HXD3C型电力机车牵引电机转速传感器故障对主功率单元的影响
2016-02-02刘应军廖永衡
刘应军,廖永衡
(1 广州铁路(集团)公司机务处,广东广州510088;2 广州铁路(集团)公司广州机务段,广东广州510031)
运用与维修
HXD3C型电力机车牵引电机转速传感器故障对主功率单元的影响
刘应军1,廖永衡2
(1 广州铁路(集团)公司机务处,广东广州510088;2 广州铁路(集团)公司广州机务段,广东广州510031)
介绍了HXD3C型机车的特点及其在广州机务段的使用情况,对其C4修后的线上运行过程中频繁出现的与转速信号异常有关的CI惯性故障进行了归纳,针对此类故障,分析了HXD3C型机车牵引传动系统尤其是传动控制级——CI变流器控制原理和控制目标,并推导了异步牵引电机的矩速自然特性和闭环控制特性,基于对异步牵引电机转速、转差频率与定子同步速在转子磁场定向中的互相关性分析,定性剖析了转速信号在转子磁场位置估算中的作用,指出转速信号中断导致转子磁场定向失误,生成错误定子参考电压矢量是造成此类CI惯性故障的主要原因,并提出了一系列改进措施,提高转速信号的稳定性。
HXD3C型电力机车;CI惯性故障;矩速特性;转子磁场定向;定子参考电压矢量
广州机务段作为华南地区最大的客运机务段,主要担当南京广线和西沪昆线部分管内直通旅客列车的牵引任务,南京广线运行密度大临时机外多,西沪昆线纵断面复杂、两者又有曲线半径小、地质灾害多,线路整治临时限速多等不利因素,以往采用SS8型电力机车难以保证列车正点率,因此广州机务段2011年初配属HXD3C型客运机车,担当客三速度标尺的旅客列车牵引任务,与SS8型机车相比,HXD3C型机车牵引性能优势明显,如图1所示。

图1 HXD3C与SS8机车牵引1 100 t25G客车平道加速至120 km/h性能比较
起动阶段单轴牵引力大,相同牵引定数时,加速度快,平道牵引1 100 t 25G客车至客三标尺限速,仅需运行2个区间约120 s;而SS8机车需要4~5个区间约5 min;调速阶段持续速度低,仅为65 km/h,在80~90 km/h限速的小半径曲线区段,机车仍能充分利用设计功率;按最高速运行时,仍旧具备较大的剩余加速度,此外交流传动机车网侧功率因数高、入段整备时间短、修程作业机车检修量小、发生故障具备自我诊断与数据存储、可靠性更高即使切除一架动力仍可正常运用,尤其适合长交路运行,深受机务整备、检修、运用乘务员和机调员的欢迎。
然而自2015年初以来,广州机务段所配属HXD3C型机车经过两年的运用,已开始陆续进入2年检(C4)甚至C5修程,以往承担总体检修任务以及部件维保的厂家也发生变化,部分机车主变流柜、转向架、轮对驱动装置经过大拆大解后,总体质量水平有所波动,除去踏面损伤这类顽疾,尤其以电器类故障占据了临修件数的绝大份额。
1 HXD3C机车主变流器CI重复故障的梳理
本文剔除外部客观因素因素所导致的故障案例,汇集2015年初以来典型的电器类故障如图2所示。
图2所示故障统计中,除CI故障外,其他故障多可采用图纸换件、查阅故障代码,在行修班组排除故障,但唯独主变流器CI故障,除了4起明显因控制变压器烧损、冷却液泄漏和内部IGBT功率器件炸裂损坏外,其余均为出厂回段整治后,上线很短时间,即频繁出现与CI自动隔离、跳主断、某轴牵引电流异常等有关的线上故障甚至机破,扰乱了铁路运输秩序,如表1所示。
