自动泊车系统模拟样机的设计与制作
2016-02-02李德才
国 芳, 夏 帅, 李德才, 李 琨
(1.江苏建筑职业技术学院,江苏 徐州 221116;2.中国矿业大学徐海学院,江苏 徐州 221008)
自动泊车系统模拟样机的设计与制作
国 芳1, 夏 帅2, 李德才2, 李 琨2
(1.江苏建筑职业技术学院,江苏 徐州 221116;2.中国矿业大学徐海学院,江苏 徐州 221008)
随着汽车数量的飞速增加,城市停车空间日趋紧张,泊车环境越来越复杂,车辆泊车入位困难问题日益突出,自动泊车系统已成为国内外研究的热点问题。针对实际系统体积大、成本高、系统复杂等问题,设计制作了适用于实验室研究的模拟样机,对自动泊车路线进行了规划设计和程序设计,并在模拟样机上实现水平式、垂直式两种车位的自动泊车功能。
自动泊车;模拟样机;路径规划;最小转弯半径
0 引言
经济的发展提高了人们的生活水平,汽车的普及在为出行提供便利的同时也遇到了诸如停车位不足、停车位空间紧凑、泊车困难等问题,泊车操作过程中出现的事故频繁发生。据2006年密歇根大学交通研究所的交通事故调查报告统计:因泊车操作引起的交通事故,占所调查全部交通事故的44%,其中进入车位事故发生率为34%,驶离车位事故发生率为10%[1]。为提高汽车使用的安全性和舒适性,满足消费者对泊车系统的需求,自动泊车系统已成为国内外研究的热点。
20世纪40年代开始了对自动泊车辅助系统的研究,通过泊车辅助装置引导驾驶员转向操作,辅助驾驶员完成泊车。20世纪80年代后期,电动助力转向系统的产生推动了自动泊车系统的研究,电控转向技术的日趋成熟使泊车系统研究取得了较大进展。目前,国外已经有多家公司为高端豪华车型配备了自动泊车功能,但国内对于自动泊车系统的研究起步较晚,与国外公司仍存在较大差距。
自动泊车系统的关键技术问题主要包括全车位检测、路径规划、路径跟踪等三大问题。自动泊车实际系统体积大、造价高、场地要求高、实验存在较大安风险,不利于学校实验室研究和教学工作,基于以上问题,此文设计制作了一套自动泊车系统的模拟样机。
1 模拟样机硬件电路设计
自动泊车模拟样机以全国大学生智能车竞赛专用A车模作为控制对象,该车模采用7.8V充电电池供电,便于传感器、电路板的安装。根据自动泊车系统的功能要求,系统硬件主要包括车位检测、转向控制、路径测量、车速控制、人机交互接口、电源管理等部分,自动泊车系统的整体硬件框图如图1所示。

