基于最优尺度的高分辨率遥感影像道路提取
2016-01-26张采芳郑毓勇
张采芳,田 岩,郑毓勇
(1. 文华学院,湖北 武汉 430074; 2. 华中科技大学电子与信息工程系,湖北 武汉 430074)
Road Extraction from High-resolution Remote Sensing Image
Based on Optimal Scale
ZHANG Caifang, TIAN Yan, ZHENG Yuyong
基于最优尺度的高分辨率遥感影像道路提取
张采芳1,田岩2,郑毓勇2
(1. 文华学院,湖北 武汉 430074; 2. 华中科技大学电子与信息工程系,湖北 武汉 430074)
Road Extraction from High-resolution Remote Sensing Image
Based on Optimal Scale
ZHANG Caifang, TIAN Yan, ZHENG Yuyong
摘要:遥感影像道路提取一直是遥感应用的重点研究方向之一。传统的基于像素级的道路提取方法侧重于考虑影像的像素信息,并没有考虑到地物目标之间的空间依赖性。本文针对高分辨率遥感影像,提出了一种新的面向对象的道路提取方法,其基本思想是利用道路的多尺度特性,将不同尺度的道路提取结果进行集成,得到最终的道路提取结果。方法的主要过程是首先建立不同的图像尺度层,根据道路对象内部的同质性和道路与背景间的异质性给出道路提取的最优尺度层;其次,在道路的最优尺度上提取道路的主干道;最后依次在各小尺度层上通过道路生长的方法实现道路的完整提取。试验结果表明本文所提方法能明显提高道路的提取精度。
关键词:面向对象;高分辨率影像;道路提取
一、 引言
道路的自动识别和提取对影像理解、地理信息系统数据库更新、城市规划等都有重要的理论和现实意义。在快速发展的高分辨率遥感技术的推动下,利用高分辨率遥感影像提取道路的研究得到了广泛的关注。
目前国内外的学者已经对道路提取算法进行了大量的研究,如Snake模型[1-4]、水平集方法[5]、动态规划法[6]、模板匹配法[7]、面向对象法[8]等。文献[9]利用边缘信息与颜色信息将影像分成很多小图斑,然后根据相应的准则将之合并形成道路条带。文献[10]基于全色波段与多光谱波段的融合,采用K-均值法分割出面状道路,并结合道路边缘和形状特性提取道路。文献[11]首先对影像进行分割获取影像对象;其次利用影像对象的光谱特征、几何特征和空间关系建立道路知识库;最后利用知识库中的规则来提取影像中的道路。上述方法虽然能提取出道路信息,但是对于图像中多种道路并存的情况其提取结果并不太理想。
高分辨率影像中的道路存在以下两个特征:①不存在遮挡的各路面点的光谱较为相近,这为道路提取的完整性提供了可能,但同时与道路光谱相似的点会误判为道路(如建筑屋顶等);同时高分影像的道路面存在由斑马线、汽车、行人等造成的与道路光谱差异较大的噪声点,这又破坏了路面的完整性。②由于道路具有通达性、连续性和良好的规则性,因此高分影像上的道路也具有连续性,但是由于车辆、天桥和路边树木等遮挡物,又给图像上道路的连续性带来了影响。本文针对高分辨率影像的特点,基于面向对象的思想,融合最优层和其他各层的提取,提出一种面向对象的新型道路提取方法。
二、 基于多层融合的面向对象道路提取
