双轴驱动混合动力车辆能量管理策略
2016-01-25江冬冬李道飞俞小莉
江冬冬, 李道飞, 俞小莉
(浙江大学 动力机械及车辆工程研究所,浙江 杭州 310027)
双轴驱动混合动力车辆能量管理策略
江冬冬, 李道飞, 俞小莉
(浙江大学 动力机械及车辆工程研究所,浙江 杭州 310027)
建立双轴驱动混合动力车辆(DDHEV)效率分析模型,并构建杭州市循环工况.根据动态规划控制策略的仿真结果获得新规则控制策略,评估新规则控制策略的节油效果.结果表明:相比于传统的规则控制策略,新规则控制策略可以使车辆燃油经济性在拥堵工况下提高35.5%,在顺畅工况下提高24.9%,在高架工况下提高4.8%.为提高新规则控制策略在不同工况下的适应性,采用学习向量量化神经网络识别实际运行工况,调整相应的控制参数,并评估节油效果.结果表明:在实际运行工况下,相比于采用单个新规则控制策略,采用工况识别来调整新规则控制策略参数可使燃油经济性提高28.2%以上.所提出的模型满足了双轴驱动混合动力车辆的实际应用需求,提高了车辆的燃油经济性.
双轴驱动混合动力车辆(DDHEV);工况构建;能量管理;规则提取;工况识别
双轴驱动混合动力车辆(dual drive hybridelectric vehicles,DDHEV)是四轮驱动技术与混合动力技术相结合的产物,兼具四驱车辆的动力性、通过性、操纵性和混合动力电动车辆的经济性[1].同时,DDHEV改造较为容易,不需要完全重新设计整车结构,可为汽车公司节省大量的研发时间和成本.目前,国内外汽车公司纷纷推出了各自的DDHEV.
我国城市间的道路状况差异较大,因此城市间的车辆循环工况特征也有较大区别[2].循环工况对能量管理策略的制定有很大影响,大量文献对国内不同城市循环工况的构建进行了研究[3-6],但是对于杭州市循环工况构建的研究很少.目前,针对DDHEV的研究主要包括换挡策略、模式切换平顺性[7-8]和能量管理控制策略研究[9-11]等.其中,DDHEV能量管理策略主要包括动态规划控制策略(dynamic programming, DP)、等效燃油消耗最小控制策略(equivalent consumption minimization strategy, ECMS)和基于规则的控制策略(rule-based, RB)等.混合动力车辆在实际应用中的控制策略目前只有规则控制策略,当前文献针对DDHEV采用规则控制策略时并没有对其进行优化,也没有考虑运行工况的影响.
本文针对双轴驱动混合动力车辆的能量管理策略进行研究.通过构建杭州市循环工况,并采用动态规划控制策略对其进行仿真计算;根据其计算结果提取出新规则控制策略,进而采用学习向量量化神经网络(learning vector quantization neural network,LVQNN)识别车辆当前的运行工况;根据识别结果实时调整新规则控制策略的参数,以获得更好的燃油经济性.
