某机载合成孔径雷达伺服平台结构设计
2016-01-28杜勇,李钊
杜 勇,李 钊
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
Structure Design of an Airborne SAR Servo Platform
DU Yong,LI Zhao
(No.38th Research Institute of CETC, Hefei 230088, China)
某机载合成孔径雷达伺服平台结构设计
杜勇,李钊
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
Structure Design of an Airborne SAR Servo Platform
DU Yong,LI Zhao
(No.38th Research Institute of CETC, Hefei 230088, China)
摘要:基于某机载合成孔径雷达系统所处的工作环境及设计要求,提出了一体化弱刚性驱动系统,并对伺服平台结构设计进行了必要的分析和计算,主要解决整体空间布局设计、扫描器集成化结构设计、扫描器驱动力分析和扫描器传动精度分析等。通过试验验证,系统达到了设计指标要求。
关键词:机载合成孔径雷达;弱刚性;扫描器
中图分类号:TJ03
文献标识码:A
文章编号:1001-2257(2015)07-0047-03
收稿日期:2015-04-13

Abstract:According to the work environment and design requirements of the Airborne SAR, an integrated weak rigidity driving system is put forward in this paper. The necessary analysis and calculations of the servo platform structure design are also discussed. The overall spatial layout design, scanner integrated structure design,driving forces of the scanner analysis and transmission precision of the scanner analysis are discussed. The test and measured data validate the detection capability of the system design.
Key words:airborne SAR;weakly rigid;scanner
0引言
合成孔径雷达SAR是一种高分辨有源微波遥感成像雷达。采用一体化的结构设计和实现高精度,是当今合成孔径雷达的重要研究内容。研究机载合成孔径雷达作为某机载综合侦察系统中的一部分,应用于情报搜集和侦察。该雷达是前期某无人机机载雷达的延伸系列,在充分借鉴继承原雷达高可靠性和高集成设计等优点的基础上,通过加装新型的扫描器,提高了合成孔径雷达的扫描范围。针对机载雷达所处的复杂力学环境,优化了雷达系统的空间布局、强化雷达扫描器的可靠性。
1雷达结构总体
合成孔径雷达在结构上由有源天线系统、扫描器前端、扫描器后端、伺服控制器、安装架和转接板等组成。有源天线系统通过其前端框、后端框分别与扫描器前端、扫描器后端连接,扫描器通过安装架和机体连接在一起。雷达总体机构如图1所示。

图1 雷达总体布局
由于本雷达天线采用有源相控阵体制,因此雷达整机的环控设计采用以液体冷却为主,结合自然散热的方案,雷达散热的冷却液由载机提供。为了使天线框架更紧凑,天线阵面除了满足电讯要求外,还要成为承力构件,天线阵面与天线框架融为一体,天线下片架与液冷进水、出水主管路一体化设计,天线上片架与盲配转接板一体化设计, 采用一体化集成设计理念可以有效降低雷达系统的体积和重量。
2扫描器结构设计
由于在空中动态环境下天线轴端的变形较大,空中动态时,天线变形分别作用在扫描器前端与有源天线系统前端框的连接面、扫描器后端与有源天线系统后端框的连接面。前、后连接面的相对角位移在垂直面内为± 0.45°,水平面内为± 0.2°,前、后连接面的X、Y、Z向相对位移为±3 mm。此外还要顾及天线/扫描器制造、安装引起的两端轴轴线的不重合问题,因此有必要采用一些特殊的结构来保证传动系统的可靠性和精度。
该扫描器采用一轴分体式结构形式,由扫描器前端和扫描器后端组成。天线安装在扫描器前端和扫描器后端之间。扫描器在断电的情况下可适应飞行环境,并且在地面维修时可由人力转动。扫描器采用“半调心”方案,扫描器前端是驱动端,采用2个角接触轴承;扫描器后端为非驱动端,采用1个调心轴承,并且在轴向可以“游动”。驱动系统采用单电机+减速机+末级齿轮的驱动形式。考虑天线的热涨冷缩量(±3.5 mm)、天线两端轴的位置公差(±0.5 mm)、扫描器的位置公差(±1 mm),后端轴承“游动”量定为±5 mm。本着“空间和重量最小化”原则设计整个扫描器结构,扫描器前端和后端的结构如图2所示。

图2 扫描器结构
3扫描器驱动力矩计算及校核
扫描器驱动的负载有偏心力矩、惯性力矩、摩擦力矩及干扰力矩等。各力矩分析如下:

Me=nmge=1.5×160×9.8×0.01=
23.52N·m
b.惯性力矩Mβ为天线转速变化时所产生的力矩。天线转动惯量为:

3.12kg·m2
根据平行轴定理得天线对转轴的转动惯量为:
J=J1+me2=3.12+160×0.012=
3.136kg·m2
由上述条件得出天线的惯性力矩为:

c.摩擦力矩主要由轴承的滚动摩擦、齿轮传递的滑动摩擦构成,由于摩擦力矩非常小,可忽略不记。
d.干扰力矩M0主要是指冷却液管路、电缆的缠绕力矩。干扰力矩计为M0=5N·m
求三项和,即M=Me+Mβ+Mo=23.52+3.28+5=31.8N·m。
考虑到适当的余量,扫描器驱动力矩取M=35N·m。
驱动电机选用MaxonMotor公司的直流电机,主要技术指标如表1所示。
表1电机参数

