基于超声波测距的二维倒车雷达系统设计
2016-01-26陆城富许宜申吴茂成
陆城富,许宜申,吴茂成
(苏州大学 物理与光电·能源学部,苏州 215006)
基于超声波测距的二维倒车雷达系统设计
陆城富,许宜申,吴茂成
(苏州大学 物理与光电·能源学部,苏州 215006)
摘要:针对现有一维倒车雷达系统无法探测地面路况的问题,设计了一款基于超声波测距的二维倒车雷达系统。两列超声波探头分别监测车后方水平障碍物和车后方地面障碍物,对系统的地面监测即超声波斜面测距给出了理论依据,若车后方有障碍物,则系统发出语音提示。实验测试结果表明,该系统可实现车距在水平方向3~400 cm 的准确测距,同时对地面出现的障碍物与凹坑有较高辨识能力,系统可靠性高。
关键词:超声波测距;斜面测距;二维雷达;语音报警
引言
近年来,随着经济的迅速发展,汽车作为便捷的交通工具已进入越来越多的家庭,同时,由泊车和倒车所引发的事故也越来越多。倒车时,车内、外的反光镜可以扩展驾驶员的视野,但是汽车后方的障碍物,以及由于高度不足,通过反光镜看不到的障碍物都可能处于驾驶员的视野死角中。据相关调查统计,15%的汽车碰撞事故都是由倒车时汽车的后视能力缺乏造成的[1]。
本文针对一维倒车雷达系统的主要缺陷,设计了一款基于超声波测距的二维倒车雷达系统。该系统可及时辨别汽车后方凸起、悬崖以及后方处于驾驶员盲区内的其他障碍物,同时所加入的智能语音报警功能,可及时提示驾驶员车后的具体情况。
1系统总体设计
本系统主要由STC89C52单片机、超声波水平测距模块、超声波地面监测模块、稳压电源模块、温度补偿、智能语音报警模块及液晶显示电路等组成,系统总体设计原理框图如图1所示。
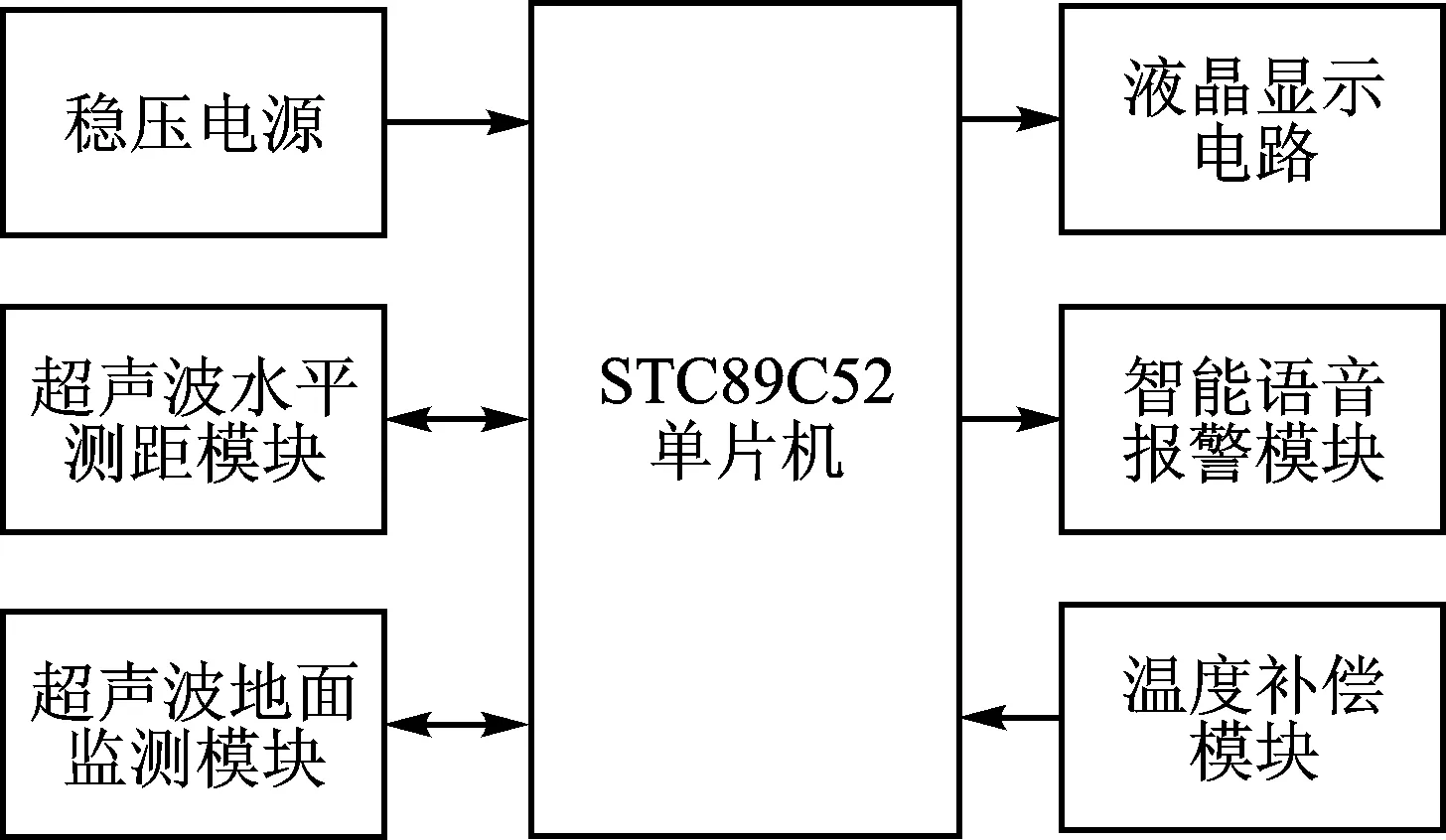
图1 系统总体设计原理框图
系统工作原理如下:汽车挂倒档,系统通电启动完成初始化。由于声速与温度有关,使用温度传感器测量现场温度,并送回单片机进行声速补偿。超声波水平测距模块从汽车尾部向水平方向发射超声波,超声波地面监测模块从汽车尾部方向发射超声波(安装角与水平面成60°)。超声波在空气中传播,遇到障碍物时会产生出回波,回波分别由超声波水平测距模块和超声波地面监测模块接收。回波经过前置放大、带通滤波、电压比较器后,由单片机检测回波到达的时刻,并计算超声波从发射到接收所使用的时间(即渡越时间),由此计算出车尾与障碍物的距离。距离实时显示在液晶显示屏上,并通过智能语音报警模块发出提示语音。