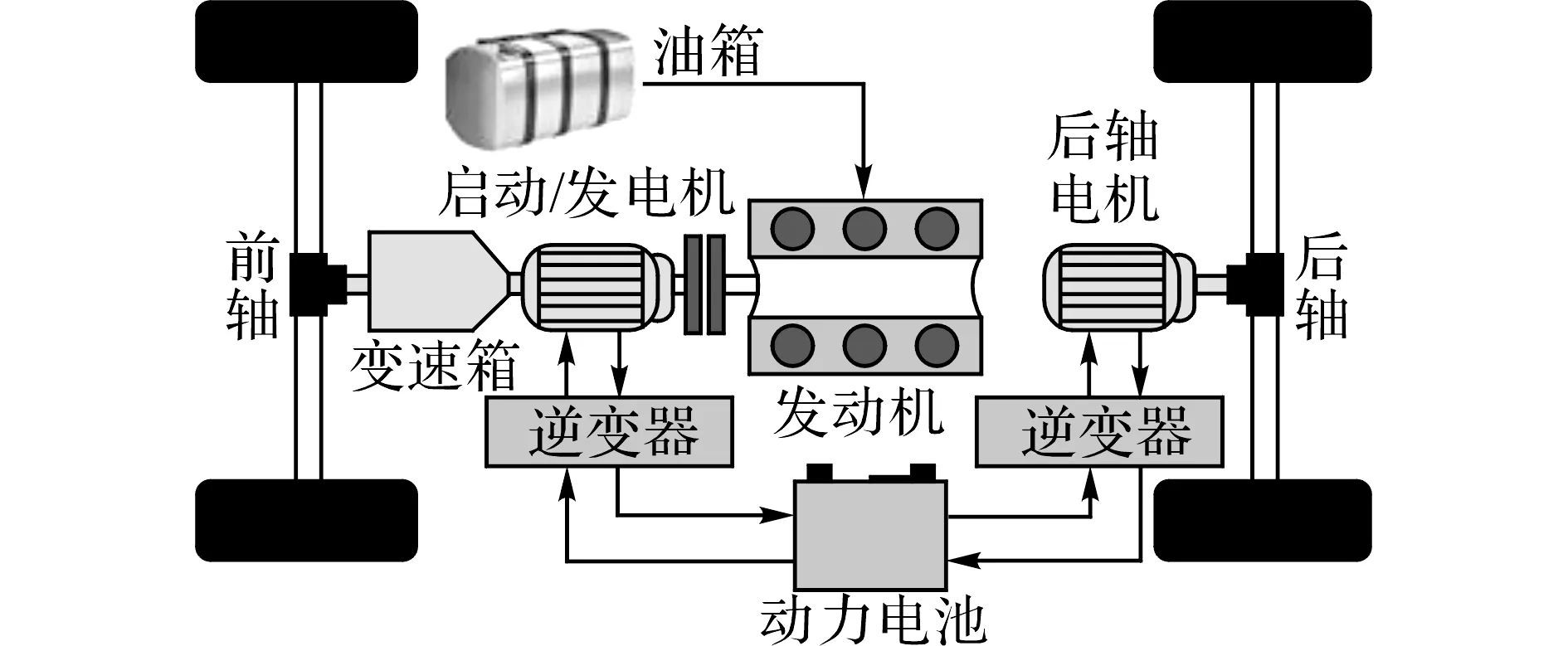
图1 双轴驱动混合动力车辆结构示意图Fig.1 Structure diagram of dual drive hybrid electric vehicles (DDHEV)
1 模型构建
DDHEV的结构如图1所示,以内燃机车辆(internal combustion engine vehicles, ICEV)为基础,只需要在发动机和变速箱之间增加启动/发电机(integrated starter/generator, ISG),在后轴处增加驱动电机(rear-axle motor, RAM)以及动力电池等相关部件即可.DDHEV的主要参数如表1所示,由于其部件比ICEV更多,假设DDHEV比ICEV重300 kg,其余相同部件的参数不变.
