地铁隧道自动化监测精度分析
2016-01-26吴灿鑫,胡雷鸣,付和宽
地铁隧道自动化监测精度分析
吴灿鑫,胡雷鸣,付和宽
(上海岩土工程勘察设计研究院有限公司,上海 200032)
一、引言
地铁保护区因其特殊性,通常人工测量在测量精度、监测频率等方面无法满足地铁隧道实时监测的要求。高精度的测量机器人可实现24 h的自动化监测,受地铁运营影响较小,在地铁隧道保护区监测中得到广泛应用。本文以杭州地铁1号线某隧道保护区监测为例,介绍了由Leica TM30全站仪组成的自动化监测系统,对该系统的精度及可靠性进行了探讨。
二、自动化监测系统
为实时监控临近基坑对地铁隧道的影响,本工程采用Leica TM30测量机器人进行自动化监测,配合L型小棱镜测量隧道的水平位移、收敛变形和沉降。数据处理采用Leica配套的GeoMoS软件,包含Monitor监测器和Analyzer分析器两个模块。
在192 m的监测范围内上、下行线各布设监测断面25个,距离仪器最远约112 m。每个断面分别在两腰和道床上布设3个监测点,如图1所示。
由于隧道本身并非直线敷设,因此选择将全站
仪安置于测区中间位置,在远离测区范围的管壁上布设控制点,通过后方交会计算仪器坐标和方位。根据仪器坐标及稳定的后视点,采用极坐标法测量各监测点的三维坐标,计算其水平位移、沉降及收敛变形(如图2所示)。

图2 现场布点照片
三、测量精度分析
本工程采用高精度的Leica TM30测量机器人,测角精度达0.5″,测距精度0.6 mm+1×10-6×D。从测量角度讲,在条件允许的情况下,仪器精度完全可满足120 m范围内的自动化监测需求。为验证自动化监测系统的精度与可靠性,避免基坑开挖扰动及开挖后土体徐变的影响,选取基坑施工前比较稳定的监测数据进行分析,从仪器设站点的精度、折光影响、列车运行影响等方面进行探讨。
1. 全站仪后方交会的精度
限于地铁隧道空间狭窄的特点,控制网网形较差。为比较后视控制点对仪器设站点的精度影响,在原有控制点附近增加5个后视点,且尽量沿隧道圆形方向均匀分布,如图3所示。

图3
比较加密控制点前后的仪器设站点坐标在不同时段的改正量,如图4、图5所示。
从图4、图5可以看出,增加5个控制点后,后方交会计算仪器设站点的坐标精度有明显提高。合理布设后视控制点,且尽量沿隧道圆形方向均匀敷设,可有效提高控制网的可靠性。
2. 不考虑管壁折光时的测量精度
根据地铁隧道特点,布设于全站仪对侧管壁的监测点通常不受管壁折光的影响。统计本工程对侧管片点和隧道中央道床沉降点测量精度如图6所示。
由图6可以看出,横向坐标和高程精度相当,基本都在0.5 mm以内,可满足监测要求。
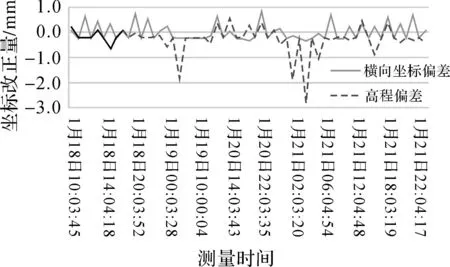
图4 加密控制点前仪器后方交会坐标改正量
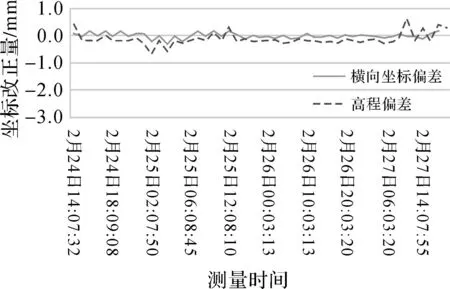
图5 加密控制点后仪器后方交会坐标改正量

图6 对侧管片测点测量误差
3. 列车运行的影响
地铁列车在测区范围内运行时,由于视线遮挡及振动无法进行观测。为分析列车振动后对整个监测系统的影响,分别统计运营期间和非运营期间所有测点中误差的算数平均值,结果见表1。

表1 mm
从表1可以看出,运营期间列车的振动对测量精度影响较小,采用固定仪器台及钻孔埋设的方式可有效提高自动化监测系统的稳定性与可靠性。另外,列车的长期高频率振动势必对仪器产生影响,因此须定期进行检查校准。
4. 管壁旁折光的影响
统计本工程25个监测断面,计算仪器对侧、同测、道床面的不同测点精度。
与仪器同侧且相距较远的测点易受管壁旁折光的影响,可能造成测量数据的失真。因此,在测点布设时须充分考虑管壁折光的影响,检查数据的可用性,对受折光影响的测点需重新布设。
四、监测成果分析
本工程对受折光影响的测点重新布点,并人工测量沉降测点及水平收敛测点,以验证和检查自动化监测系统的可靠性。比较自动化监测数据与人工测量成果,如图7、图8所示。

图7 管片累计收敛量对比

图8 道床累计沉降量对比
由图7、图8可以看出,临近的基坑施工造成地铁隧道向基坑一侧的水平位移、沉降和隧道直径的增大,自动化监测数据和人工监测数据基本吻合,进一步验证了监测系统的可靠性。
五、结论
总结本工程各项监测成果,可以得出以下结论:
1) 高精度的测量机器人是隧道自动化监测精度的保证,在复杂条件下仪器的可靠性对测量精度至关重要,从项目运营效果看,Leica TM30 0.5″仪器完全可以达到要求。
2) 地铁隧道空间狭小,控制网的布设难度较大,采用后方交会法布设时,可尽量均匀布设足够多的后视控制点,以提高相对精度。
3) 自动化监测受隧道管壁折光、空气粉尘影响较大,布设监测点时须避免出现“多棱镜”的情况,应充分考虑仪器与监测点的相对位置,提高测量可视角度。
4) 自动化监测系统受外界影响因素较多,定期检查与人工监测可有效提高监测的可靠性。
(本专栏由徕卡测量系统和本刊编辑部共同主办)
天宝测绘解决方案专栏
