基于高分辨率遥感影像的面向对象水体提取方法研究
2016-01-26殷亚秋李家国杨红艳张永红
殷亚秋,李家国,余 涛,杨红艳,张永红
(中国科学院遥感与数据地球研究所,北京 100101)
The Study of Object-oriented Water Body Extraction Method
Based on High Resolution RS Image
YIN Yaqiu,LI Jiaguo,YU Tao,YANG Hongyan,ZHANG Yonghong
基于高分辨率遥感影像的面向对象水体提取方法研究
殷亚秋,李家国,余涛,杨红艳,张永红
(中国科学院遥感与数据地球研究所,北京 100101)
The Study of Object-oriented Water Body Extraction Method
Based on High Resolution RS Image
YIN Yaqiu,LI Jiaguo,YU Tao,YANG Hongyan,ZHANG Yonghong
摘要:根据高分辨率遥感影像的特点,利用面向对象的方法对高分辨率遥感影像进行了水体提取。选取最优分割尺度和分割参数对试验区进行了分割;建立了对象知识库;选择合适的阈值参数进行了水体的提取和河流、湖泊的分类;把面向对象方法分类结果与传统方法分类结果进行了对比分析。试验表明,面向对象水体提取方法具有更高的精度,不仅有效地区分了水体和阴影,而且很大程度上抑制了“椒盐现象”。
关键词:遥感;水体提取;面向对象方法;SPOT 5影像
一、引言
近年来,随着遥感技术的飞速发展,高分辨率遥感影像的应用越来越普及。如何利用高分辨率遥感影像进行水体的提取,近年来得到了广泛的研究。
刘建波等利用密度分割法从TM影像中提取水体的分布范围[1]。陆家驹等分别用阈值法、色度判别法、比率测算法从TM资料中识别水体[2]。通过识别结果的比较认为,阈值法的单红外波段识别水体简便迅速,但只能满足4000 m2以上水体的要求,色度判别法优于红外单波段,比率测算法不但能识别其他方法无法识别的小水体,还能对大水体的形状有所改进。