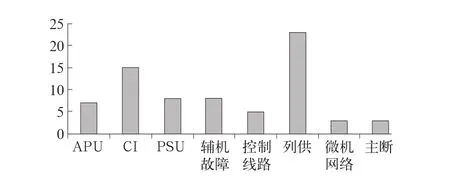
图2 2015年广州机务段HXD3C机车电器类典型故障汇总(截至11月26日)

表1 HXD3C机车CI惯性故障汇总
上述机故障车中较为典型的故障案例有:
983#机车牵引列车起动后,机车纵向晃动严重,司机误认为走行部故障,请求更换机车导致机破;423#机车完成修程作业后,单独第6轴动车时不动,这两者属于死故障,只不过983#机车,出段挂车时,随机隔离了4个轴(故障轴刚好在此之列),因此出段过程一直正常,而当6个轴全部投入牵引列车达到一定速度时,故障轴引起机车晃动,在故障机车回段走行过程中,发现为第4轮对及其悬挂装置的垂向大幅振动;423#机车则是因为轮对临修作业,更换了第6轴轮对驱动装置,技术专业工程师专门安排试验此轴性能,才发现问题,倘若按照以往交车验收作业标准,段内动车并不单独试验某轴且走车速度低,亦无发现此故障轴的可能,一旦上线牵引又将是983#机车机破的翻版。
另一类相关故障为活故障,例如388#(长沙段支配)、532#和716#机车,高速运行时,自动隔离CI或跳主断,线上小复位有时可恢复,事后查阅机车日志与微机屏故障记录,也仅有乘务员关于某轴电流异常、跳主断或者自动隔离某轴的记录,询问乘务员也是不可言状,库内故障轴单独动车也正常,考虑到HXD3C型机车为轴控,可靠性高,检查主断及其控制本身正常,调换相邻CI控制单元体后继续放车跟踪,故障具有重复性。
直到梳理714#和722#机车的故障:厂家仅仅更换714#机车1轴牵引电机速度传感器线缆与车体的连接航空插头后,经过长期跟踪考察,此类故障就此消失;722#机车则是微机屏报3轴速度异常,在此故障信息引导下,发现该轴转速传感器线缆航空插头弹簧卡口未拧到位,内部插针虚接,于是将后续出现此类故障的532#、716#机车,也做相同部位的检查,均发现有航空插头插针轻微缩针或针头氧化的现象,修复后亦无此类重复故障。而先前处理的983#机车则是由东芝更换了CI控制单元中处理牵引电机速度信号的DIP20板;423#机车第6轴电机转速信号插头插针已完全缩入,故两者为死故障。
对两类故障现象进行总结,可以得到以下规律:
(1)CI控制单元转速处理板卡故障、转速线路航空插头插针完全缩针,相当于转速信号传输通路完全切断,使得故障动力轴无法单独起动或者当动力轴全部投入起动时,故障轴导致整车低频抖动。
(2)电机转速信号线路航空插头轻微缩针或插针氧化,静止或低速运行时机车完全正常,高速运行时机车振动导致信号通路时断时通,故障轴牵引电机电流波动,CI自动隔离或微机发出跳主断指令。
上述CI惯性故障的处理中,均使用东芝分析软件下载故障数据进行分析,但由于数据存储机制的限制,未保存故障点时刻关键数据,因此只能从HXD3C型机车的牵引传动控制系统的基本控制原理着手,进行故障的分析。
2 HXD3C机车牵引传动系统概述
