机载火控雷达和电子战一体化问题研究
2016-02-05战立晓李蕾义汤子跃张袁鹏
战立晓,李蕾义,汤子跃,张袁鹏
(1.中国人民解放军94362部队,山东 青岛 266111;2.空军预警学院,湖北 武汉 430019)
机载火控雷达和电子战一体化问题研究
战立晓1,李蕾义1,汤子跃2,张袁鹏2
(1.中国人民解放军94362部队,山东 青岛 266111;2.空军预警学院,湖北 武汉 430019)
现在的战斗机都装载有火控雷达(FCR)、电子战系统(EWS)和无线数据链等。这些系统都是独立工作的,且相互之间很少有信息交换。为有效提高系统的综合性能,提出了各系统之间的四级融合机制:初级融合、原始数据级融合、分系统级融合、组网级融合。其中前三级融合均基于单个多功能传感器,最后一级融合基于多功能传感器组网。四级融合机制大大提高了雷达和电子战系统的效率,显著提升了系统的整体性能。
战斗机;火控雷达;电子战;协作;融合
0 引言
现代战斗机一般都装载有火控雷达(FCR)和电子战(EW)等设备,通常机载火控雷达主要是用来探测和跟踪对方目标,为发射导弹等攻击型武器提供目标的位置数据及其它参数;而EW的目的是为了保护自己,它要全方位全频段探测对本机有威胁的目标,及时向驾驶员发出告警,并进行电子干扰,破坏对方对己方战机的探测、跟踪和攻击,所以电子战要对海、陆、空各种可能的威胁进行分析判断,其告警和干扰不仅针对对方的雷达还要针对导弹等[1-6]。本文讨论的机载平台主要指有人战斗机,在将来同样可以扩展到无人机平台上。
1 主要系统简介
1.1 火控雷达
为了对远距离目标进行探测,且进一步的对空中和地面目标进行分类,机载FCR通常工作在有源模式。对雷达反射回波进行信号处理,可进一步地提高目标的分辨率和定位(距离、方向和速度)能力,从而使其在多目标条件下也有良好的性能。但其缺点是发射的信号容易被对方电子支援措施(ESM)检测到。
目前,在对抗电子战系统(EWS)方面,有一种思路是利用具有低截获概率的离散波形来实现,但关键问题是如何在保持较高雷达探测距离的前提下降低截获概率。由于EWS接收机和处理机技术的进步(窄带数字多通道接收机和有效的脉冲解耦和算法),这个问题更加难以解决。
新型FCR装备了有源电子扫描天线(AESA),一般工作在X波段,其带宽远大于传统的雷达带宽,且AESA的角覆盖范围在方位和俯仰上都限制在±60°。通常FCR的发射功率较高(等效全向辐射功率EIRP大于60dBWi),具有很窄的笔状波束(一般只有几度),且天线增益通常大于30dBi(具体取决于天线尺寸)。由于AESA的灵活性,发射和接收可以形成不同的辐射方向图(利用T/R模块的相位和增益进行发射,利用自适应或非自适应DBF进行接收)。
1.2 电子战系统
与FCR不同,EWS中的ESM是一种无源隐蔽的传感器。它通过接收和处理来自雷达的电磁波,提供对目标的探测和精确的角定位,进而识别出目标上的雷达。
对于运动目标,如未知航迹的空中目标,目标距离由接收信号测得,与雷达波束导向等因素相关。但这种距离测量的相对精度只有十分之一。而对于静止目标,如地面固定目标,距离测量的精度明显提高。
因为ESM无法同雷达一样利用接收信号的先验信息,所以ESM接收机的灵敏度远远低于雷达。而且,在复杂的电磁环境中,ESM必须区分来自多个雷达的发射信号。接收机灵敏度越高,来自多个雷达的不同脉冲的分离越困难。尽管灵敏度较低,但是ESM的探测距离通常比FCR的大,这主要是因为ESM的传播因子是R-2(单程),而雷达的传播因子是R-4(双程)。
2 火控雷达和电子战系统的协作
最初,FCR和EWS之间是要避免相互干扰的,因此需要通过时间共享来管理规划雷达发射、雷达告警监视和雷达ECM。
随着技术的发展,FCR和EW的功能都在不断扩展,而且相互渗透,这就需要统一的管理和数据融合,使FCR和EW及其它传感器协同工作,充分发挥各自的效力又不发生冲突,既能保存自己又能有效的攻击对方。基于此,本文提出了FCR和EWS的四级融合机制,如图1所示。
1)初级融合:基于FCR和EWS的数据融合的协作方法,该方法比单独使用其中的一个系统性能要好得多。
2)原始数据级融合:在初级融合的基础上,利用FCR和EWS的原始数据进行信息共享,进而增强系统性能。
3)分系统级融合:如天线分系统、发射机分系统、接收机分系统和处理机分系统。通过共享这些分系统来完成FCR和EWS的功能,其中发射机分系统均使用低相位噪声发射机,接收机分系统使用高动态范围接收机、多波段接收机等。