Barton I J等利用AVHRR通道4提取的亮度温度来识别水体并对洪水进行了昼夜监测[3]。周成虎、杜云艳等提出了基于水体光谱知识的AVHRR影像水体自动提取识别的水体描述模型,并将该模型应用于太湖、淮河、渤海等地区[4-5]。以上方法均对于平原地区有效,但对于山区却存在弊端。
在山区和建筑物高大的城市,由于水体和阴影的光谱特征相似,因此在提取水体的同时容易将阴影也提取出来。杨存建等发现在Landsat TM影像中,只有水体具有波段2加波段3大于波段4加波段5的特征,利用此原理可以将水体单一提取出来[6]。徐涵秋在对传统归一化差异水体指数(NDWI)分析的基础上,提出了改进的归一化差异水体指数(MNDWI),使用该方法可以区分水体与居民地阴影,很好地提取了城市中的水体信息[7]。而这些都只是运用了影像的光谱信息,而未利用高分辨率遥感影像丰富的空间信息,从而造成了影像资源的浪费。
本文采用面向对象方法,利用eCognition软件对影像进行水体提取,把影像分割成不同的对象,充分利用影像的光谱信息和空间结构信息,在对象层次上进行水体的提取与分类。通过与传统的方法进行对比,表明了面向对象水体提取方法的优越性。
二、试验区数据
本文采用的试验数据是武汉市2001年的SPOT 5影像数据。SPOT 5卫星于2002 年5月4日发射,是SPOT卫星的第五颗卫星,空间分辨率为2.5 m。由于它具有较高的分辨率和立体观测的性能,且在环境监测、资源调查和国土整治等方面有广泛应用,因此,对SPOT 5影像进行信息提取研究具有重要的现实意义。
SPOT 5卫星包括4个波段,分别为近红外0.78~0.89 μm、红色0.61~0.68 μm、绿色0.50~0.59 μm、中红外1.58~1.75 μm以及全色0.41~0.78 μm,其中多光谱影像(包括绿色、红色、近红外波段)的空间分辨率为10 m,全色影像的空间分辨率为2.5 m。
试验区内绝大部分地区为平原,只有在影像的中部偏东侧区域有少许的山地。区域内有狭长的河流、较大的湖泊和较小的湖泊,分别为位于影像西部区域的长江及其支流和中部区域的东湖,东部区域的严西湖。除此之外还有一些较小的湖泊,如沙湖、南湖、墨水湖等。在影像的长江沿岸附近区域是居民地,有高大的建筑物。