HXD3C型机车采用了列车控制级、机车控制级和传动控制级[2],三级牵引传动控制结构,分别实现机车间重联控制,内部逻辑控制与保护和异步牵引电机控制,三级控制结构间通过总线通信交换信息,HXD3C型机车牵引传动控制系统采用了HDLC列车总线和RS485机车总线,辅之以IO硬连线,与目前世界铁路联盟提倡的列车WTB、机车MVB通用总线不兼容,如图3所示。
2.1 HXD3C机车传动控制级中CI的作用
在HXD3C型机车中,传动控制级就是CI及其控制单元,TCMS作为机车控制级核心采集司控器级位给定和车轴转速,根据机车牵引特性生成转矩指令,在外部各种安全逻辑条件满足的情况下,通过RS485总线向CI发出转矩指令,驱动机车运行,同时CI利用RS485总线向TCMS返回当前牵引电机电流和故障信息,并在HMI界面显示。
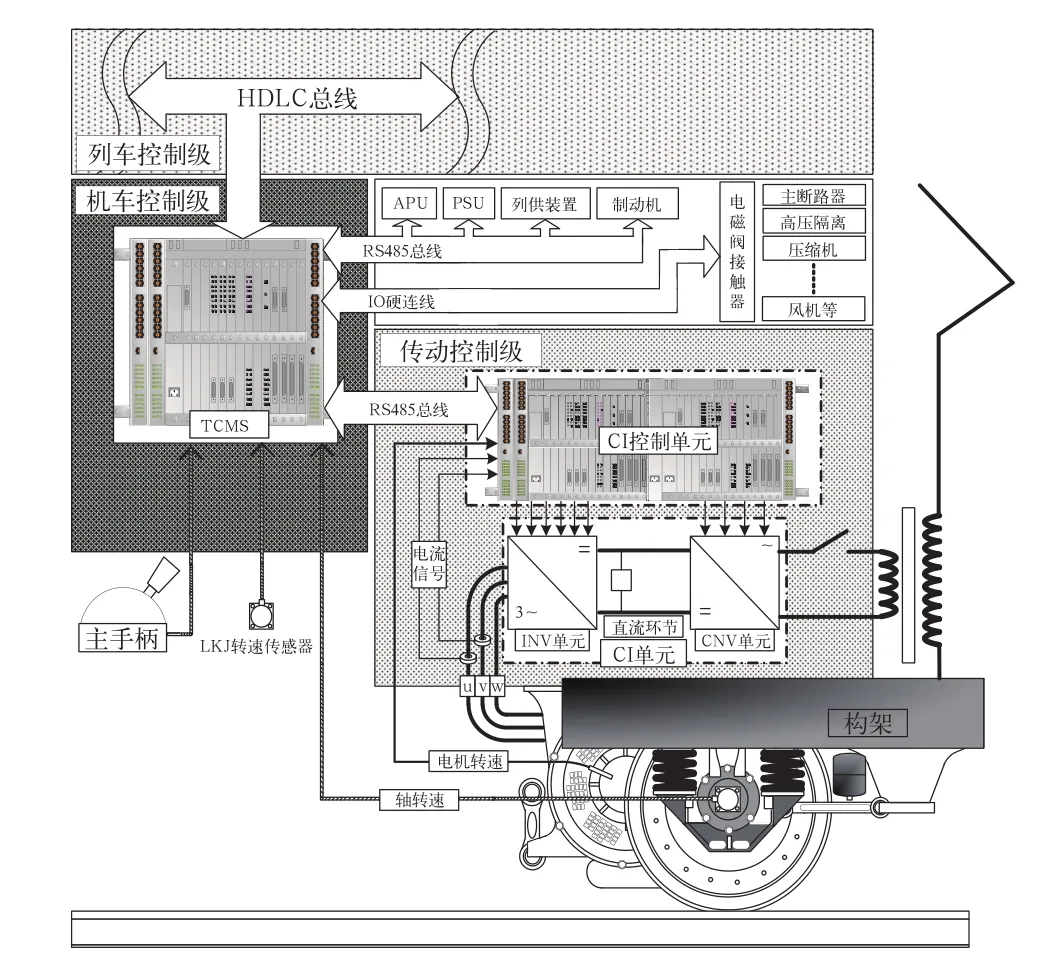
图3 HXD3C机车的牵引传动控制系统
CI是网侧变流器(Converter)、电机侧逆变器(Inverter)、中间直流环节(DC-Link)及其控制系统的合并简称,从能量流的角度考虑,接触网与牵引电机间时刻在进行能量转换。当机车处于牵引工况,电机侧变流器不断从中间直流环节吸取能量,拉低直流电压,网侧变流器及时从接触网获取能量,维持直流电压恒定,当机车处于再生制动状态,电机动能通过电机侧变流器不断涌向中间直流环节,直流电压抬升,网侧变流器及时向接触网反馈能量,抑制抬升,中间直流环节的支撑电容可以延缓直流电压的降低与抬升,对两者交换的能量进行缓冲与平抚;过压斩波电路可以泄放由于网侧变流器故障或者不能及时向接触网回馈能量时,不断从电机侧变流器奔涌而来的能量。
2.2 对CI的性能要求
网侧功率因数高、维持直流电压恒定是对CI的首要要求,机务运用作为机车的直接使用者,更为关心的是,电机侧变流器控制要求[2]:
(1)控制牵引电机的转矩,要求稳态误差小,避免较大脉动,动态响应迅速,随时应对轮-轨阻力变化。
(2)控制牵引电机的电流,既能充分发挥其效能,又不至于使电机过载发热。
(3)控制牵引电机的定子磁场,尽量减少畸变,进而减少谐波损耗及谐波转矩。
(4)控制逆变器的开关频率,使其工作于安全范围内。
尤其是第(1)点:机车牵引电机能够随时随地响应司控器手柄输出强劲的牵引转矩,转换成轮周牵引力克服各种运行阻力,且牵引力输出平稳,不至于引起列车的冲动影响舒适感。
2.3 异步牵引电机转矩的产生及其变频矩速特性
图4是简化的异步电机三相定子绕组和鼠笼转子结构示意,右侧是部分放大:
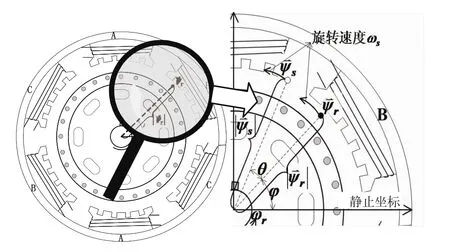
图4 异步电机三相定子绕组和鼠笼转子结构示意
当给三相定子绕组通入一定电气同步速度ωs的三相交流电压矢量u→s时,定子将产生相对静止坐标系逆时针旋转的定子磁场矢量ψ→s,它与静止的转子鼠笼导条间还产生角速度为ωsl的相对运动,因此鼠笼导条切割ψ→s产生转子感应电流矢量i→r,它一方面生成转子磁场矢量ψ→r,同时处于ψ→s中的通电导条以电机轴为轴心,产生电磁转矩Te,它克服轴阻力矩,驱动转子开始以ωr逆时针旋转,可用式(1)表示[9]:

式(1)中np、Ls、Lr和Lm均为电机已知常量,θ为定、转子磁链矢量夹角,ωs、ωsl和ωr之间的关系可用式(2)表示:

当异步电机驱动负载起动一瞬间ωr=0、ωsl=ωs,带负载稳定运行后,ωr必定小于ωs,ωsl>0,当且仅当,异步电机被负力矩拖拽再生发电时,才有ωr>ωs,此时ωsl<0,这样就给出HXD3C型机车YJ85A1异步牵引电机一定电压幅值|u→s|和ωs(50 Hz)时,ωr从0起动至2倍ωs的矩速特性曲线(电机输出转矩与转速的关系),如图5中右下角小图所示(根据永济新时速提供的YJ85A1异步牵引电机型式试验,利用Matlab软件迭代计算完成):
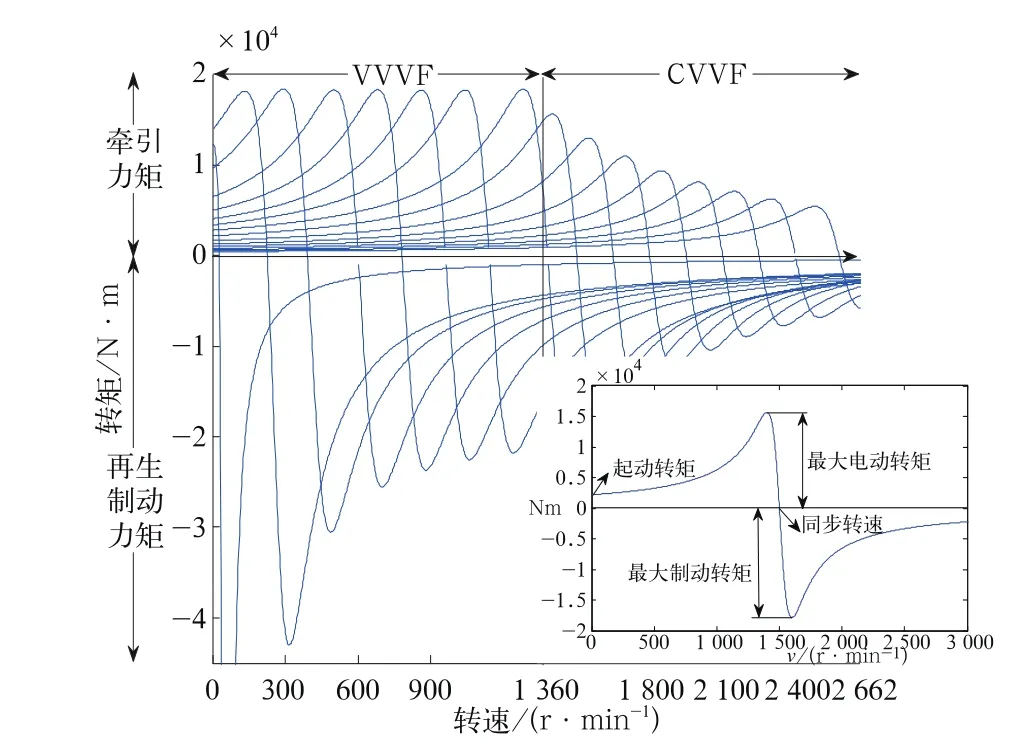
图5 HXD3C机车异步牵引电机的矩速特性及变频调速下生成的矩速特性曲线簇
2.4 异步牵引电机牵引特性的选取
异步电机虽在宽广的速度范围内均有转矩输出,却只在最大和最小输出转矩的近似线性范围内电机才具有较高的效率,对于异步牵引电机这类大型电机,还受过载倍数限制,不可直接起动,可使用范围更窄,又受起动电流倍数的限制,一起动就必须工作在此范围内[10],再综合铁路机车持续速度内恒转矩起动,持续速度外恒功率调速的牵引特性要求[3],图5异步牵引电机固有矩速曲线基础上,增加了牵引特性外包线(由HXD3C机车牵引与制动特性换算),形成图6所示HXD3C机车异步牵引电机牵引特性曲线(簇)。
对于大功率异步牵引电机,其转子电气时间常数达数百毫秒远大于定子电气时间常数,因此一个CI控制单元的控制周期ts(u s级)内,||视为常量,而||在一定ωr下已按恒定控制处理,结合式(1)、式(2)只要在牵引外包线范围内平稳的控制ωsl,使定转子磁场矢量间的夹角θ增增减减,就能实现对Te的近似线性控制,外包线范围越宽,同一速度点能发挥的最大牵引力越大,但外包线受牵引电机散热的限制,因为外包线越饱满,沿外包线加速时异步牵引电机ωsl越大,铜耗越大;其次受轮轨黏着力限制,输出过大转矩引起空转或滑行;再次受牵引逆变器IGBT通态电流及温升限制,否则大电流会损坏逆变器;最后受转矩倍数限制,YJ85A1异步牵引电机最高转速点的牵引外包线几乎和最大转矩重合,如图6中的d点,如果再提升可能落入转矩颠覆区。

图6 HXD3C机车异步牵引电机的闭环控制牵引特性曲线簇
3 转速信号在异步牵引电机的闭环牵引特性控制中的重要性
牵引外特性的选取固定了各速度点能发挥最大牵引力,也就限制了机车恒流起动过程中的电流大小,保证了机车电气传动设备的安全,但要实现上述目标必须使用异步牵引电机交流调速控制策略,主要有转差频率控制、磁场定向控制和直接转矩控制[2],虽然各种控制策略名称迥异、复杂程度不一、具体实现各异,但都殊途同归:通过调节ωsl控制Te。对于转差频率控制、磁场定向控制而言,需要通过电流环间接完成对ωsl的调节,间接控制Te,Te响应较慢;对于直接转矩控制,直接利用定子电压调节ωsl,Te响应迅速,日本多采用糅合转差频率控制与磁场定向控制的间接转子磁场定向控制,例如HITACHI的新干线动车,而TOSHIBA的EF510型机车(HXD3C机车原型),除了笼统的提及PWM矢量控制,并无详细案例介绍,仅从该国技术的简单实用性判断,应该也采用了类似的方案,如图7所示。