图1 自动泊车系统整体硬件框图
1.1 自动泊车控制系统
自动泊车系统不仅要采集车位、车速等信息,还要进行复杂的路径规划和转向、车速控制[2],综合以上因素,选择飞思卡尔公司生产的Kinetis K60型号单片机为自动泊车系统的控制芯片。K60为基于ARM Cortex M4内核的混合信号为处理器,采用32位处理器内核,总线频率可达200MHz,合了最新的低功耗革新技术,具有高性能、高精度的混合信号能力,并且具备PWM、DMA、ADC、DAC等丰富的外设资源,可满足自动泊车系统的控制需要。
1.2 车位检测与转向控制
1.2.1 测距传感器选择与布置
常用的测距模块包括红外测距、激光测距、摄像头测距、超声波测距等,表1为几种测距方式的对比分。综合探测距离、响应时间、成本等因素考虑,最终确定本系统采用型号为HC-SR04的超声波传感器进行距离检测。
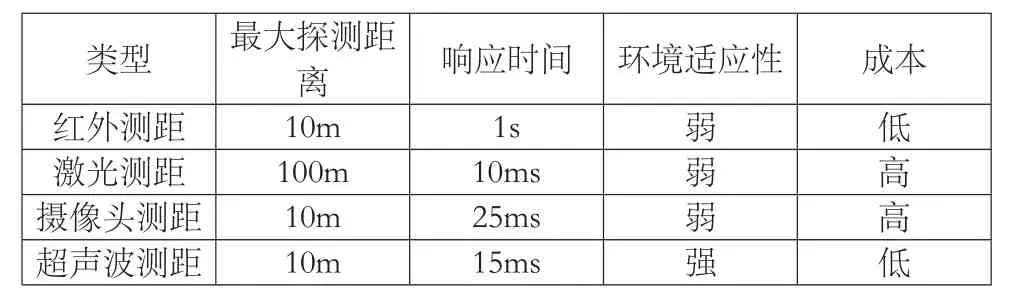
表1 几种测距方式的对比
为实现对车位的准确检测,本模拟样机共采用8只超声波传感器,空间布置如图2所示。
转向控制采用型 号 为 Futaba S3010舵机伺服器,该舵机6V时扭力可达6.5kg.cm,动作速度0.16±0.02sec/60°,可满足模拟样机的转向控制。
1.3 路径测量与车速控制
自动泊车系统运行中,需要根据路径确定转向、速度,因此需要实时获取车模的位置,本设计中采用欧姆龙E6A2-CW3C型 200线增量式编码器进行转速的检测,通过对转速的积分获取路径信息。

图2 超声波传感器的空间布局
泊车过程中,需要对车模运行速度进行控制,模拟样机是通过一直流电机带动车模运行,因此需要设计直流电机的驱动电路。本模拟样机中采用了由两片BTS7970驱动芯片组成的H桥式直流电机驱动电路,电路图如图3所示。
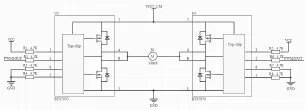
图3 车速控制电路设计
1.4 电源管理电路
模拟样机采用7.8V电池提供电能,而单片机最小系统需要3.3V供电,超声波模块和直流电机驱动模块需要5V供电,舵机转向系统需要6V供电,因此在向各个模块提供电能时,需要进行电压的转换,已确保系统的正常稳定工作,图4给出了系统电源管理电路的框图。
2 车位检测与路径规划
2.1 自动泊车最小转弯半径计算
最小转弯半径指的是当转向机构转到极限位置时,车辆以能使车辆稳定的最低车速转向行驶时,其外侧转向轮中心平面在地面上滚动的轨迹圆半径。它所表征的是车辆能够通过弯曲狭窄地带或者能够绕过不可越过障碍物能力。转弯的半径越小,车辆的机动性能就越好。

图4 模拟样机电源管理电路框图

图5 最小转弯半径轨迹
根据图2所示的车模参数,其中,La表示车长,Wa表示车宽,不包含后视镜、转向灯等部位;轴距用Lb表示;前悬长用Lc表示;后悬长设为Ld。结合图5所示的最小转弯半径轨迹可得:

车道内边沿所在的圆的半径:

车辆外轮廓运动轨迹所在圆的最外沿半径:

以最小半径转弯时车道安全宽度:

2.2 超声波测距与车位检测
当超声波从空气垂直入射到固体表面时,产生全反射,反射回来的回波具有足够的能量被接收探头收到,实现距离测量。单片机实现超声波测距的计算公式如式(5)所示。