4)组网级融合:利用具有FCR和EWS双重功能的传感器,实现集约而智能的传感器配置组网,在FCR和EWS两个系统之间实现资源共享。
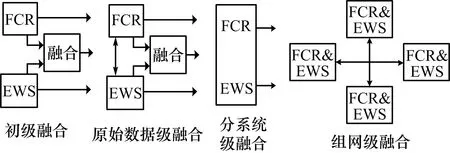
图1 四级融合机制示意图
2.1 FCR和EWS之间的时频共享问题
FCR和EWS之间协同工作的主要问题是射频耦合问题,主要包括:战斗机上FCR和EWS天线之间的耦合;地面杂波的耦合和大雨导致的水汽现象。因此,四级融合机制涉及到时间或频率共享问题。
2.1.1 战斗机上天线之间的耦合
这种耦合发生在FCR天线和EWS天线的旁瓣。假设所有天线的旁瓣电平接近0dBi,耦合量可以通过g=λ/4πd2估计,其中d是天线之间的距离。
在X波段,当天线之间的距离d=5m时,耦合量大约为-70dB。FCR的AESA辐射功率大约为60~70dBm(取决于T/R组件的数量),ESM接收的虚假信号的幅度大约在0dBm,因此在FCR脉冲发射期间,没有任何RF前期滤波,这种信号导致ESM无法正常工作。
2.1.2 杂波的耦合
地面或空中颗粒反射雷达信号,导致发生杂波的耦合。耦合量的大小取决于战斗机的高度、FCR天线的倾斜度、地形情况等因素。耦合的发生可能致使ESM工作异常。
以上问题需要FCR和ESM功能之间进行时间或频率共享来保证这两个系统的高效可靠工作。
2.2 初级融合
下面通过空中非协作目标识别问题来说明雷达和ESM系统初级融合的思想。
2.2.1 雷达非协作目标识别
非协作目标识别方法主要依靠战斗机的发动机特点,通过提取可识别的喷气发动机调制(JEM)特征对目标进行识别。但该方法的缺点是存在模糊识别问题,比如有多架战斗机安装了相同发动机的情况。解决的方法是增加一维距离像(RP)分析。通过这种方法可以在一定程度上降低模糊度。
2.2.2 ESM非协作目标识别
ESM可利用雷达发射的波形来识别目标所在的平台,但因为一种雷达可以安装在不同的战斗机上,所以该方法识别平台也是有模糊度的。
2.2.3 雷达和ESM的初级融合
雷达和ESM系统的非协作目标识别的目标是以最小的模糊度识别出平台。因此系统非协作目标识别的主要步骤为:1)由火控雷达根据JEM特征判断出对方战机发动机的类型;2)火控雷达对对方战机进行一维距离向成像,并对一维距离像进行匹配分析;3)由ESM判断出战斗机所装载的雷达型号,进而综合对非协作目标识别进行识别。
FCR和ESM的初级融合需要两个系统的通力协作,且需要两个系统之间的时间或频率共享。
2.3 原始数据级融合
下面通过空对空作战和空对地作战两个例子来说明原始数据级融合的思想。
2.3.1 空对空作战中的原始数据级融合
对于空对空作战任务,机载雷达装载在战斗机上。利用FCR和ESM两种传感器对目标进行联合检测和分辨。
只有当远距离发射信号的雷达的主瓣照射到ESM,ESM才能对其进行探测和识别。在多目标情况下,利用角联合定位的主要问题是对平台数量难以确定,尤其当多个平台安装同一型雷达的情况。如果雷达处于静默状态则ESM无法检测到。
而FCR是一种有效的多目标传感器(利用距离、多普勒和天线的角选择性进行分辨),但探测距离比ESM近。因此,如果探测搜索的角域Ω减小,FCR的探测距离将提高。(雷达探测距离R正比于Ω-1/4)。
所以可以由ESM提供给火控雷达原始的探测方向。FCR只在一个很小的区域内进行探测,性能大大提高。同样,雷达可以给EWS提供探测目标的数量及其相关参数(距离、角度和速度),从而大大降低目标识别的模糊度,提高目标识别的概率。
2.3.2 空对地作战中的原始数据级融合
空对地作战任务有很多种,比如对对方空防的压制。
1)首先,ESM提供给雷达关于地面对方雷达的粗定位,ESM定位的不确定性是一个椭圆。
2)其次,FCR以该粗定位为中心,对所需区域进行SAR成像。SAR图像的尺寸与EWS的位置精确地匹配。
3)然后,通过对SAR图像进行必要的图像处理,根据SAR图像的特征,火控雷达对对方目标进行探测。
4)最后,在FCR的测量坐标系中,对目标进行精确定位。
无论空对空作战还是空对地作战,ESM和FCR系统都是相继工作的,它们之间不涉及时间或频率共享问题。
2.4 分系统级融合
分系统级融合包括资源的共享和模块的共享两部分。
2.4.1 资源的共享
以X波段下ESM灵敏度的提高问题进行说明。现在,ESM的灵敏度普遍较低,只有当雷达的主瓣照射到ESM后,才能被探测到。解决办法是通过把ESM接收系统连接到火控雷达的高增益AESA上来提高系统性能。这样,ESM的灵敏度大大增强,但仅仅局限在雷达AESA的主瓣内。