三、研究方法
本文采用面向对象的方法对研究区域进行试验,与传统最近距离、最大似然、马氏距离分类法对比。具体内容如下:
1) 对试验区的水体对象进行分析研究,寻找最佳的影像分割参数,运用eCognition软件对影像进行多尺度分割。
2) 根据各种地物的光谱特征、空间形状、纹理、上下文关系等因素,对水体进行提取,重点研究水体和阴影的区分。
3) 寻找参数因子对提取的水体进行分类。
4) 将面向对象的水体提取方法与传统的方法进行对比,从而得出结论。
技术路线如图1所示。
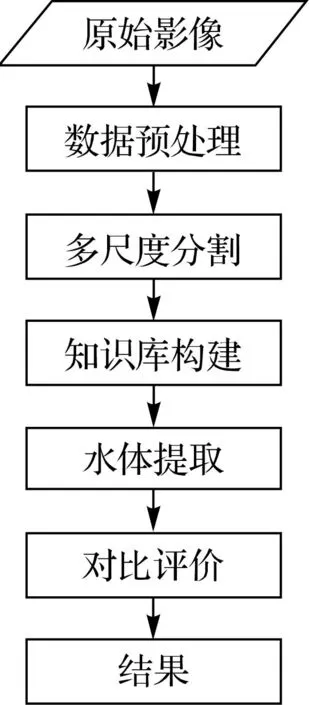
图1 水体提取流程
四、面向对象水体提取
首先利用ENVI软件对影像进行融合,然后利用eCognition软件对影像进行分割得到同质对象,对水体特征进行分析建立水体提取知识库,采用模糊分类方法实现水体的提取。
1. 数据预处理
全色图像一般具有较高的空间分辨率,多光谱图像光谱信息比较丰富,为了得到既具有较高的空间分辨率又具有丰富的光谱信息的图像,就需要把SPOT 5的多光谱影像和全色影像进行融合。
ENVI软件中的融合算法有很多,典型的有HSV、Brovey、PC、CN、SFIM、Gram-Schmidt等。这几种方法中SFIM和Gram-Schmidt方法保真效果最好。在ENVI里面,Gram-Schmidt方法可以自动融合,操作比较简单。它首先从低分辨率的波谱段中模拟出一个全色波段;然后对该全色波段和各多光谱波段进行Gram-Schmidt变换,其中全色波段被作为第一个波段,用Gram-Schmidt变换后的第一个波段替换高分辨率全色波段;最后再用Gram-Schmidt反变换得到融合的影像[8]。
融合后的研究区域影像如图2所示,融合后的影像色彩鲜明,影像清晰。

图2 预处理影像
2. 影像分割
在利用面向对象的图像分类方法进行分类前,必须利用图像分割的方法提取目标对象。图像分割是将图像分割为分离区域的过程, 它将图像划分为一个个大小不等且互不相交的小区域, 小区域是具有某些共同属性像素的连通集合[9]。
