GNSS定位技术在水下测绘中的应用
2016-02-05李晓晨刘文国董温荣
李晓晨,刘文国,董温荣
(山东省水利勘测设计院,山东济南 250014)
GNSS定位技术在水下测绘中的应用
李晓晨,刘文国,董温荣
(山东省水利勘测设计院,山东济南 250014)
随着GNSS测绘技术的发展,水下测绘的成熟模式为载波相位动态实时差分技术与测深仪组合。本文阐述了这种模式在水下测绘的应用及工作原理,提出了工作过程中的一些经验和体会。
GNSS;RTK;水下测绘;测深仪
潍坊北部沿海地区濒临渤海莱州湾,资源丰富。风暴潮是潍坊市北部沿海成灾最大的自然灾害,使沿海地区渔业、盐化等生产遭受严重经济损失。沿海防护堤工程的建设以防御沿海风暴潮灾害为主要目的,具备防潮、防浪及防沙的功能,兼具汛期行洪排涝、控制海域污染、生态环境恢复等功能,是保证潍坊市“三北”地区开发和滨海新城建设的重要屏障。人工岛及海河路工程位于沿海防护堤以南,主要工程内容包括潍坊白浪河防潮闸以南、龙震大坝以北的白浪河河道清淤疏浚,吹填规划人工岛及东堤坝(规划海河路)、建设沿线桥闸工程等。该项目位于潍坊市滨海经济开发区境内,测量目的是为潍坊滨海旅游度假区人工岛及海河路工程初步设计提供必要的基础测绘成果。测区80%的面积为水下。采用RTK定位技术配合测深仪进行水下测绘,可大大提高工作效率。
1 测区控制网建立
经现场查勘,测区附近现有山东省建立的全球导航卫星系统连续运行参考网站站点,坐标系统为1980西安坐标系,可以作为本次测量联测点和起算点使用。并进行大地水准面精化,获得大地正常高系统高程,高程系采用1985国家高程基准。中央经线为东经119°10′。本次首级GPS卫星定位测量采用2台Leica SR530(Rush)型双频GNSS卫星接收机和3台中海达V8GNSS-R4联合施测。作业方式采用同步静态观测。为求定GNSS点在某一参考坐标系中坐标,对附近山东省连续运行参考站网点进行联测,联测的总点数为4点。采取整体布网,整体数据处理的方式。利用LGO平差软件对静态测量原始数据进行平差,将CORS求得的数据作为起算数据,求得中央经线为120°的6°带坐标成果。最弱点点位中误差为±0.14 cm;换带求得中央经线为119°10′的1980西安坐标系平面坐标成果并求得坐标系统间的转换参数。
根据《全球定位系统(GPS)测量规范》要求,GPS控制网测量采用中误差作为精度的技术指标,以2倍中误差作为极限误差,且满足D级精度要求。表1为大地水准面精化成果:
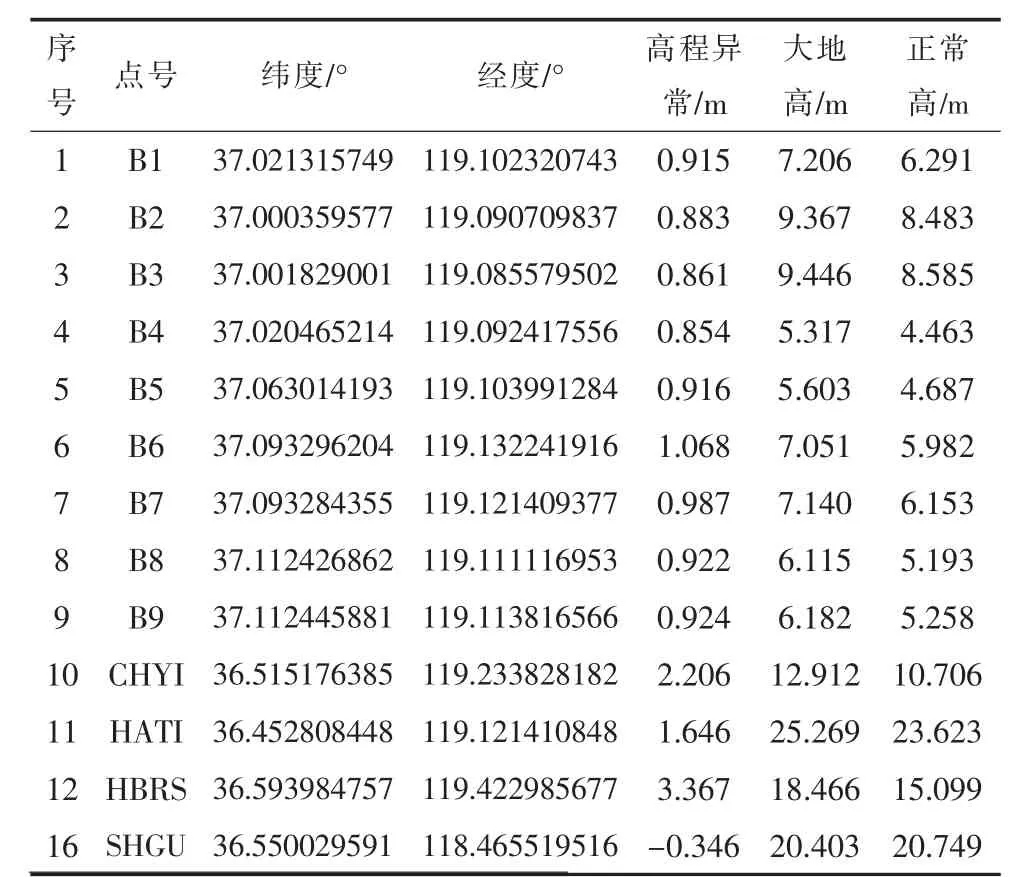
表1 大地水准面精化成果表
2 控制网的各项技术指标及精度统计
基线解算是利用网中观测时间较长的测站单点定位,获得WGS-84坐标;以此为起算点,采用双差固定解模式,分别解算其他各点。然后对解算的基线向量进行预处理,统计同步环闭合差、复测基线较差和异步环闭合差。在WGS-84坐标系中进行三维无约束平差,剔除含粗差基线,检查内符合精度,计算基线向量改正数,统计基线的绝对误差和相对误差,计算各点三维坐标、大地经纬度坐标和平面坐标,统计点位中误差。利用三维无约束平差后的数据,在1980西安坐标系中进行二维约束平差,计算各点二维坐标,统计点位中误差、距离中误差、距离相对中误差。