该升级不影响雷达在主瓣和副瓣内的连续探测,而且可以大大提高ESM的灵敏度。现在急需发展一种新的天线扫描策略,扩展到频域和空域中的扫描和处理,经典的只利用主瓣和固定频率的模式已不能满足要求。
但是这种升级仅仅适用于X波段雷达,与AESA具有相同的极化。因为ESM系统利用了FCR天线,FCR和ESM之间不涉及时间和频率的共享问题。
2.4.2 模块的共享
EWS和FCR之间可以共用以下几个分系统模块:1)高增益、宽带X波段有源阵列带有多个子阵;2)低/中增益宽带天线;3)可调的RF滤波器、RF和IF转换器;4)下变频和上变频;5)多模式数字IF接收机;6)频率合成、宽/窄带波形产生器;7)电源。
这样既可以减少无用元件的重复,降低费用,又能使其集约化。但要保证同时多功能(雷达探测、ESM和ECM),而且要确保整个系统的可靠性。
2.5 组网级融合
人们希望雷达不仅能够从飞机尾部发现目标,而且可以从飞机侧身方向发现目标,同样希望EWS能利用高增益和宽带AESA。现在,诸如宽带AESA和相关的RF技术已经成熟,因此这种雷达和电子战能力也可以实现。
雷达和电子战系统都可以应用宽带和双极化AESA,如以下两个典型的机上单平台的例子所示。
2.5.1 无人机上的组网战斗电子系统(NCES)
NCES是一个基于无人机平台的多功能传感器组网的例子。
该组网系统包括无人机平台、分布式宽带AESA、相关的前后RF分系统等,实现该无人机平台上的所有的RF功能,如1)360°范围内可精确测角的ESM功能;2)雷达功能(空对空模式和空对地模式);3)干扰功能。
该组网系统可以实现以下功能:1)多-多功能AESA系统的管理(监督、次序、优先级管理)。如 360°范围内无源监视需要所有边天线之间的配合,而空对空雷达跟踪模式等其它功能可以仅用一个天线工作,与其它天线无关。2)基于FPGA组件重新配置中间设备(如数字接收机,波形产生器,高速数字处理机);3)所有的处理(信号处理、数据处理);4)与平台的人机交互界面。
2.5.2 战斗机规避机动阻止火力目标的反击
载有有源天线的导弹远距离发射时,在导引弹头锁定目标并自动跟踪前,需要一个初始的导航,这个初始的导航由FCR跟踪提供。
导弹发射后,可通过实施规避机动来避免对方目标的反击。对方战机目标被跟踪并且锁定导弹头以后才能实施规避机动,即对方战机目标必须在FCR的视场内。一般战斗机上的火控雷达的视场限制在鼻锥前±60°,这导致了己方战机仍然可以被对方战机FCR检测到,如图2所示。
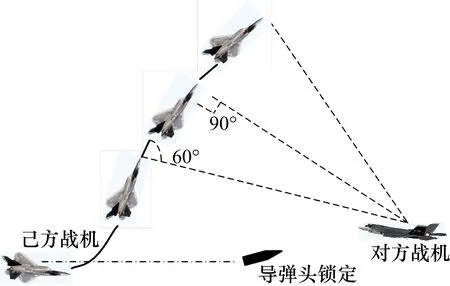
图2 战斗机规避机动阻止火力目标的反击示意图
如果己方战机位于对方战机方位角90°方向,那么己方战机的多普勒为零,位于多普勒凹口上,此时可以避免被对方战机检测到。所以可以通过升级,在对方战机被消灭之前,使方位角一直保持在90°方向。
这种升级要求:1)雷达跟踪达到至少90°,例如可以利用多功能侧视阵列天线。2)无论对方战机如何机动,通过精确导航始终保持己方战机处于对方战机FCR的多普勒凹口内。由于使用相同的多功能宽带侧视阵列天线,该任务可以通过ESM对对方FCR的测量来实施。
不同前面的例子,因为大多数FCR工作在X波段,所以FCR和ESM系统之间的兼容性问题非常重要。
2.5.3 多协作平台上的双重功能传感器
利用波达时间差分技术(DTOA)的无源目标定位是一个双重功能传感器有效实施的多平台的例子。
单战斗机平台上的ESM系统不能精确测距,实际上的距离由接收功率来估算,因此误差比较大。
为了获得运动目标的精确的瞬时距离,可以利用需要至少三个协作平台的DTOA技术,如图3所示。所测对方战斗机的火控雷达发射的脉冲信号,需有统一时钟进行记录标记,如用GPS信号进行标记。
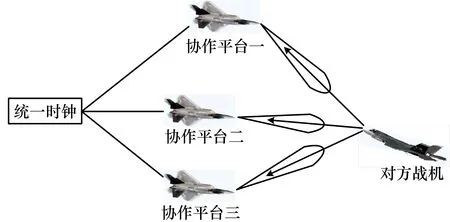
图3 三协作平台DTOA技术示意图
所要明确的一个问题是接收到的脉冲信号是否来自同一个雷达的同一组发射脉冲,这就需要有良好的灵敏度和分辨性能。ESM通过利用高增益窄波束天线可以达到这种要求,如战斗机鼻锥方向上火控雷达的AESA。
三个平台之间的协作需要数据链进行通信,数据链也可以用侧视多功能宽带阵列天线实现。
3 结束语
本文讨论了战斗机上火控雷达和电子战系统一体化问题。通过火控雷达和电子战系统之间的相互协作,大大提高了战斗机上雷达和电子战系统的效率。按照协作程度的递进,依次讨论了四种融合机制:初级融合、原始数据级融合、分系统级融合、组网级融合。特别是组网级融合中,火控雷达和电子战协作可以扩展到多协作平台。更进一步地,火控雷达和电子战系统之间的相互协作也可以扩展到其它RF功能以及通信领域。■参考文献:
[1] 周颖, 王雪松, 徐振海. 雷达电子战效果及效能评估的一般性思考[J]. 系统工程与电子技术, 2004, 26(5): 617-620.
[2] Adamy DL. EW: a second course in electronic warfare[M]. MA: Artech House, 2004.
[3] 邹顺, 邵竹生, 靳学明. 机载雷达电子战一体化研究[J]. 航天电子对抗, 2009, 25(3): 25-28.
[4] 张成伟, 高扬. 直升机载雷达电子战系统面临的作战环境及发展趋势[J]. 电子信息对抗技术, 2010, 25(3): 35-38.
[5] 赵锋, 王雪松, 肖顺平. 雷达电子战系统分布式仿真时间管理研究[J]. 计算机仿真, 2007, 24(1): 127-130.
[6] 蒙洁, 汪连栋, 王国良. 雷达电子战系统电磁环境仿真[J]. 计算机仿真, 2004, 21(12): 21-24.
高性能的美国无人水下潜航器
2016年12月15日,中国海军在南海发现一套不明装置,为防止其对过往船舶航行安全和人员安全产生危害,本着负责任和专业的态度将其捕获并进行识别查证,该装置为美国无人水下潜航器(UUV)。2016年12月20日,中美双方在南海有关海域顺利完成UUV的移交工作。
这已不是国外UUV第一次出现在中国南海。有关人士指出,号称"海底杀手"的UUV具有能浅能深、可远可近、攻防兼备、亦单亦群和可主可辅的特点,其作战功能多样化,不仅可以是有人作战平台的辅助手段,亦可独立成军,很可能成为颠覆未来海战模式的重要因素。因此,世界各军事强国高度重视UUV的研发,美军处于世界领先地位致力于高性能UUV技术的研究,其发展方向主要体现在以下几个方面:1)智能化程度更高;2)导航更精确;3)航程更远;4)下潜更深;5)航行时间更长;6)隐蔽性更高。
Study on the integration of airborne fire control radar and electronic warfare
Zhan Lixiao1, Li Leiyi1, Tang Ziyue2, Zhang Yuanpeng2
(1.Unit 94362 of PLA,Qingdao 266111,Shandong,China;2.Airforce Early Warning Academy,Wuhan 430019,Hubei,China)
Nowadays,fighters are fitted with Fire Control Radar (FCR), Electronic Warfare Systems (EWS), and some radio links. Each of these systems is dedicated to a particular task and cooperation is reduced to a minimal exchange of information between them. Major system performance enhancements are to be expected from close cooperation to other sensors. The future cooperations can be ordered in four stages: junior fusion, primary data fusion, subsystem fusion, and networked fusion. The first three stages lead to a multi-function sensor. The last is the deployment of compact multi-function sensors on a network basis. The four stages greatly improve the efficiency and the performance of the system.
fighter; fire control radar (FCR);electronic warfare (EW);cooperation;fusion
2016-09-13;2016-11-05修回。
战立晓(1986-),男,博士,主要研究方向为雷达成像与电子对抗技术。
TN97
A