型号输出功率/W额定电压/V额定转矩/(N·m)额定转速/(r/min)重量/g136204150240.1699290850
减速机选用GPL52(200∶1)型号,主要技术指标如表2所示。
表2减速机参数

级数减速比能承受转矩/(N·m)重量/g传递效率/%3级200∶13072585
考虑到低温启动时的所需力矩增大,需要对电机驱动力矩进行校核。
电机经过减速机构输出驱动力矩:
Mm=T·η·i·ii·ηi=
0.169×0.85×200×4×0.97=111.5N·m
T为电机额定输出扭矩;i为减速机减速比;η为减速机效率;ii为末级齿轮减速比;ηi为末级齿轮效率。
在低温环境(-55 ℃)下,减速机摩擦力矩大大增加,为使减速机在低温环境下能持续正常工作,电机力矩冗余系数应不小于3。由于n>3且Mmm>35N·m,故电机驱动力矩满足正常使用要求。
4扫描器传动精度分析
a.传动链回差。传动链回差主要由减速机回差和末级齿轮啮合间隙产生。
Δθ=Δθ减速机/ii+Δθ齿轮=9.75arcmin
Δθ为传动链总回差;Δθ减速机为减速机回差(为15arcmin);Δθ齿轮为末级齿轮回差(控制在6arcmin内)。b.轴扭转角度。轴在受到外部扭矩时,在承载范围内会发生弹性扭转变形。在本传动链中,主要有减速机输出轴和天线轴会有扭转变形。
Δφ=M总/(i末级·k减速机)+M总/k天线轴=
35/(4×1.4)+35/460=6.33arcmin
Δφ为轴扭转角度;M总为天线所受总扭矩;k减速机为减速机的扭转刚度;k天线轴为天线轴扭刚度;i末级为末级啮合齿轮减速比。则总传动精度为Δ=Δθ+Δφ=16.08arcmin。
5力学分析
机载设备对空间和重量的要求非常苛刻,为满足小型轻质的设计要求,扫描器的主要承力结构件使用的是高强度铝合金,并且由于机载环境非常的恶劣,因此有必要分析在模拟各种振动和过载环境下,扫描器的主承力件的应力分布情况。
力学仿真分析是采用整体建模的方式,重点分析扫描器前端轴和连接支架的应力分布。建模对象是天线框架、阵面、后盖板、扫描器承力件以及安装支架,材料为铝合金,见表3。
表3分析对象的材料参数

材料名称弹性模量/GPa泊松比密度/(t/mm3)热膨胀系数/K-1屈服极限/MPa强度极限/MPa5A06710.332.7×10-922.8×10-6155315
根据雷达结构的具体结构形式,天线框架、阵面、后盖板等采用壳单元模拟,扫描器承力件、安装支架等采用实体单元模拟,SAM采用壳单元和实体单元描述,阵面电源、数据分配器和组合电源等插件采用实体单元模拟,结构中其它非承力组件采用质量单元进行等效。整个有限元模型总重约为185 kg,其中天线单元160 kg,模型共有527 828个单元和380 107个节点。雷达的整体有限元模型如图3所示。

图3 雷达整体有限元模型
通过仿真分析可以看出,扫描器在受到上下方向4.5g过载时,如图4所示。除安装孔附近应力集中区域外整体应力水平在100 MPa以下,扫描器在受到上下方向随机振动时,如图5所示。整体应力水平在20 MPa以下,而安装孔附近应力则达到70 MPa。从仿真结果可以看出,各个安装孔是应力集中的区域。为增强安装孔的强度,有针对性的进行优化,如局部结构加强、增加插销螺套等。

图4 扫描器受到4.5g过载(上下方向)
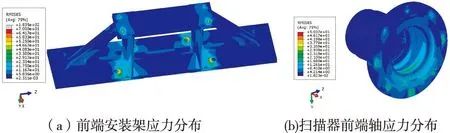
图5 扫描器受到上下方向随机振动
6结束语
针对机载合成孔径雷达复杂的工作环境,以及小包络空间和轻质化的要求,提出一体化弱刚性驱动系统,并对伺服平台结构设计进行了必要的分析和计算。系统工程样机通过了多次地面振动台试验以及低温(-55 ℃)试验,系统达到了设计指标要求,满足用户的使用要求。
参考文献:
[1]赵博,钱正祥,黄晓雷,等.无人机载SAR技术应用研究综述[J].电子信息职业技术学院学报,2009,8(1):24-25.
[2]吴凤高. 天线座结构设计[M].西安:西北电讯工程学院出版社,1986.
[3]洪长满,段勇军.机载雷达天线座结构的刚强度性能评估[J].现代雷达,2011,33(6):72-75.
[4]宋志国,陈志刚.某机载雷达天线背架结构设计[J].电子机械工程,2008(24):28-30.
[5]王志刚,王志海.某机载SAR天线支架的结构设计与分析[J].机械与电子,2011(6):16-18.
