, 肖雅静, 等. 步进电机加减速曲线的算法研究[J]. 电子工业专用设备, 2013, 33(8): 45.
[11] WANG Bo, TANG Wei, DONG Ji-xian, et al. Research and Development of Domestic Dilution Water Headbox’s Dilution Control Actuator[J]. Paper and Paper Making, 2015, 34(1): 8. 王 博, 汤 伟, 董继先, 等. 国产稀释水水力式流浆箱稀释水阀执行器的设计[J]. 纸和造纸, 2015, 34(1): 8.
[12] WANG Bo, TANG Wei, DONG Ji-xian, et al. Research and Development of Domestic Dilution Water Headbox’s Dilution Valve Controller[J]. Fluid Machinery, 2015, 43(4): 48. 王 博, 汤 伟, 董继先, 等. 国产稀释水阀控制器设计[J]. 流体机械, 2015, 43(4): 48.
[13] PAN Jian, LIU Mengwei, Overview on Control Strategies of Stepping Motor[J]. Modern Electronics Technique, 2009(15): 143. 潘 健, 刘梦薇. 步进电机控制策略研究[J]. 现代电子技术, 2009(15): 143.
[14] LIU Yadong, LI Congxin, WANG Xiaoxin. Precise Control of Step Motor Speed[J].Journal of Shanghai Jiaotong University, 2001, 35(10): 1517. 刘亚东, 李从心, 王小新. 步进电机速度的精确控制[J]. 上海交通大学学报, 2001, 35(10): 1517. CPP
(责任编辑:刘振华)
Improvement of High-precision Quantitative Valve Controller Based on S7-200
TANG Wei1HUANG Bao-zhu1,*HU Xiang-man1WANG Feng2
(1.InstituteofAutomation,ShaanxiUniversityofScienceandTechnology,Xi’an,ShaanxiProvince, 710021; 2.ZhejiangLinuoFluidControlTechnologyCo.,Ltd.,Rui’an,ZhejiangProvince, 325200)(*E-mail: 760596306@qq.com )
This paper analyzed the structure and control principle of quantitative valve. After comparing the traditional constant frequency pulse control algorithm, with the trapezoidal curve algorithm, and S curve algorithm, fitting S curve algorithm was close to control the quantitative valve. At the same time, in order to have enough acceleration and deceleration process, the subdivided driving technology was applied, by fitting 7 segments S curve and without increasing hardware cost was realiged, the precision positioning control of high-precision quantitative valve was realized.
high-precision quantitative valve; constant frequency pulse control algorithm; trapezoidal curve algorithm; S curve algorithm; subdivided driving technology
2016- 06-14(修改稿)
高精度定量控制执行器的研制(201311);陕西省重点科技创新团队计划项目(2014KCT-15)。
汤 伟先生,博士,教授;研究方向:工业智能控制及工业高级过程控制。
TS737+.3;TP212
A
10.11980/j.issn.0254- 508X.2016.12.009
*通信作者:黄宝柱先生,E-mail:760596306@qq.com。