影像分割中确定最优尺度和分割参数是关键,这直接决定着分类的精度。最优尺度的选择主要依赖于影像数据的分辨率和应用目的,通过对试验区分割结果的对比确定水体提取的最优尺度。
对试验区进行分割试验,把分割尺度设置为50、100、150、200、250、300,颜色因子、形状因子、光滑度、紧密度的权重分别设为0.9、0.1、0.5、0.5。由于研究区域内水体有不同尺度的类型,因此在寻找分割尺度时就要采取折中方法,既要保障小的水体能独立地分割出来,又要尽可能地使大的水体对象不会太破碎,经过反复试验得出试验区域水体提取的最适宜分割尺度为100。图3为分割尺度100的效果,图4为分割尺度150的效果,图5为分割尺度200的效果。从图中可以看出,图3虽然能把小的水体分割出来,但是与图4相比大的水体太破碎。而尺度为200的情况,大的水体比较完整,但是有时小的水体却没有独立分割出来,如图5中椭圆里的小块水体,而图4不仅能把小的水体完整独立地提取出来,大的水体也不是很破碎,是最适宜的提取尺度。
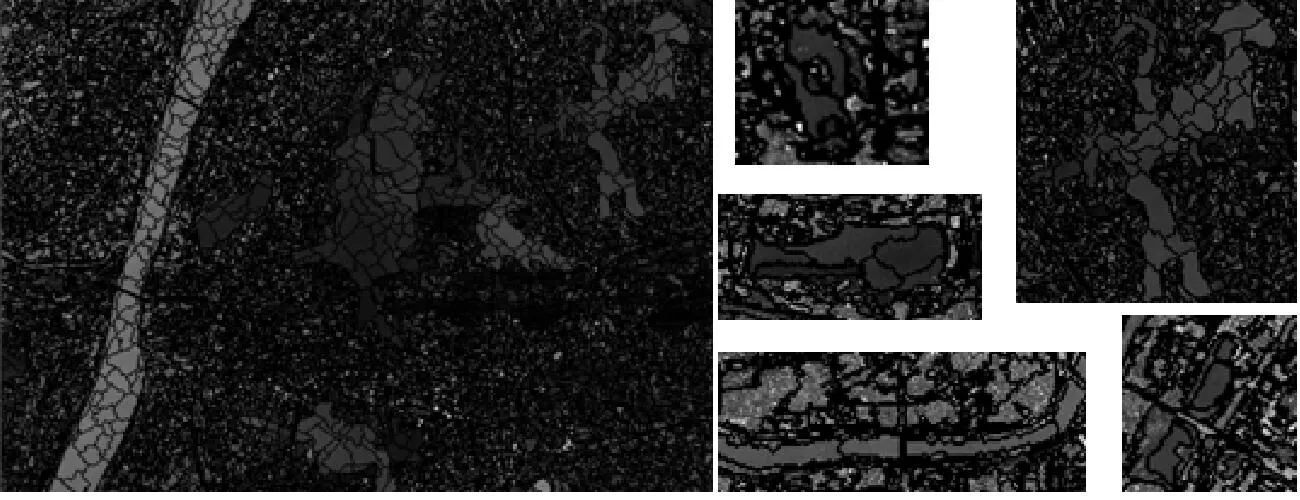
图3 尺度为100的影像分割效果图

图4 尺度为150的影像分割效果图
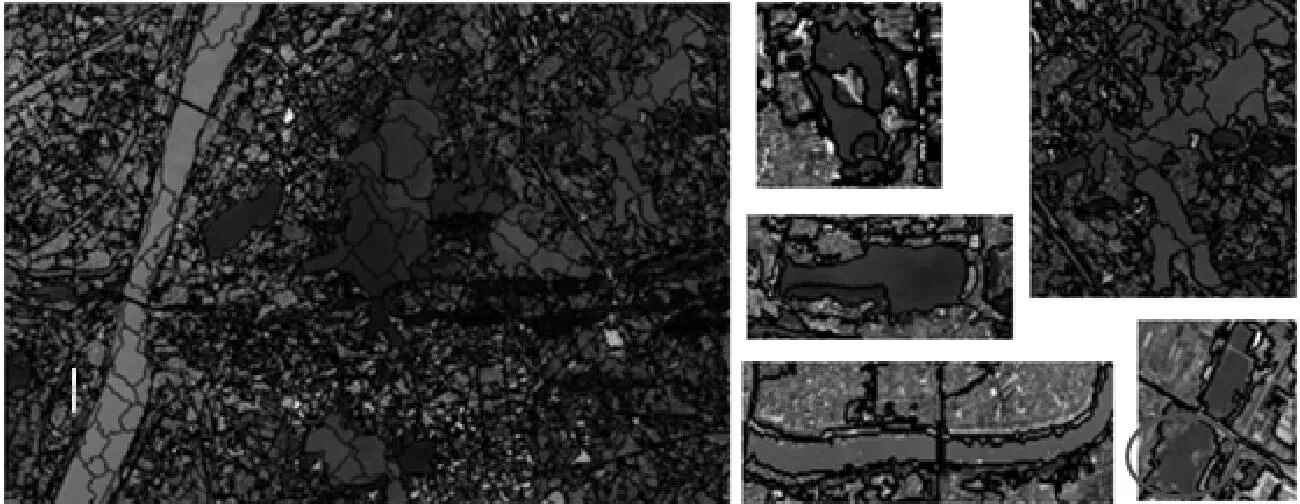
图5 尺度为200的影像分割效果图
3. 水体知识库构建
通常情况下,如果在分类时,仅用一个特征或很少的特征就可以将一个类同其他类区别开,决策支持的模糊分类方法是很好的选择;否则,应选择最邻近分类法,最邻近分类器能更好地处理多维特征空间的联系[10]。在进行水体提取时,通过特征分析,发现仅用一个或很少的特征就可以把水体与其他地物区分开来,因此分类时选择决策支持的模糊分类方法。
使用模糊分类方法,需要首先对对象特征分析的结果建立进行分类的知识库。对象知识库是多种特征的集合,选取地物的多种特征,建立分类规则,能够得到良好的结果。通过对影像水体特征进行分析,进行分类时选择的特征如下:
1) ratio NIR(近红外比率):用于提取水体,并起到区分阴影的效果。