图像对象是指图像分割后若干同质像素的集合。高分辨率影像为图像对象的形成提供了数据上保证。考虑到实际情形中,不同材质、不同几何形态的多种道路会同时存在,因此本文在基于面向对象分割的基础上,提出了一种新的面向对象的道路提取方法。算法的基本思想是,首先在道路的最优尺度上提取主干道;然后依次在各个小尺度层上通过道路生长的方法提取出完整的道路。本文提出的面向对象的道路提取流程如图1所示。
按照图1所示,本文提出的道路提取方法包含如下步骤:①多尺度对象层构造;②最优尺度层的道路对象提取;③ 按照从最优尺度层逐次向下各层提取道路。
1. 多尺度对象层构造
面向对象多尺度分割的工作流程是需要对遥感影像数据进行分水岭分割,产生最初的对象,此时,图像的最小组成单元已经不再是像素,而是一个个具有实际意义的同质性很高的小区域,要对这个小对象进行合并,必须建立起这些小对象之间的邻域关系。领域关系的建立是利用RAG来完成的,将原来的以像素为基本单元的图像转换成以对象为基本单元的结构,如图2所示。
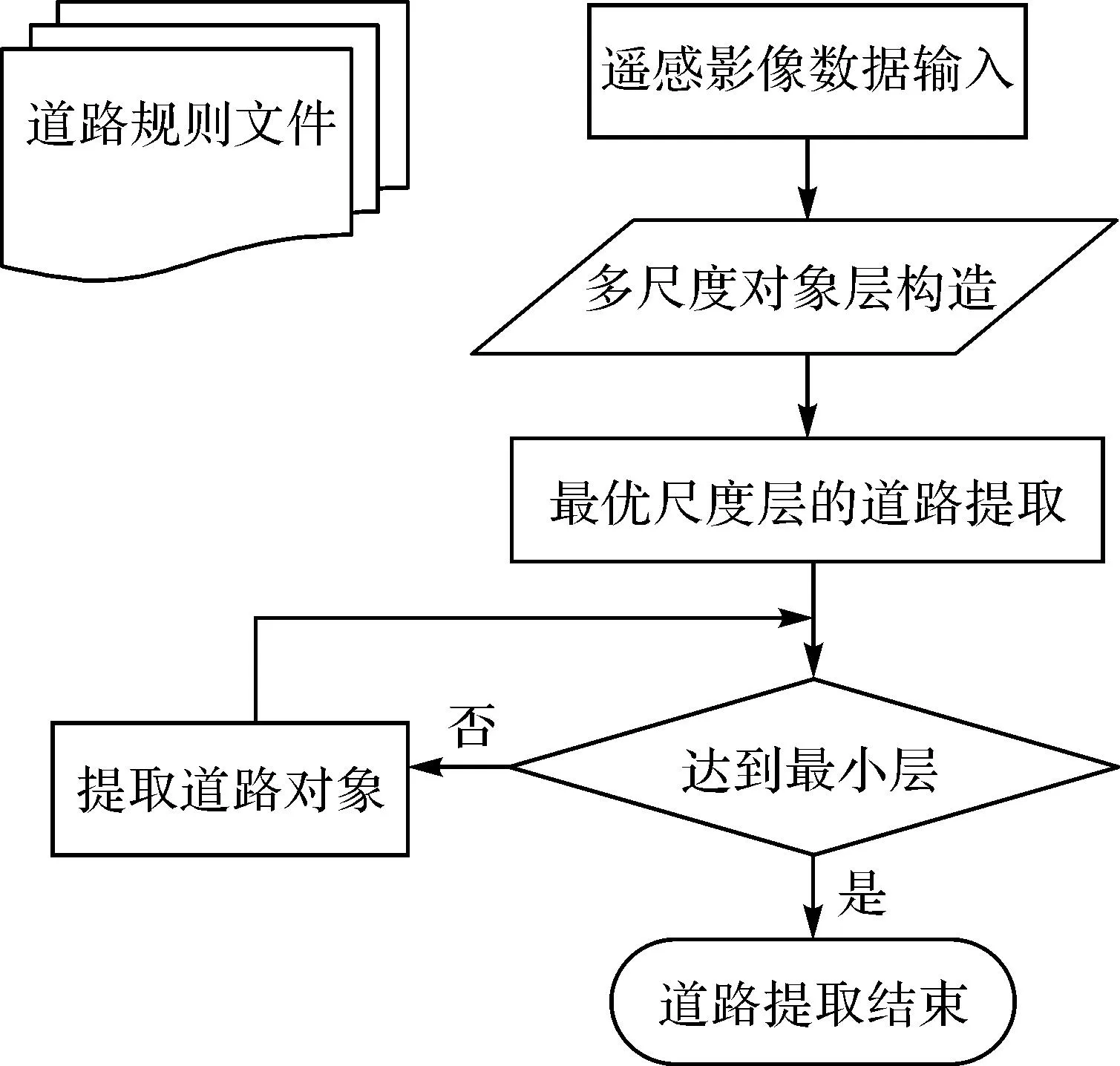
图1 融合多层的面向对象道路提取方法

图2 分割图像及其对应的区域邻接图
从小尺度向大尺度合并的过程中,当两个对象之间的异质性值满足合并条件时,就将这两个对象进行合并,在底层上连接这两个对象的弧也消失。在合并对象的同时需要更新对象和对象之间的邻区关系和异质性值。
两个对象之间的异质性具体计算方法为
h=wcolor×hcolor+wshape×hshape
(1)
其中
wcolor=1-wshape
(2)
wshape=wsmooth+wcompact
(3)
wsmooth=(1-compact)×wshape
(4)
wcompact=compact×wshape
(5)
而光谱同质性、形光滑度和紧凑度的计算方法为

(6)
式中,C为波段标记;wc为该波段的权值;nobj_1、nobj_2、nmerge分别表示待合并的两个对象的像素个数和合并后对象的像素个数;σobj_1、σobj_2、σmerge分别为合并前两个对象的方差和合并后整体的方差。这样,两个对象的异质性值的计算表达式可以改写为
hshape=wcompact×hcompact+wsmooth×hsmooth
(7)
(8)
(9)
式中,lobj_i(i=1,2)分别表示两个合并前对象的周长;lmerge表示两个对象合并成一个新对象后的周长;bobj_i(i=1,2)分别表示合并前两个对象的外包矩形周长;bmerge表示合并成一个大的对象后的外包矩形周长;nobj_i(i=1,2)分别表示两个待合并对象的面积(即对象的个数和空间分辨率的乘积);nmerge表示将两个对象合并成一个新对象后的面积。
将某一个待合并层的所有对象按照同质性高低进行排序,并且依次将每个对象作为种子点,在该对象的邻区中寻找一个最佳的合并对象;找到待合并对象后,如果这个对象还没有合并,就将两个对象合起来,更新两个对象间的异质性,将两个对象合并起来之后的新对象作为种子点,在新对象的邻区中继续寻找最佳的合并对象,直到两个相邻对象的异质性最小仍然大于合并尺度时,合并过程停止。继续下一种子点进行合并,直至所有种子点都被处理完毕。
经过上面的系列合并之后,在预先设定的尺度层上,就会形成该尺度下由所有对象组成的链表。从纵向角度观察,最后会形成一个金字塔形状的对象层体系,最下面一层是分水岭分割的结果(尺度为0),每一层的对象都是在下层的对象基础上合并形成的。
2. 最优尺度层上的道路提取