其中:v表示超声波在空气介质中的传播速度,Ts表示单片机中设定的中断周期,M表示在一个脉冲读取周期内进入中断的次数。
以水平式车位自动泊车为例说明车位检测的原理。当自动泊车功能启动后,位于车模右侧的传感器器实时车模右侧距离是否大于车模宽度,同时,编码器路径测量模块记录车位长度。当车位宽度和长度均大于设定值时,表明该车位可停车,实现车位的检测。
2.3 自动泊车路径规划
当车位通过可行性验证后,自动泊车系统开始规划路径进行泊车。此文针对两种最常见的水平式、垂直式泊车位阐述路径规划原理和泊车过程。
2.3.1 水平式泊车位路径规划
结合图6阐述水平式泊车位路径规划过程:
(a)寻找空闲车位:找到最小转弯半径圆所指的圆心。(b)进入第一个最小圆轨迹:确定车位水平距离。(c)进入第一个最小圆与第二个最小圆轨迹的交点。(d)车辆到达预定位置,车辆进行局部调整。
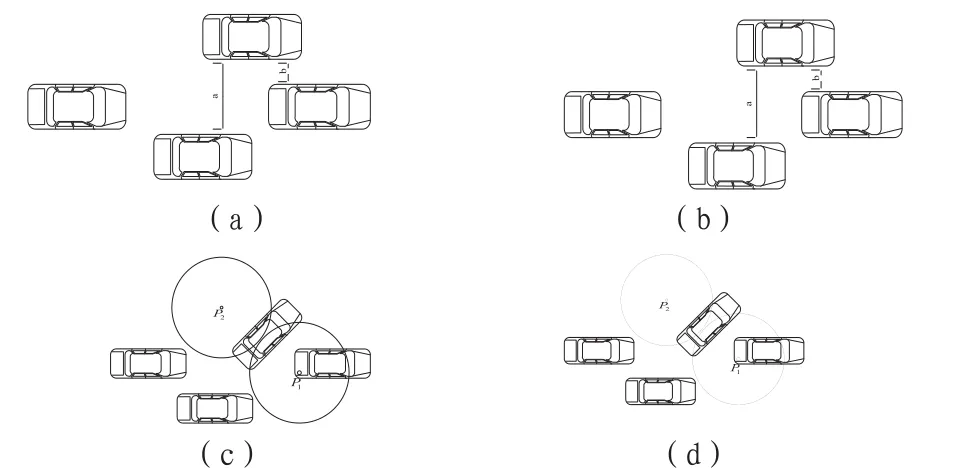
图6 水平车位自动泊车路径规划
2.3.2 垂直式泊车位路径规划
结合图7阐述垂直式泊车位路径规划过程:
(a)四分之一圆轨迹路径。(b)车辆泊车后期的局部调整。
3 自动泊车系统软件设计与测试
需要泊车时,通过功能按键启动自动泊车功能,选择车位类型,控制系统通过车位检测单元检测车位数据并进行泊车路径规划并进行可行性分析。只有当可行性验证通过后,路径测量模块实时检测汽车位置,并调整汽车运行速度,并将汽车位置在液晶显示器输出显示。整个系统的程序流程图如图8所示。
编写自动泊车系统的程序,并在实验室搭建简易停车位进行水平式、垂直式两种停车位的自动泊车实验,自动泊车过程如图9、10所示。实验结果表明,所研究的车位检测、路径规划及转向、转速控制实现了模拟样机的自动泊车功能,达到了预期目标。

图7 垂直式车位自动泊车路径规划

图8 自动泊车系统程序流程图
4 结语
此文设计制作了一种自动泊车系统模拟样机,通过8只超声波传感器器获取车位数据,采用最小转弯半径原理对自动泊车路径进行了规划,实现了水平式、垂直式两种车位的自动泊车功能。

图9 水平式停车位自动泊车系统测试
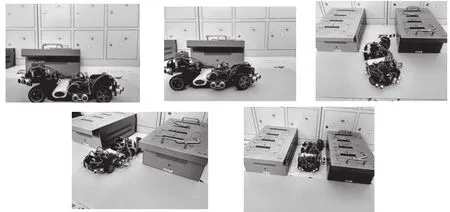
图10 垂直式停车位自动泊车系统测试
[1]李红.自动泊车系统路径规划与跟踪控制研究[D].长沙:湖南大学,2014.
[2]王芳成.自动平行泊车系统的研究[D].合肥:中国科学技术大学, 2010.
[3]高航.自动垂直泊车方法研究[D].合肥:中国科学技术大学, 2011.
[4]姜辉.自动平行泊车系统转向控制策略的研究[D].吉林:吉林大学,2010.
[5]宋金泽.自动泊车系统关键技术研究[D].长沙:国防科学技术大学,2009.
10.16640/j.cnki.37-1222/t.2016.22.038
国芳(1985-),女,硕士,中级,主要研究方向:电力系统分析。