图7中阴影B部分就是HXD3C机车传动控制级CI中的电机侧变流器控制单元所要计算完成的异步电机间接转子磁场定向控制框图,所谓转子磁场定向控制,必须以当前时刻转子磁场定向准确为前提,即通过测量的定子电流矢量i→s和ωr,再利用图7中①、②、③、④等模块算出当前时刻转子磁场矢量ψ→r在图4中的位置角φ和大小||,如果转子磁场定向不准确,例如计算||偏大或偏小,则在相同ωsl下,式(1)计算的Te与电机实际输出转矩相比将偏小或偏大,但这尚且是量的差异;但如果位置角φ不准确,则式(1)中的sinθ改变的不仅是大小,甚至可能是质的翻转:
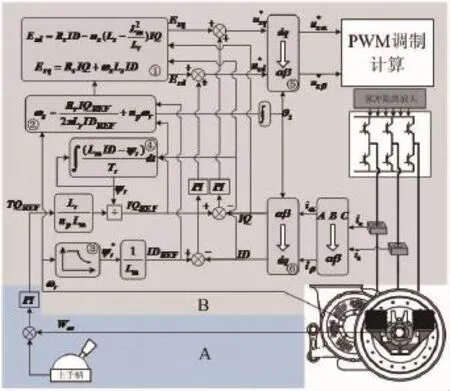
图7 HXD3C机车异步牵引电机的闭环控制框图
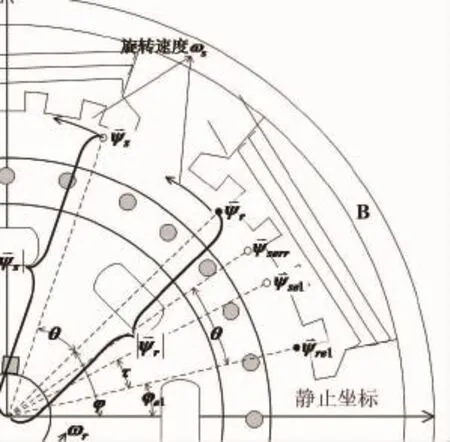
图8 异步电机定、转子磁场位置对转矩的影响

4 HXD3C机车CI惯性故障的理论还原
通过以上对HXD3C机车牵引传动系统以及异步牵引电机控制的详细分析,为牵引电机转速信号异常导致的CI惯性故障分析定位提供了理论依据,因此可以对第1节中两类故障的发生过程进行还原:
(1)983#机车CI控制箱DIP20插件板器件板卡损坏失效;423#机车在更换轮对驱动装置过程中,作业失误导致转速信号航空插头公头缩针,两者转速信号完全中断。当两台机车在上线运行,司控器手柄离开零位一瞬间,直流电压建立,6个CI先向异步牵引电机输出一固定脉冲电压,建立定子磁场,然后输出初始频率为0.9 Hz的变频电压,电压大小由当前司机手柄级位决定,牵引电机开始产生电磁转矩,转速信号通道正常的5个CI开始将转速反馈信号纳入闭环控制,进行VVVF调速,整车开始起动,而转速信号切断的CI,认为当前转子仍静止,仍输出一固定电压矢量,但由于其他5个正常轴的拖动,故障轴转子鼠笼导条不断切割定子磁力线,做电阻制动运行,因此故障轴的牵引电流与其他5轴差异明显,且电阻制动转矩随着速度增加而增加,故障轴的反扭矩使转向架发生低频振动,最终TCMS通过检测各CI传送的电机转速差异,发现故障轴并作出提示,但在此之前司乘人员已经发觉机车异样,提前回司控器手柄;而两台机车在库内单独故障轴动车时,由于故障CI一直未检测到速度,所以始终发出固定脉冲电压,因而微机显示屏一直显示稳定的牵引电流,但机车纹丝不动,又因其他CI已经处于隔离状态,故又不作出任何速度异常提示。
(2)对于388#这类牵引电机转速信号传输线缆航空插头轻微缩针或插针氧化的活故障,则需借助图9加以说明:
图9中,假设司控器级位置11级,对应目标速度110 km/h(轮对踏面直径1250 mm,换算电机轴转速2 430 r/min),此时各牵引电机稳定运行于a特性曲线对应的a负载点(速度109 km/h,电机轴转速2410 r/min),电流均一致,在此速度下又恰逢列车上坡,运行阻力大于a点牵引力,速度下降,TCMS根据LKJ速度反馈环和牵引特性,增加了CI转矩给定,这样各CI将不断增加转差频率ωsl以增加牵引电机的转矩输出,最终牵引电机在b特性曲线对应的b负载点(速度106 km/h,电机轴转速2 360 r/min),与此时列车阻力平衡,速度重新稳定,对于其他5个正常CI都使牵引电机顺利的过渡到b点,而存在转速信号故障隐患的轴,由于各种振动,其转速反馈信号突变为0,故障CI在此假信号误导下,计算出错误的u*s,使该轴牵引电机由a特性曲线的a点,过渡到c特性曲线对应的c点,而c特性曲线的定子频率正是机车起动瞬间所对应的0.9 