表2 复测基线长度较差统计
3 水下地形测量
水下地形测量的作业系统主要由GNSS接收机、数字化测深仪、数据通信链和便携式计算机及相关软件等组成。测量作业分3步来进行,即测前的准备、外业的数据采集测量作业和数据的后处理形成成果输出。使用Leica SR530(Rush)型双频GNSS卫星接收机及南方HD-27型数字回声测深仪进行水深测量。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不到1 s。基准站和移动站必须要保持4颗以上相同卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果;所以有时偶尔RTK没有固定解也是很正常的。
外业操作方法:1)水下地形测量基本在无风的天气进行,采用断面法施测,先在已有陆地地形图的基础上,预先按技术要求做好断面计划线,计划线根据海面情况布置成与航道方向大致成垂直的方向。断面间距为100 m。2)将GNSS RTK仪器安装在测深仪探头上,船上GNSS RTK仪器与测深仪平面位置一致,并保证测深仪垂直于水面。3)水下地形采集密度以能显示出水下地形特征为原则。水下地形点点距为图上2~5 cm,实际距离为40~100 m。水下地形变化复杂区域测深仪采集点距适当缩短以反映地形特征,满足水下地形等高线的勾绘。对于浅水或船不能到达的区域采取测量人员穿下水裤涉水测量。4)水下地形测量沿作业边界往外扩测100 m,以满足要求。
水深测量期间进行测深检查线测量,检查线贯穿整个测区,用以检查不同日期、不同时间、不同潮时所测断面测深值的正确性,从而保证水深测量成果质量。测深检查线垂直于主测深线方向布设,其总长度大于主测深线的5%;对检查线与水深测量断面的水深重合点进行数据统计,具体结果见表3。

表3 测深精度统计表
由表2所列数据计算出测深误差为±0.07 m,符合规范要求。
4 结语
在采用了GNSS实时定位技术后,测深仪换能器可以实时获得高精度的三维坐标,再配姿态纠正仪,使得水下高程及时高效的获取。对于大面积水域和海域构建水下地形地貌和DEM获取是一种极为实用、稳健和经济的方式。相信随着GNSS技术、激光扫描技术和无人机技术的发展,水下测绘技术能有更好的进步。
[1]高成发,赵毅.差分GPS水深测量系统在港口工程中的应用[J].测绘工程,2004.
[2]孔祥元,梅是义.控制测量学(第二版)[M].武汉大学出版社,1996.
[3]徐绍铨,等.GPS测量原理及应用[M].武汉大学出版社,2004.
(责任编辑 张玉燕)
P228
B
1009-6159(2016)-12-0008-02
2016-05-17
李晓晨(1979—),男,工程师