2主要硬件模块设计
2.1超声波水平测距模块设计
采用超声波收发一体测距模块HC-SR04完成测距任务,此模块包括超声波发射探头、接收探头、控制电路,能够实现3~400 cm距离测量。超声波发射探头发出的超声波频率为40 kHz,波束角为30°,探测范围为轴向±30°的弧状区域。
超声波水平测距时,3个超声波模块以等间距方式排列,每个超声波模块的TRIG和ECHO引脚分别与单片机I/O口相连。单片机依次给TRIG引脚一个大于10 μs的高电平,这样超声波测距模块就可以给发射探头8个40 kHz的周期电平,此时发射探头发出超声波。接收探头检测到回波后,ECHO引脚输出一个与超声波从发射到接收所用时间T相同的高电平[2],高电平时间T通过单片机内部定时器0加以采集。当单片机采用12 MHz的外部晶振时,每执行一个机器周期则需要1 μs,计数加1需要一个机器周期,所以通过定时器计算得到的时间T(单位s)为:
其中,T为超声波从发射到接收所用的时间,TH0与TL0分别表示单片机定时器0的高字节和低字节寄存器值。探头与障碍物间的距离S为:
系统运行时,超声波水平测距电路中的3个超声波测距模块依次发出超声波,间隔至少大于60 ms,以保证超声波回波不会相互影响。超声波水平测距模块工作图,如图2所示。
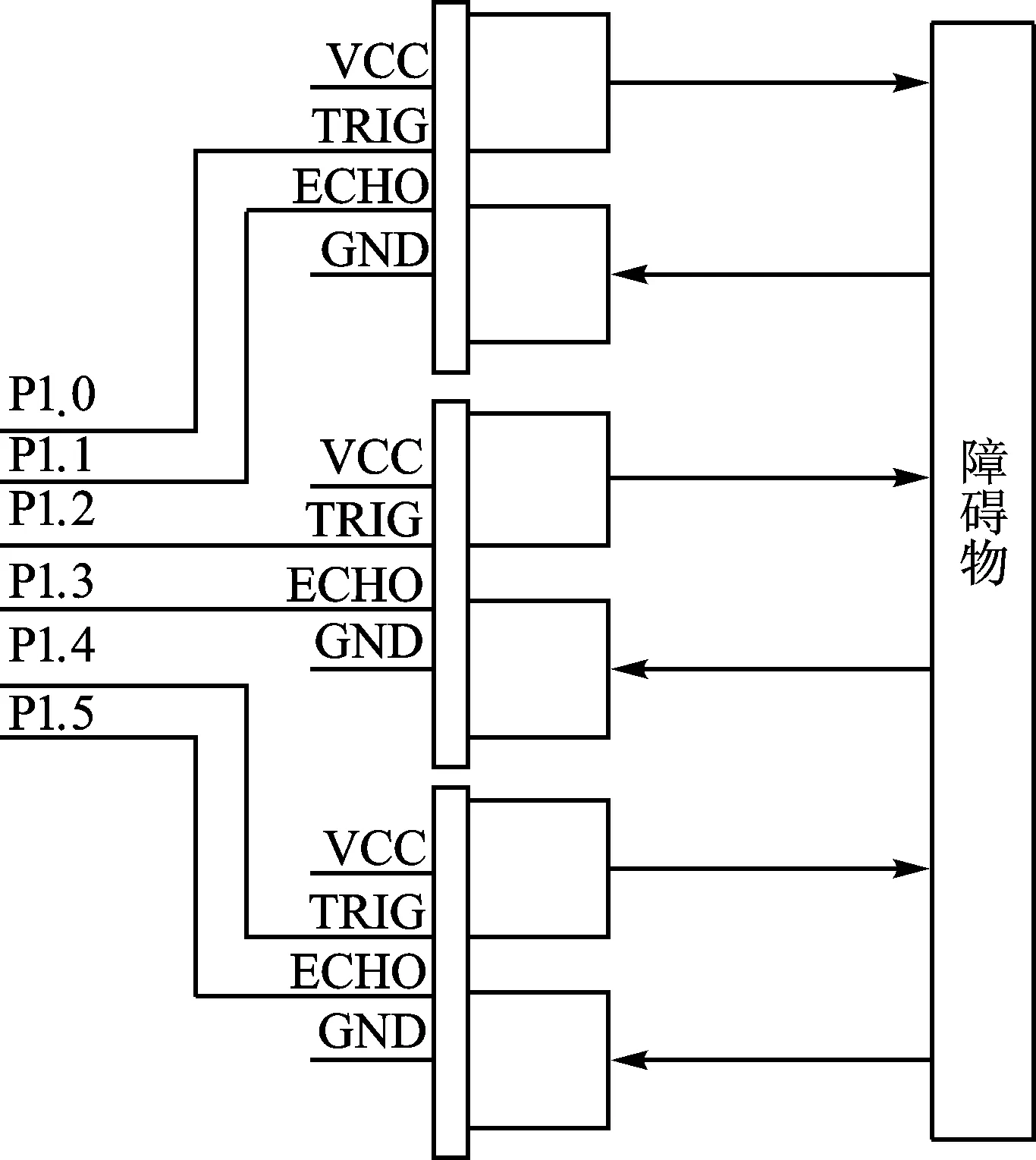
图2 超声波水平测距模块示意图
2.2超声波地面监测模块设计
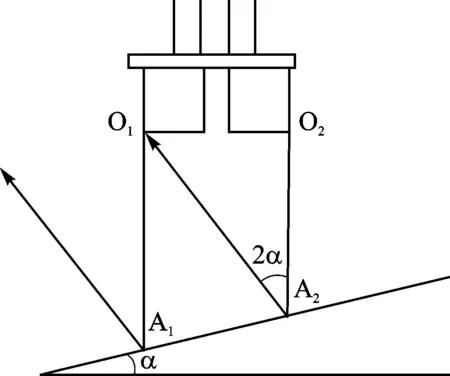
图3 反射波返回探头的极限情况示意图
超声波测距的关键是探头要接收到回波,探头发出的声波沿直线传播,遇到不同介质的界面会产生反射和散射现象。声波向斜面入射时,反射波会沿着反射角方向传播,可能并不指向探头。图3是反射波返回探头的极限情况。
该情况下,H为可测距离,α为界面倾角,接收发射探头距离之间的关系为[3]:

当界面倾角α为30°、O1O2为38 mm时,探头只能在H小于32.9 mm时才能接收到反射波,实际斜面测量距离远大于此距离,所以实际测量中反向散射波成为回波的主要成分。超声波测距时,对于具有一定倾斜角度的粗糙斜面,不计声传播衰减时的散射回波强度为[4]:
其中,Is为散射回波;W0为超声波探头发射功率;v为轴向集中系数,其与辐射面的形状有关,如为圆形辐射面,则v=π·d/λ;H为探头到斜面的垂直距离;Δθ为波束角;β为入射波倾角。
由式(5)可知:在探头发射功率、轴向集中系数以及波束角固定不变的情况下,散射回波强度与测量距离、入射波倾角有关。当β=60°时,散射回波能量较β=90°时的情况减少不多,依旧能够进行回波检测。
将3个超声波模块HC-SR04固定在系统尾部,与地面成60°夹角,在实际的汽车倒车系统中,此模块可以安装在车尾的合适处。探头安装侧视图和正视图如图4所示。
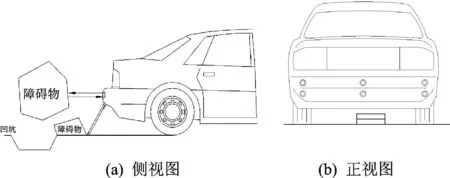
图4 探头安装示意图
2.3温度补偿模块设计
超声波在空气中以纵波方式传播,其传播速度受气体的密度、温度及气体分子成分的影响,其中温度对声速影响较大[5]。考虑温度对声波速度影响时,声波在空气中的传输速率为:
其中,V为声速,T为摄氏温度。
采用美国DALLAS公司数字温度传感器DS18B20实现对环境温度测量,根据测得的温度对声速进行校正,以减小环境温度对声速的影响。DS18B20所构成的温度补偿电路具有体积小、电路简单、测量精度高等优点,只需连接到单片机的一个I/O端口就能实现与单片机之间的双向通信,测温范围为-55~125 ℃,在-10~85 ℃温度范围内的精度可达±0.5 ℃。
2.4智能语音报警模块设计
采用NV020多功能语音芯片作为语音报警模块的核心元件。该芯片工作电压范围为2.7~3.6 V,内建16位D/A音频输出,自带内部滤波音频功放,可以直接驱动8 Ω/0.5 W的扬声器,具有高音质、低噪声的特点,可构成按键控制模式、一线串口连接以及三线串口连接3种工作方式。使用时,只需通过单片机寻址所存储的提示语音即可实现调用播放,发送不同命令码可实现音量调节、语音播放、暂停等功能。
3系统软件设计
系统软件设计以Keil C51为集成开发环境,采用C语言模块化方式进行系统应用程序编写,软件流程如图5所示。