所谓道路的最优尺度层,是指在该层上的每个道路对象具备均一性,同时还要求道路对象与其相邻对象差异最大。在道路提取的初始阶段,对最优层上的所有对象逐一判断,利用道路规则将道路对象和非道路对象进行标识。图像多尺度分割的特性是尺度越大,道路的形状特性越好,在该层上的主干道路越容易被提取出来;但同时一些小的或规则性不强的道路对象会被遗漏掉。因此如何判断最优尺度成为该步骤的一个关键问题。以下给出最优尺度的提取过程:
1) 通过分水岭分割[12],将图像分成许多小面斑,即形成图像对象。
2) 将小尺度面斑逐步合成大尺度面斑,形成多尺度面斑。
3) 在每个尺度上,计算道路对象和其他类别对象间的差异以及道路对象内部的差异,当前者最大,后者最小时对应的图层即为最优层。
图3给出了最优层上的道路提取过程。

图3 最优层上的道路提取流程图
对于道路提取算法,本文采取Adaboost学习方法,训练过程描述如下:
1) 为每类地物选择一系列的训练样本(x1,y1)、(x2,y2)、…、(xn,yn),其中yi=0表示正样本(即该类地物的样本);yi=1表示负样本;n为样本集中的样本总数。

式中,m+l=n。
3) 设置迭代次数T,每次迭代,从特征库中选择一个最好的弱分类器,每次迭代过程如下:
a. 对所有的样本权重进行求和并作归一化处理
b. 对于使用的特征库中的所有特征fj(j=1,2,…,K,特征数量为K),都可以找到一个错误率最小的特征h(x,fj,p,θ),并利用计算出的所有特征对样本进行分类,计算出每种分类情况下加权错误率εt
c. 选取加权错误率最小的那个特征t,错误率越小说明在这次循环中,该特征越能更好地将不同地物分开,在εfj(j=1,2,…,K)中选取错误率εt最小对应的特征
d. 获取最佳的弱分类器,调整整个样本空间的权重
式中,ei=0表示样本xi分类正确;ei=1表示样本xi分类错误,即将错误的样本权重通过某种方式进行提高,同时在此次分类中被正确识别的样本权重保持不变
4) 当所有的T次迭代完成后,就能得到该类地物的一个强分类器
上述过程中,t为第t次迭代选出特征的权重;T为迭代次数,由用户自己设置,同时也是整个训练过程中所选择出的特征数目。
3. 最优层以下尺度层上的道路提取
在最优尺度上,道路网中的主干道大部分能被提取出来,此时由于对象的形状特性较为明显,因此虚检情况较少。考虑到部分道路会被漏检,因此可以从下一层上继续提取,最后将各层提取的道路合并,以得到最终的道路提取结果。
在此过程中,为了避免道路对象提取过程中出现大量孤立的道路,仅对下一层上已识别的道路邻区进行判断。其过程是:取小尺度下的对象,判断该对象是否已被标识为道路,如果没有被识别为道路,就判断下一个对象;若已被识别为道路,则遍历这个道路对象的邻区,找到最佳的一个邻区,最后判断这个邻区是否满足该层下的道路特征。图4为最优层以下的各图层道路提取流程。
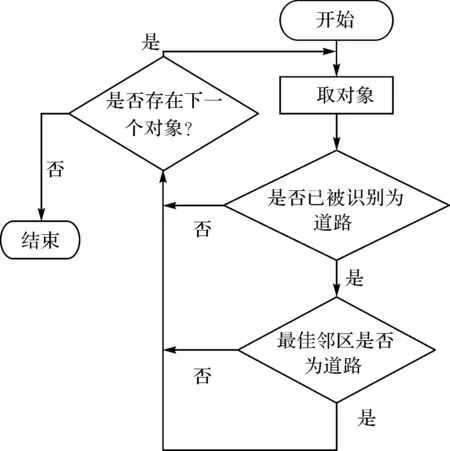
图4 最优层以下的尺度层上的道路提取
按照上述方法,以当前层下的道路对象进行生长,当道路对象的邻区被识别为道路后,继续判断这个邻区的邻区中是否存在道路。在图4的流程中,每次仅判断道路对象的邻区是否为道路,而对邻区的邻区是否为道路对象则不进行处理,即每次只生长一次。
为了实现道路对象的不断生长,在上面道路提取的基础上,判断每一循环所有对象中被识别为对象的个数,如果被识别出的道路对象为0,说明该层下的所有对象均已被识别;如果识别的对象数目不为0,则下一次循环需要以这些对象为种子继续生长。