Hz,此时故障轴进入再生制动,且如第2.5小节所述,c点并不在异步牵引电机牵引外包线范围内的近似线性段上,处于异步电机矩速特性的不稳定区,此时映入司乘人员眼帘的是微机显示屏上故障轴电流的剧烈波动,剧烈的电流波动将引起中间直流环节能量的异常流动,CI自我保护,自动隔离或者引发跳主断,而当信号又恢复正常,司机再次恢复CI后,故障亦不再重复。

图9 HXD3C机车异步牵引电机控制外特性
5 结论与建议
电机转速信号对使用磁场定向控制策略的异步牵引电机影响巨大,它是磁场位置估算的基础,错误的转速信息将使牵引电机输出转矩失控,对齿轮箱等机械部件产生损伤,同时也使CI逆变装置处于极不稳定的状态,而电机转速传感器,由于其特殊的安装位置和厂家质保方式,在机务段的修程作业时难以顾及,其次HXD3C机车牵引电机转速传感器与车体连接线缆柔性差、长度余量少,对于同一转向架的1、3牵引电机在通过小半径曲线时与车体的回转空间大,较硬的线缆频繁拖拽破坏航空插头,此外由于HXD3C机车踏面损耗较为严重,频繁更换轮对驱动装置过程中,往往只重视对三根牵引大线的紧固和检查,对待转速信号航空插头一推了事,不够细致往往造成弯针和缩针,因此建议:
(1)修程作业加强对此航空插头的卡口检查,安装过程务求细致谨慎。
(2)在进厂修更换较为柔软且有较长余量的连接线缆,将航空插头的沿轨道平行布置变为横向布置。
(3)修改程序,TCMS也应将LKJ车速送入CI,使CI具备自我剔除错误电机转速信号的能力。
[1] 张忠玉.HXD3电力机车交流传动系统设计研究[D].大连:大连交通大学硕士学位论文,2009.
[2] 黄济荣.电力牵引交流传动与控制[M].北京:机械工业出版社,1998.
[3] 冯晓云.电力牵引交流传动及其控制系统[M].北京:高等教育出版社,2009.
[4] 宋文胜.电力牵引交流传动控制与调制技术[M].北京:科学出版社,2014.
[5] 马惠春.100 k W四象限变流器及其控制[J].机车电传动,2005,(4):27-35.
[6] 邹 仁.四象限变流器瞬态电流控制的仿真研究[J].机车电传动,2003,(6):17-20.
[7] 李 伟,张 黎.交—直—交传动系统网侧变流器预测电流控制方法的计算机仿真及实现[J].中国铁道科学,2002,23(6):49-54.
[8] Holms G K,Chang C C,Chen C L.Analysis and Implementation ofa delay compensated deadbeat current controller for solar inverters[J].IEE Proceeding-Circuits Devices Systems,2001,148(5):279-286.
[9] 沈本荫.现代交流传动及其控制系统[M].北京:中国铁道出版社,2007.
[10] Bose B K.现代电力电子学与交流传动[M].北京:机械工业出版社,2005
Influence of Traction Motor Speed Sensor Failure on Main Power Unit of HXD3C AC Drive Locomotive
