某紧凑型弹仓动力学分析
2016-01-29周杰
周杰
(南京理工大学 机械工程学院,江苏 南京 210094)
某紧凑型弹仓动力学分析
周杰
(南京理工大学 机械工程学院,江苏 南京 210094)
摘要:为了更加适应新环境下的现代化战争要求,大口径火炮武器将来采用自动化装填系统是大势所趋。以某大口径火炮的紧凑型弹仓为研究对象,以使弹仓更加紧凑,节省有限的火炮弹仓,传动更加平稳等为目的,对其进行动力学分析。运用adams软件进行动力学仿真 ,仿真结果由adams给出的二维图展示。
关键词:紧凑型弹仓;动力学分析;链传动;平稳
Dynamic Analysis of Compact Magazine
ZHOU Jie
(School of Mechannical Engineering, Nanjing University of Science &Technology, Nanjing 210094,China)
Abstract:In order to adapt modern warfare to the new environment, the inevitable trend of its development is that the automatic loading system is used in the large caliber guns. This paper takes the compact magazine of a large caliber gun as study object. It aims at making the magazine more compact, saving the place of the limited gunmagazine and letting the transmission be more smooth. It also does the dynamic analysis and simulation of this gunmagazine, using the ADAMS software. The simulation results are showed in the two-dimensional map.
Keywords:compact magazine;dynamic analysis;chain drive;smooth
0引言
未来对军事战车的需求是,具有无与伦比的火力保护,集成到一个高流动性如坦克等战车上。战车要有较低的质量并减少车载人员。为了满足这些需求,所有系统都必须紧凑,质量轻,能够以最小的消耗空间被包装在一个战斗车辆内[1]。文中主要研究某紧凑型弹仓,将其简化并对其进行动力学分析。
1紧凑型弹仓的结构分析
弹仓包括一个壳体,壳体包括一个卸弹端口和一个弹药输送机[2-3]。弹药输送机有一系列的弹筒,每个弹筒包括一对刚性的接合单元,每个弹筒宜于保留弹药。这些弹筒通过内外链板相互连接可转动,形成一个输送机链,和被耦合到驱动链的输送机链条沿蛇形路径面对提取位置端口,进行卸弹[4-5]。另外,在按照上述目标,方案中提供了一种弹药输送机[6],包括壳体,它具有一个弹药端口和弹药输送机[7-8]。弹药输送包括由一个单一的运行在共同的垂直平面互连的单元输送链(如图1)。成员包括壳体指导弹筒在运送沿着蜿蜒的路径,包括多个层次的水平运行,并连接180°和90°的旋转。复数包含在输送传动系统驱动链轮,链条输送指引单元提取面朝出口的位置,通过它指引卸下弹药。为了分析简化,弹链设计为一圈16个弹筒(已编1~16号)连在一起(如图2),不分析多层循环蛇形弹链连接。