三、试验结果及分析
为了测试本文所提方法的有效性,本节选择GeoEye-1卫星遥感数据进行试验,该数据可以在该卫星公司的网站上下载。按照道路类型应该尽量多和背景复杂的原则,选取澳大利亚霍巴特地区,该场景除了包含道路外,还包含了其他一些常见的地物类型,如房屋、裸地、草地、林地、水域等。该数据的其他相关信息详细说明如下:
1) 影像数据来源:GeoEye-1卫星,空间分辨率为2 m;
2) 影像获取时间:2011年10月;
3) 影像规格:778像素×801像素;
4) 影像数据量:4.79 MB;
5) 波段信息:450~510 nm (蓝色波段)、510~580 nm (绿色波段)、655~690 nm(红色波段)、780~920 nm (近红外波段);
6) 中心经纬度:42°.882 377 7(南纬),147°.323 474 9(东经)。
该测试图及相应的参考图如图5所示,其中图5(b)中的白色曲线即为道路参考图。

图5 测试区域RGB真彩色图及道路参考图
利用本文所提出的方法对图5(a)进行道路提取的结果如图6(a)所示,图6(b)为传统的单一层上的道路提取结果。对比图5(b)和图6(a)可以看出,本文方法能够将几乎所有的道路提取出来,道路的连通性和完整性表现较好。对比图6(a)和图6(b)则可看出,传统的单一尺度的方法存在大量的杂乱点,同时道路的完整性较差。经统计,本文方法的正确率为96.1%,漏检率为1.4%,虚检率为3.5%;而单一尺度的正确率为92.3%,漏检率为5%,虚检率为6.4%,上述定量指标验证了本文方法的有效性。
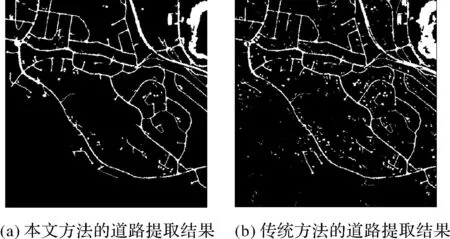
图6 面向对象的道路提取结果
四、 结束语
本文针对高分辨率图像的道路提取提出了一种以最优层为主,更小尺度层为辅的方法。主要意义在于:①面向道路目标提取,研究了一种多尺度图层构建方法,并给出了最优图层的提取方法;②为了完整的提取道路,将图像最优层和其他更低层相结合以达到道路提取完整性的目的。GeoEye-1遥感影像试验的结果表明,本文所提出的方法具有良好的性能表现。
参考文献:
[1]MAYER H,LAPTEV I, BAUMGARTNER A,et al.Automatic Road Extraction Based Multi-scale Modeling,Context,and Snakes[J].International Archives of Photogrammetry and Remote Sensing,1997(30):106-113.
[2]TANG Wei,ZHAO Shuhe.Road Extraction in Quaternion Space from High Spatial Resolution Remote Sensed Images Basing on GVF Snake Model[J].Journal of Remote Sensing,2011,15(5):1040-1052.
[3]GRUEN A, LI H. Semi-automatic Linear Feature Extraction by Dynamic Programming and LSB-Snakes[J].Photogrammetric Engineering and Remote Sensing. 1997,63(8):985-995.