2) max.diff:对对象所有通道的最大最小值作比较,用最大值与最小值的差除以亮度,亮度即为对象在所有通道上强度的平均值。max.diff可以用来区分水体和阴影,它的计算公式为
(1)
式中,对象所有通道中,max为最大值;min为最小值;brightness为亮度。
3) length/width:利用对象长度与宽度比值属性可以进行河流的提取。
4) length、width:利用长度和宽度属性可以进行河流的提取,同时可以用来区分主流和支流。
4. 水体提取及分类
(1) 水体提取与阴影分离
SPOT 5遥感数据具有丰富的光谱和空间信息,利用这些信息,方便判读者进行更准确的地物定位和判读,更容易分辨和认识地物的内部差异和细节信息。本试验充分利用了高分辨率影像这一特有的性质,对分割后的水体对象进行分析研究,利用水体和其他地物的不同特征把水体提取出来。
通过对试验区的水体信息进行分析和研究,发现水体对近红外和中红外波段的吸收比较强,反映在影像上就是在波段1和波段4上水体对象的平均强度值与其他地物比明显偏低。但是,阴影区对近红外和中红外的吸收也比较强,如果只利用近红外或中红外波段则无法区分阴影和水体。通过对阴影对象和水体对象的光谱值进行对比,发现阴影对红色波段和绿色波段的吸收比水体较强,利用这一特征,可以利用近红外比率来进行水体提取。由于水体在近红外波段反射强度低,近红外比率与其他地物比会偏低;同时,水体在红色和绿色波段反射比阴影的强,同样会导致水体近红外的比率比阴影的低。通过反复试验,阈值设置为0.18可得到比较好的效果,小于0.18的为水体,水体提取的效果如图6所示。
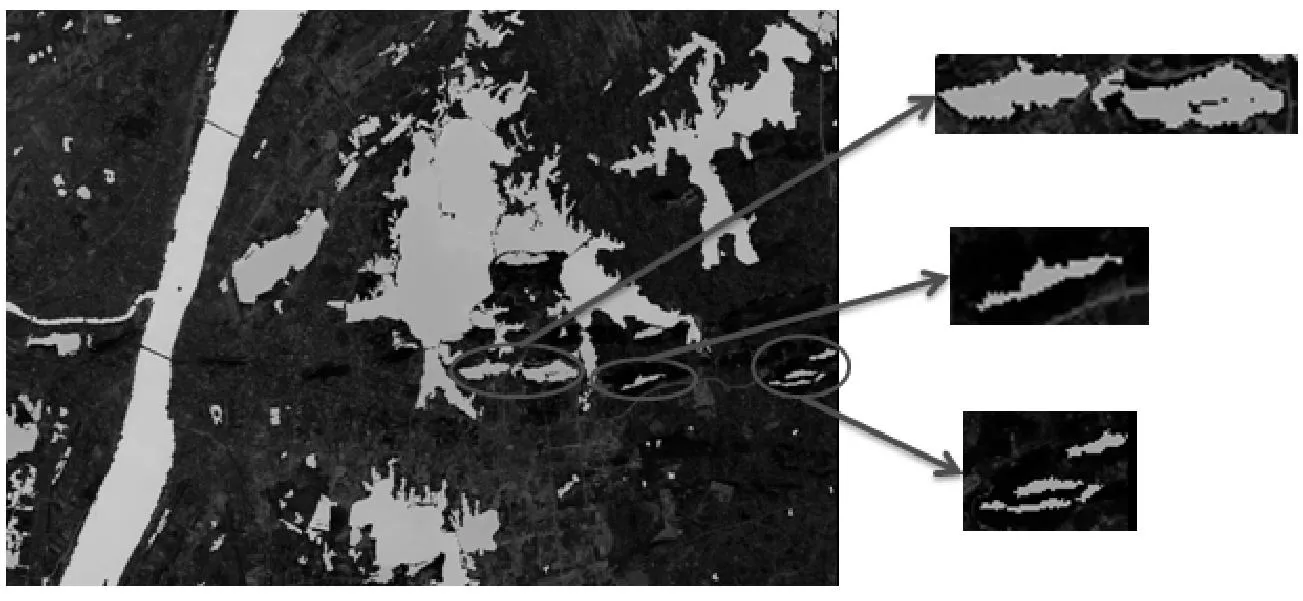
图6 基于面向对象方法用ratio NIR提取水体效果