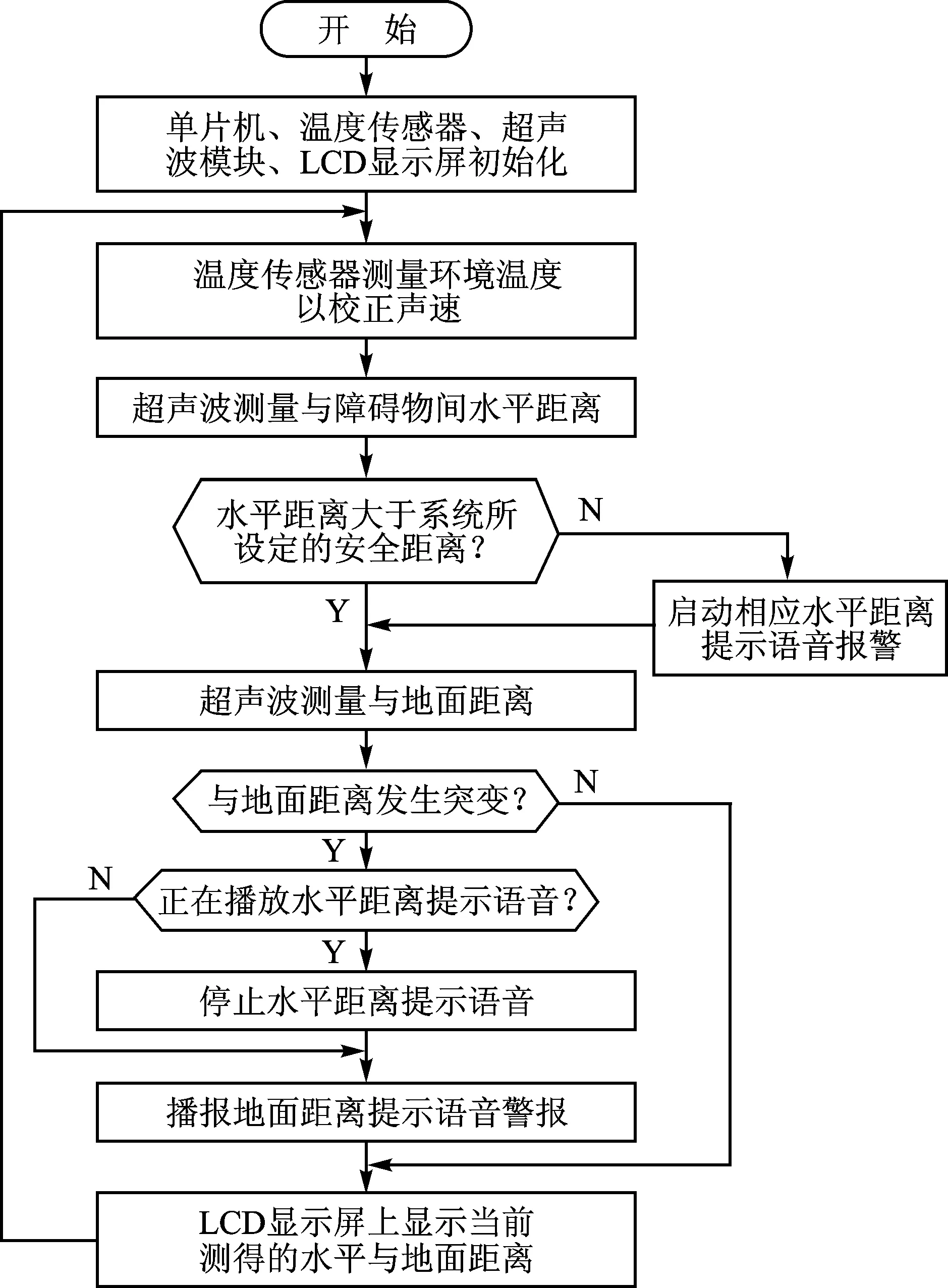
图5 系统软件设计流程图
汽车挂倒档时系统上电,首先完成单片机、超声波测距模块、数字温度传感器及LCD显示屏的初始化设置,如具体工作模式、显示方式等。然后,利用温度传感器对当前环境温度进行实时采集以实现声速校正。然后超声波水平测距模块检测与车后障碍物的水平距离,当检测到的水平距离小于系统所设定的安全距离时,立即启动水平距离提示语音,提醒驾驶人员立即停止继续倒车。
同时,超声波地面监测模块测量汽车尾部与地面成60°处的距离,并判断该距离是否发生突变。若检测到的地面距离发生突变,则判断语音报警模块是否正在播放水平距离提示报警语音,若符合判断,则立即停止水平提示报警语音的播放改为进行地面监测语音报警,否则直接进行地面监测语音报警。若没有发生突变,则不进行语音报警提示,而将所检测到的倒车时的水平与地面距离显示在LCD显示屏上,以便驾驶人员获取相关的实时数据,提高倒车的安全性。
4实验测试
系统性能实验测试,包括水平测距与地面监测两大部分。系统水平测距的实验数据如表1所列。其中,实际值为卷尺所测量的超声波探头与墙壁之间的距离,测量值为所设计系统中的LCD显示值。由表1可知,系统可在3~400 cm实现水平距离准确测量测距,最大误差仅为1.10%,满足倒车需求。同时,经过多次测试发现,系统均可及时监测出所设定的10 cm以上的凸起及凹坑,并给出相应提示语音警报,系统工作稳定可靠。

结语
通过斜面测距理论分析以及相关实验可知,地面监测模块方向与地面夹角为60°时,满足系统的精准性和实时性要求。

参考文献
[1] 朱利娜.基于单片机的超声测距倒车雷达的研究[J].微计算机信息, 2007, 23(8-2):110-111.
[2] 李军,申俊泽.超声测距模块HC-SR04的超声波测距仪设计[J].单片机与嵌入式系统应用, 2011(10): 77-78.
[3] 黄天戌.超声斜面测距的理论及试验研究[J].武汉水利电力学院学报, 1988 (6):41-49.
[4] 高克成.超声测量物位中的一些声学问题[J].自动化仪表, 1998(11): 9-13.
[5] 王红云.基于超声波测距的倒车雷达系统设计[J].国外电子元器件, 2008(8): 69-70.
(责任编辑:杨迪娜收修改稿日期:2015-05-11)
Two-dimensional Reversing Radar System Based on Ultrasonic Ranging
Lu Chengfu,Xu Yishen,Wu Maocheng
(College of Physics,Optoelectronics and Energy,Soochow University,Suzhou 215006,China)
Abstract:In view of the problem of the ground obstacles can’t be detected by the existing one-dimensional reversing radar system,a two-dimensional reversing radar system based on ultrasonic ranging is designed.The level obstacles and the ground obstacles in the rear of the car are detected by two columns of ultrasonic probe.The theory of ground monitoring or inclined plane distance measuring is given in the paper.Voice prompt is given when obstacles appear.The experimental results show that the measured data is between 3~400 cm and the obstacles and pits on the ground could be detected with a high identification.
Key words:ultrasonic ranging;inclined plane distance measuring;two-dimensional radar;voice alarm
中图分类号:TB559
文献标识码:A