[4]Gruen A, Adaptive Least Squares Correlation——A Powerful Image Matching Technique [J]. South African Journal of Photogrammetry, Remote Sensing and Cartography,1985,14(3):175-187.
[5]LU Bibo,KU Yongxia,WANG Hui.Automatic Road Extraction Method Based on Level Set an Shape Analysis[C]∥lntelligent Computation Technology and Automation,Second International Conference. Changsha:[s.n.],2009:500-514.
[6]POZ A,VALE G.Dynamic Programming Approach for Semi-automated Road Extraction from Medium and High Resolution Images[J].International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences,2003,34(8):87-91.
[7]LIN Xiangguo,ZHANG Jixian,ZHENG Jun,et al.Semiautomatic Road Tracking by Template Matching and Distance Transform[C]∥Urban Remote Sensing Event.Shanghai:[s.n.],2009:l-7.
[8]胡进刚,张晓东,沈欣,等. 一种面向对象的高分辨率影像道路提取方法[J]. 遥感技术与应用,2006,21(3):184-188.
[9]GROTE A,BUTENUTH M,HEIPKE C. Road Extraction in Suburban Aeas Based on Normalized Cuts[C]∥International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences.Munich:[s.n.],2007:51-56.
[10]李晓峰,张树清,韩富伟,等.基于多重信息融合的高分辨率遥感影像道路信息提取[J].测绘学报,2008,37(2):178-184.
[11]朱晓铃,邬群勇.基于高分辨率遥感影像的城市道路提取方法研究[J].资源环境与工程,2009,23(3):296-299.
引文格式: 张采芳,田岩,郑毓勇. 基于最优尺度的高分辨率遥感影像道路提取[J].测绘通报,2015(1):90-94.DOI:10.13474/j.cnki.11-2246.2015.0018
作者简介:张采芳(1975—),女,硕士,讲师,研究方向为图像处理、模式识别。E-mail:316651876@qq.com
基金项目:湖北省高等学校优秀中青年科技创新团队计划(T201431);地理空间信息工程国家测绘地理信息局重点实验室开放研究基金(201110)
收稿日期:2014-07-31
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2015)01-0090-05