通过观察发现,这样提取的水体还是混淆了少量的阴影,如在东湖附近的珞珈山、猴山等山地的阴影都随着水体被提取出来了,如图6中椭圆所示。这是因为这些阴影与水体的光谱特性很接近,以至于用近红外比率也难以区分了。通过对这些阴影对象进行分析,发现这些阴影在近红外和中红外波段的亮度值都比水体的高,而在红色和绿色波段的亮度值都比水体的低,这是因为水体的内部结构一致,对不同波段能量进行选择性吸收;而阴影内部结构不一致,对4个波段的能量吸收时没有明显的选择性,因此导致了阴影在近红外和中红外波段的亮度值比水体高,而在绿色和红色波段的亮度值比水体低的特征,可以利用这一特点把阴影和水体区分开来,通过试验选择利用max.diff这一属性。通过反复试验,在利用ratio NIR进行提取结果的基础上,再利用max.diff,阈值设置为0.81可得到很好的水体提取效果,max.diff大于0.81的为水体。提取效果如图7所示,从图中可以看出图6中的山体阴影被很好地消除。

图7 基于面向对象的试验区影像水体提取结果图
(2) 河流和湖泊的分类
通过反复试验寻找最佳分类阈值,对水体进行河流和湖泊的分类。首先设置length/width≥2.2和length>1600像素把主流河流提取出来,在剩下的水体中设置length/width≥3.2和width<160像素把支流河流提取出来,然后把主流和支流合并为河流类,进行河流提取后的水体便是湖泊了。分类的效果如图8所示。

图8 基于面向对象的试验区影像河流湖泊分类效果
五、结果对比分析
为了客观地评价面向对象水体提取的优势与不足,对试验区数据进行了基于传统监督分类方法的水体提取。用ERDAS IMAGINE软件的监督分类功能模块对试验区影像选取了样本,进行传统的最大似然分类、最小距离分类和马氏距离分类。
对面向对象分类结果和面向像元的分类结果进行对比分析。首先从目视效果上进行分析评价,分类结果如图9所示。
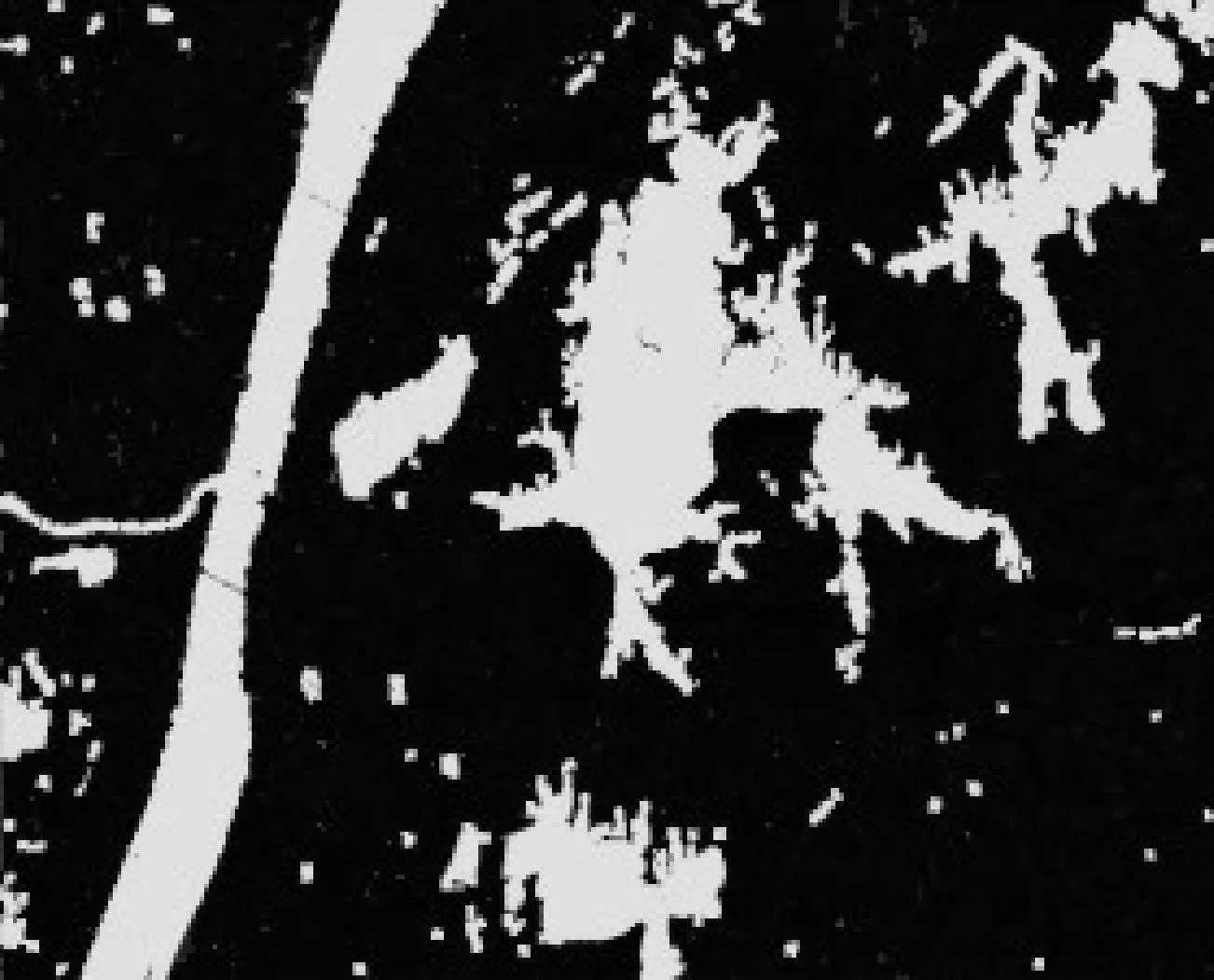
图9 面向对象分类结果
在图10、图11、图12中试验区采用面向像元的分类方法,主要运用影像的光谱特征,分类结果受到同物异谱、异物同谱的影响严重。在图10中,城市区域有很多地方被分成了水体,并且存在很严重的“椒盐噪声”。对于图11用马氏距离法进行分类,它存在非水体被过度分类的问题。图12用最大似然法进行分类,它的分类结果比马氏距离分类法和最小距离分类法的结果精度要高,但它还存在“椒盐噪声”。这些都充分说明了传统分类方法的局限性。