图1 紧凑型弹仓传动示意图
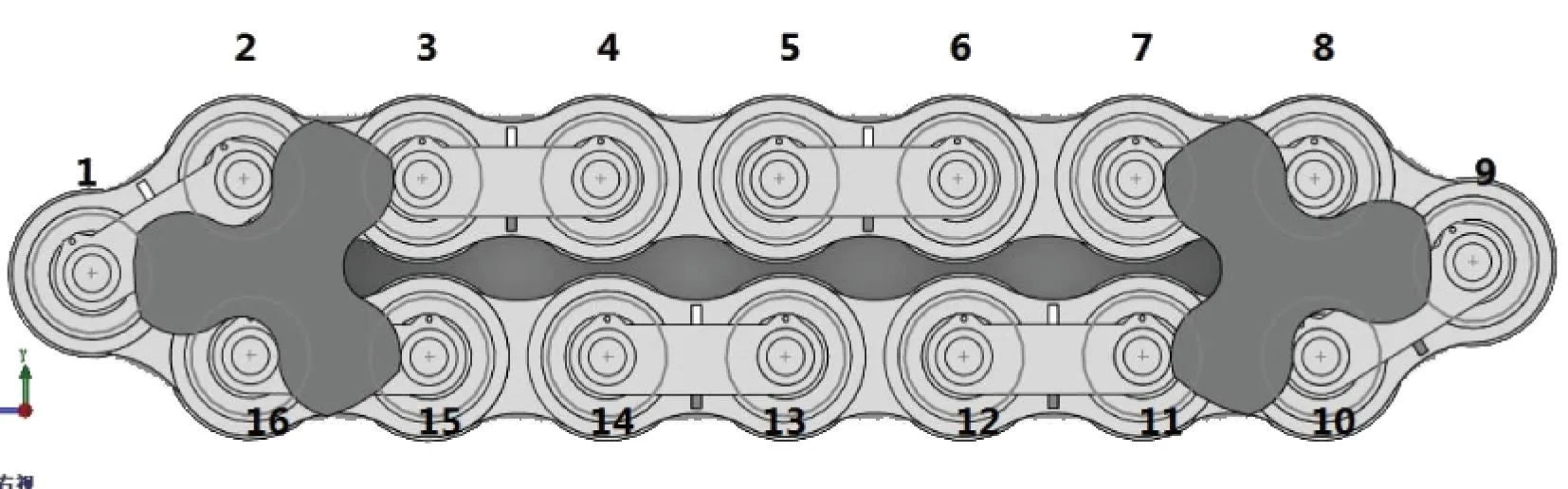
图2 紧凑型弹仓简化为一圈弹链图
弹筒间具体连接方式爆破图如图3所示。由3个弹筒示意,3个弹筒由外链板,内链板相连,内外链板间用隔板隔开。弹筒上端套上滚子套,顶端加上顶盖,顶盖与弹仓内壁贴合,通过链轮拨动滚子套实现整个弹链的传动。一个弹筒移动至下一个弹筒的距离为180mm。

1—弹筒;2—内链板;3—隔板;4—外连接器;5—滚子套;6—顶盖图3 弹筒连接方式
2紧凑型弹仓的动力学分析
紧凑型弹仓供弹机系统的动力学仿真是将弹仓的弹链模型输入到虚拟仿真软件Adams中,定义相应的约束,并且添加驱动,模拟实际的工作状态,得到相应的数据来进行分析[9-11]。
2.1弹链拓扑学分析
如图2所示有16个弹筒,8个外连接器,8个内链板,16个滚子套,所以在Admas里要定义32个转动副,其中16个是弹筒和外链板间的转动副,另16个是内链板与弹筒之间的转动副,还要定义链轮和16个滚子套间的接触。为了模拟方便,将弹筒和弹丸看作整体,相互之间的接触力忽略不计。
2.2紧凑型弹仓的驱动
弹仓传动中选用较为成熟的蜗轮蜗杆传动,蜗轮与弹仓中链轮相连。电机的驱动力矩Td由实验室获得的电机机械特性给出,驱动系统包括2台400W的电机,一对齿轮减速和一对蜗轮蜗杆减速组成,其驱动简化原理图如图4。其中取蜗轮蜗杆的传动效率是0.5,选取齿轮的传动效率为0.95,滚轮和轨道的摩擦因数是0.1。电机不受反馈控制,电机输入的转矩是经过实验测试以后的电机特性给出的,其特性见图5。

图4 紧凑型弹仓驱动原理简化图

图5 电机转矩特性
2.3紧凑型弹仓传动链的仿真分析
紧凑型弹仓传动链在传动时,链轮与滚子之间一定会产生冲击力,并且在不同工作状态下其受力情况也不一样。为了更好地对其进行动力学分析,分以下两种情况分析计算:
a) 弹仓所有弹筒载满弹;b)主动轮处载满弹,而被动轮处不载弹。
空载情况对文中研究没有太大参考价值,所以忽略。主动轮处不载弹,被动轮处载满弹时与第二种情况相反,其不仅要克服弹仓的摩擦力与惯性力,还要克服弹丸的重力做的负工,所以这种情况是紧凑型弹仓最差的工作状况之一,文中也未对这种情况作分析。
1) 弹仓所有弹筒载满弹
如图6中链轮扭矩大约在0.23s左右降为0N·mm,对应图7中链轮角速度为145 °/s左右,这是因为由图5的电机转矩特性知,当电机转速>145 °/s时,其扭矩为0。但当在0.51s~0.62s这一时间段时,图7中链轮的扭矩出现了一个小波峰,这个波峰的值达到1.61e5N·mm。出现此波峰的原因是在0.51s时链轮与弹仓3上的滚子套发生接触,产生冲击力。此时链轮角速度也开始下降。