LIU Yingjun1,LIAO Yongheng2
(1 Locomotive Department,Guangzhou Railway(Group)Corporation,Guangzhou 510088 Guangdong,China;2 Guangzhou Locomotive Depot,Guangzhou Railway(Group)Corporation,Guangzhou 510031 Guangdong,China)
The features of HXD3C AC drive locomotive and its application in Guangzhou Locomotive Department are introduced,and the CI inertia faults related to rotational speed signal frequently happened after C4 repair process are induced.Aiming at these faults,this paper analyzes the control theory and control target of traction system,and deduces the nature torque-speed characteristic and close-loop control characteristic.Based on the cross-correlation analysis of asynchronous traction motor speed,slip frequency and stator synchronous speed,the effect of rotational speed in rotor flux calculation is qualitatively analyzed.The result shows that the error of rotational speed signal which leads to the wrong rotor flux field oriented and generates the error stator reference voltage vector is the main cause of these inertia faults.The improvements are proposed to improve the stability of rotational speed signal.
HXD3C locomotive;CI inertia fault;torque-speed characteristic curve;rotor flux field oriented;stator reference voltage
U264.1
A
10.3969/j.issn.1008-7842.2016.06.17
1008-7842(2016)06-0065-07
3—)男,工程师(
2016-05-31)