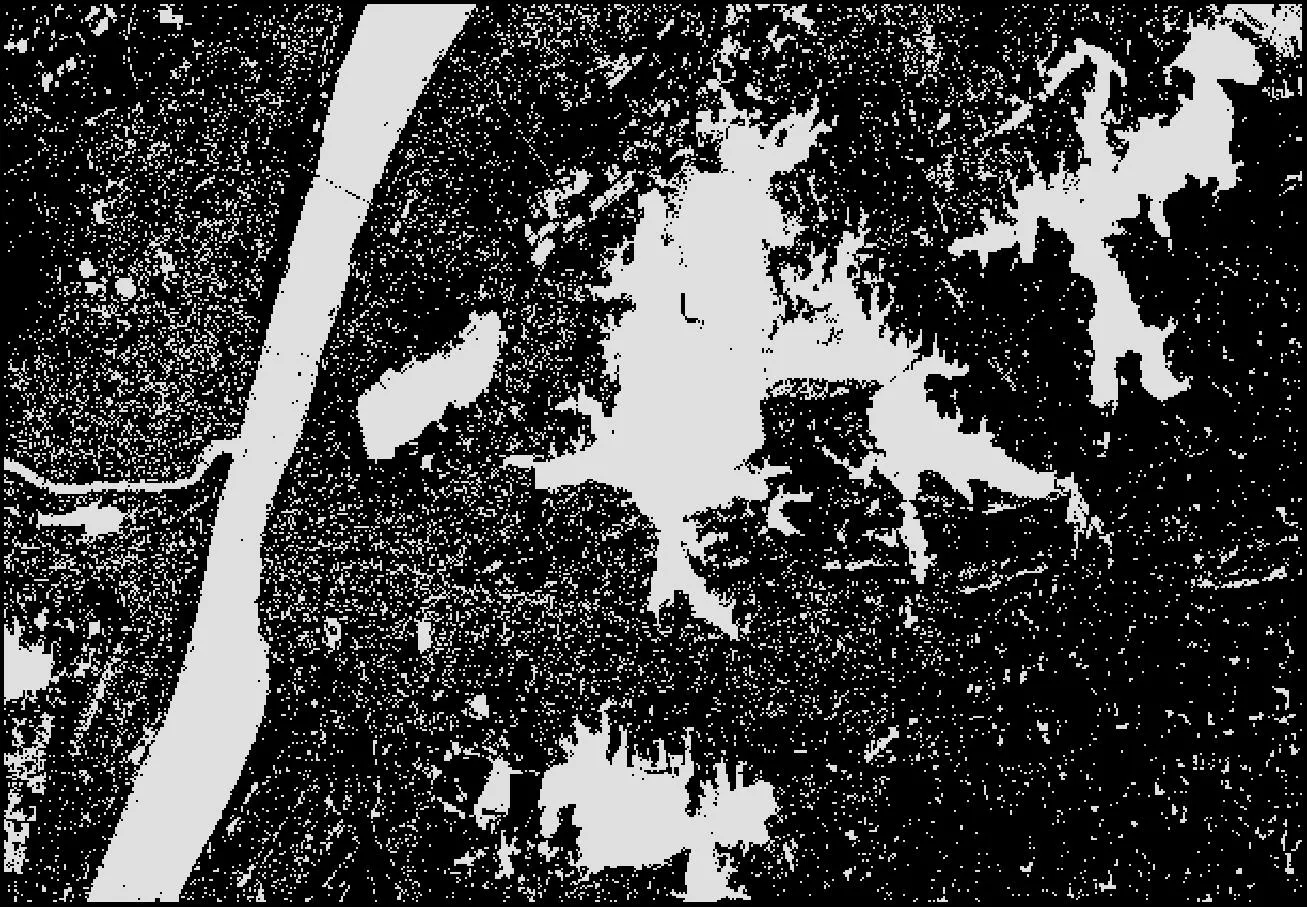
图10 最小距离分类结果
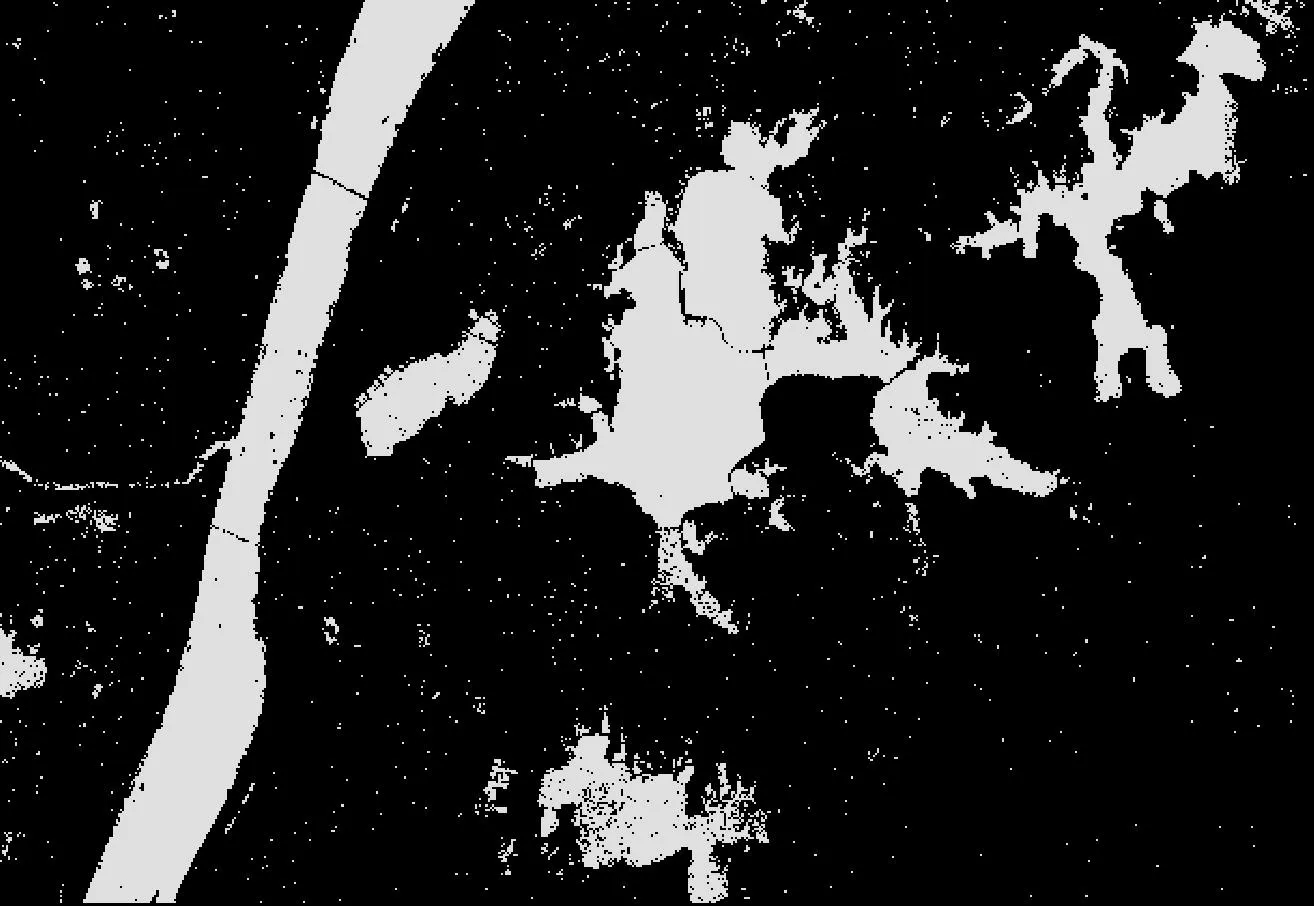
图11 最大似然分类结果
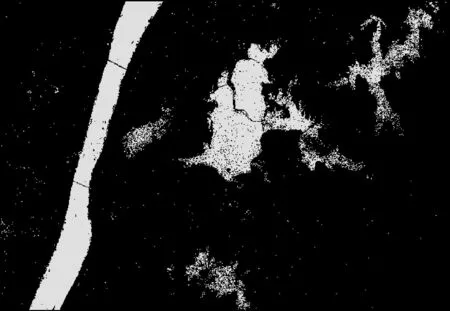
图12 马氏距离分类结果
而通过目视可以看出图9面向对象分类方法在抑制“椒盐噪声”上有很显著的效果,这是因为面向对象的方法分类时充分利用了高分辨率遥感影像丰富的上下文信息。不仅如此,面向对象分类方法大大降低了“同物异谱,异物同谱”的影响。
对试验区面向像元的分类结果进行精度评价,利用ERDAS IMAGINE软件,运用散点法随机分配256个样点作为检验样本。对面向对象法用eCognition软件进行基于TTA Mask的精度评价方法。精度评价的结果如表1所示。
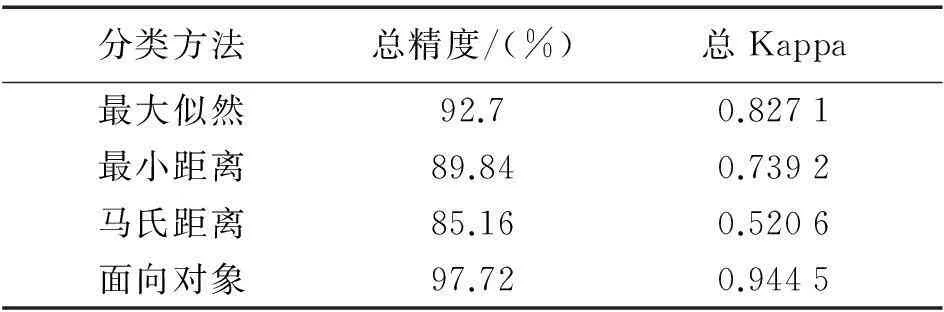
表1 水提取精度评价结果
从表1中可以看出,面向对象分类方法在总精度和总Kappa上明显高于传统的面向像元分类方法。
六、结论
本文利用武汉市的SPOT 5影像数据,进行面向对象的水体提取方法研究,通过试验对比分析得出以下结论:
1) 本文利用武汉市的SPOT 5影像进行面向对象的水体提取,对水体的提取精度达到了97.72%,
明显高于传统的面向像元水体提取方法。
2) 面向对象方法充分利用了高分辨率遥感影像丰富的光谱、形状和影像中地物间上下文等信息,使得水体和阴影得到了有效区分,提高了分类的精度。
3) 与传统面向像元的分类方法不同,面向对象方法对提取的同质对象进行分类,破碎对象减少,具有很强的抗噪声能力,抑制了“椒盐现象”。
4) 面向对象分类方法的精度受到分割结果的质量和分类规则有效区分性的影响。如何选择最优分割参数和分割尺度,建立有效的分类规则是提高面向对象分类方法的关键。
参考文献:
[1]刘建波, 戴昌达. TM图像在大型水库库情监测管理中的应用[J]. 环境遥感, 1996, 11(1): 54-58.