图6 链轮扭矩

图7 链轮角速度
接触力是反映紧凑型弹仓传动平稳性的重要指标之一。为此将计算紧凑型弹仓的链轮与已接触滚子、将接触滚子间的接触力,提高这种紧凑型弹仓的传动平稳性。主要分析链轮与已接触的滚子套2还有将要接触的滚子套3之间的接触力。
如图8中,紧凑型弹仓启动之后链轮与滚子套之间的接触力一开始为3942N,然后慢慢地下降,在0.23s左右降到1200N,在此情况波动。在0.51s突然跃升至3800N左右,然后又急剧下降至550N。在0.53s出现此波峰的原因是弹仓3进入与链轮的接触,产生较大冲击。图9是链轮与滚子套3间的接触力,就是滚子套3刚接触链轮接触的情况。也就是在0.52s时滚子套3与链轮产生接触,波峰达到2750N,然后到达1300N左右波动。

图8 链轮与滚子套2接触力

图9 链轮与滚子套3之间的接触力
2)主动轮处载满弹,而被动轮处不载弹
当紧凑型弹仓中主动轮处满载而被动轮处空载时,弹丸的重力将会做正功,这样对电机的驱动是有利的,链轮在工作时会转的更快。
如图10中在0.125s左右链轮扭矩降为0N·mm,之后一直为0N·mm,这是因为在0.125s时链轮角速度达到145°/s,而之后因为是主动轮满载,被动轮空载,链轮做加速运动,其角速度一直>145°/s,所以转矩在0.12s后一直为0N·mm。如图11中链轮角速度在1.25s时达到145°/s,之后角速度一直>145°/s。出现两次波动是链轮与弹筒3、弹筒4上的滚子套发生接触,产生冲击力,导致链轮速度降低,但并未降低到145°/s以下,故链轮扭矩一直为0N·mm。

图10 链轮转矩

图11 链轮角速度
如图12是链轮与弹筒2上滚子的接触力,刚接触时达到峰值3880N,之后缓慢下降,在0.14s左右到达1300N后左右波动。在0.41s左右弹筒3上滚子套与链轮发生接触,接触力突然上升达到3650N,之后下降波动直到降为0N·mm,但是在0.72s时弹仓4上滚子套与链轮发生接触,其接触力也瞬间上升至4400N。图13是链轮与弹筒3上滚子套之间的接触力,在0.41s开始发生接触,其接触力为2700N,之后当弹筒4上滚子套进入接触时,弹筒3上滚子套受力达到峰值7650N。

图12 链轮与滚子套2接触力

图13 链轮与滚子套3接触力
3结语
通过对某紧凑型弹仓的动力学分析研究,经过简化后导入Adams中分为两种情况,得到相关分析数据。文中的动力学分析结果可为以后进行弹仓设计时作为参考,使弹仓更紧凑传动并显得更加平稳和流畅。
参考文献:
[1] 侯保林,樵军谋,刘琮敏. 火炮自动装填[M]. 北京:机械工业出版社,2010.
[2] 濮良贵,纪名刚. 机械设计[M]. 北京:高等教育出版社,2001.
[3] 王义行,等. 链条输送机[M]. 北京:机械工业出版社,1997.
[4] 王义行,李欣欣. 工业链条的应用与发展[J]. 新技术新工艺,1993,(5):18-19.
[5] 孟祥宾,等. 德国链传动标准译文集[M]. 北京:中国标准出版社,2003.
[6] 成大先. 机械设计手册(单行本)[M]. 北京:化学工业出版社,2007.
[7] 曾军令. 齿形链在火炮弹药自动装填系统中的应用研究 [D]. 南京:南京理学,2011:18-21.
[8] 彭青. 某链式回转弹仓的设计研究 [D]. 南京:南京理工大学,2012.
[9] 高文攀. 平行分度凸轮的参数化加工及实验研究[D]. 秦皇岛:燕山大学,2007.
[10] 潘同庆. 平行分度凸轮机构的轮廓设计和动力学分析[D]. 青岛:中国海洋大学,2009.
[11] 潘新安. 大型喷浆机器人的动力学分析研究[D]. 泰安:山东科技大学,2007.


收稿日期:2014-12-30
中图分类号:TJ303
文献标志码:B
文章编号:1671-5276(2015)04-0188-04
作者简介:周杰(1988-),男,江苏南通人,硕士研究生,研究方向:火炮自动武器。