[2]陆家驹, 李士鸿.TM资料水体识别技术的改进[J]. 环境遥感, 1992, 7(1): 17-23.
[3]BARTON I J, BATHOLS J M. Monitoring Floods with AVHRR[J]. Remote Sensing of Environment, 1989, 30(1): 89-94.
[4]杜云艳, 周成虎. 水体的遥感信息自动提取方法[J]. 遥感学报, 1998, 2(4): 264-269.
[5]周成虎, 杜云艳, 骆剑承. 基于知识的AVHRR影像的水体自动识别方法与模型研究[J]. 自然灾害学报, 1996, 5(3): 100-108.
[6]杨存建, 徐美. 遥感信息机理的水体提取方法的探讨[J]. 地理研究, 1998, 17(S0): 86-89.
[7]徐涵秋. 利用改进的归一化差异水体指数(MNDWI)提取水体信息研究[J]. 遥感学报, 2005, 9(5): 589-595.
[8]乔玉良, 尚彦玲, 魏信. 遥感图像融合方法研究[J]. 气象与环境科学, 2010, 33(1): 73-76.
[9]曹凯, 江南, 吕恒,等. 面向对象的SPOT 5影像城区水体信息提取研究[J]. 国土资源遥感, 2007(2): 27-30.
[10]孙家抦. 遥感原理与应用[M]. 武汉: 武汉大学出版社, 2009:73-76.
引文格式: 殷亚秋,李家国,余涛,等. 基于高分辨率遥感影像的面向对象水体提取方法研究[J].测绘通报,2015(1):81-85.DOI:10.13474/j.cnki.11-2246.2015.0016
通信作者:李家国。jacoli@126.com
作者简介:殷亚秋(1990—),女,硕士,主要从事环境遥感方面的研究。E-mail:823239682@qq.com
基金项目:国家青年科学基金
收稿日期:2014-12-15
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2015)01-0081-05