表1 双轴驱动混合动力车辆主要参数
Tab.1 Main parameters of dual drive hybrid electric vehicles (DDHEV)
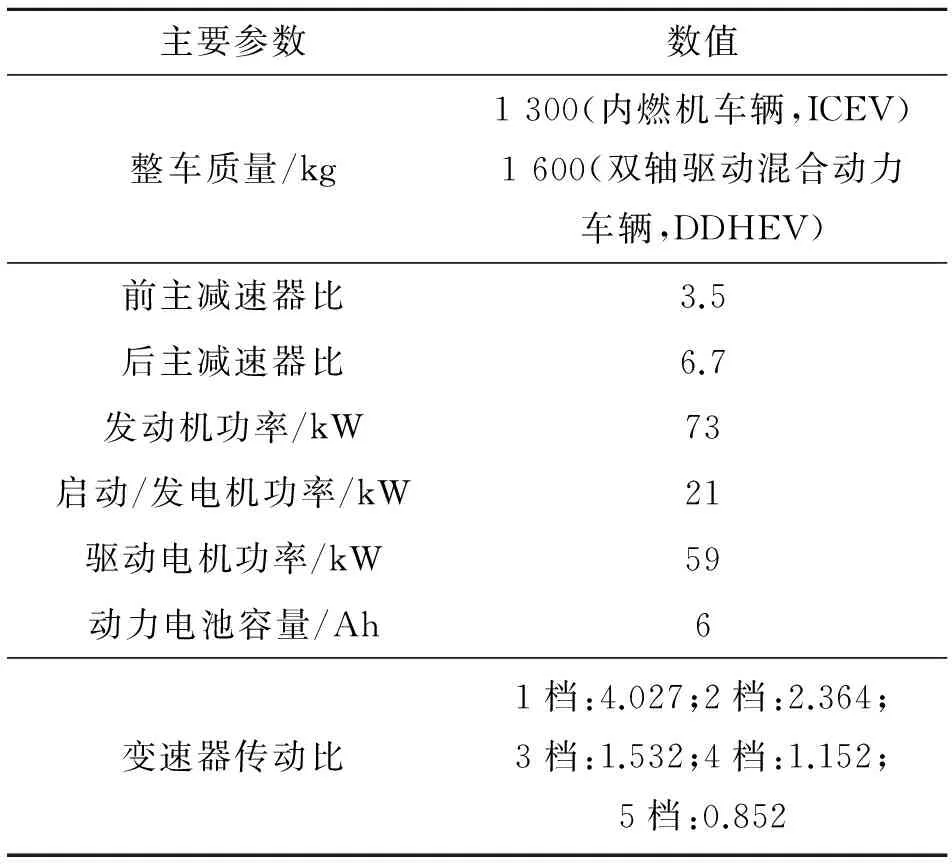
主要参数数值整车质量/kg1300(内燃机车辆,ICEV)1600(双轴驱动混合动力车辆,DDHEV)前主减速器比3.5后主减速器比6.7发动机功率/kW73启动/发电机功率/kW21驱动电机功率/kW59动力电池容量/Ah6变速器传动比1档:4.027;2档:2.364;3档:1.532;4档:1.152;5档:0.852
DDHEV模型基于Advisor软件中的Parallel SA模型修改得到,如图2所示.在原模型的基础上添加后轮模块、后主减速器模块和后轴驱动电机模块,如图中虚线框①所示.此外,由于原模型为前轴驱动,需要对其牵引力控制模块及前、后轴之间的转矩分配模块进行修改,如图中虚线框②所示,具体修改过程见文献[12].
2 杭州市循环工况构建
车辆循环工况的基本开发流程如下:试验规划、数据采集、数据分析与处理和工况构建.本文试验采用自主行驶法,即对象车辆驾驶员自由驾驶车辆.该方法在时间和道路方面没有规定,随意性强.为了反映车辆在不同时间段的运行特征,通过车辆的控制器局域网络(controller area network, CAN)记录一个月内的运行数据.对于数据分析与处理及工况构建的具体过程详见文献[3-6].
由上述工况构建流程可得到如图4所示的3类杭州市循环工况:拥堵工况、顺畅工况、高架工况.图中,t为时间,v为车辆运行速度,可以看出不同工况下的运行速度曲线存在明显区别.如图3(a)所示的拥堵工况,最高车速小于40 km/h,停车等待时间较长;如图3(b)所示的顺畅工况,车速大部分在30~60 km/h范围内,停车等待时间很短;如图3(c)所示的高架工况,车速大部分在60~90 km/h范围内,停车等待时间很短.

图2 双轴驱动混合动力车辆模型示意图Fig.2 Schematic diagram of DDHEV model
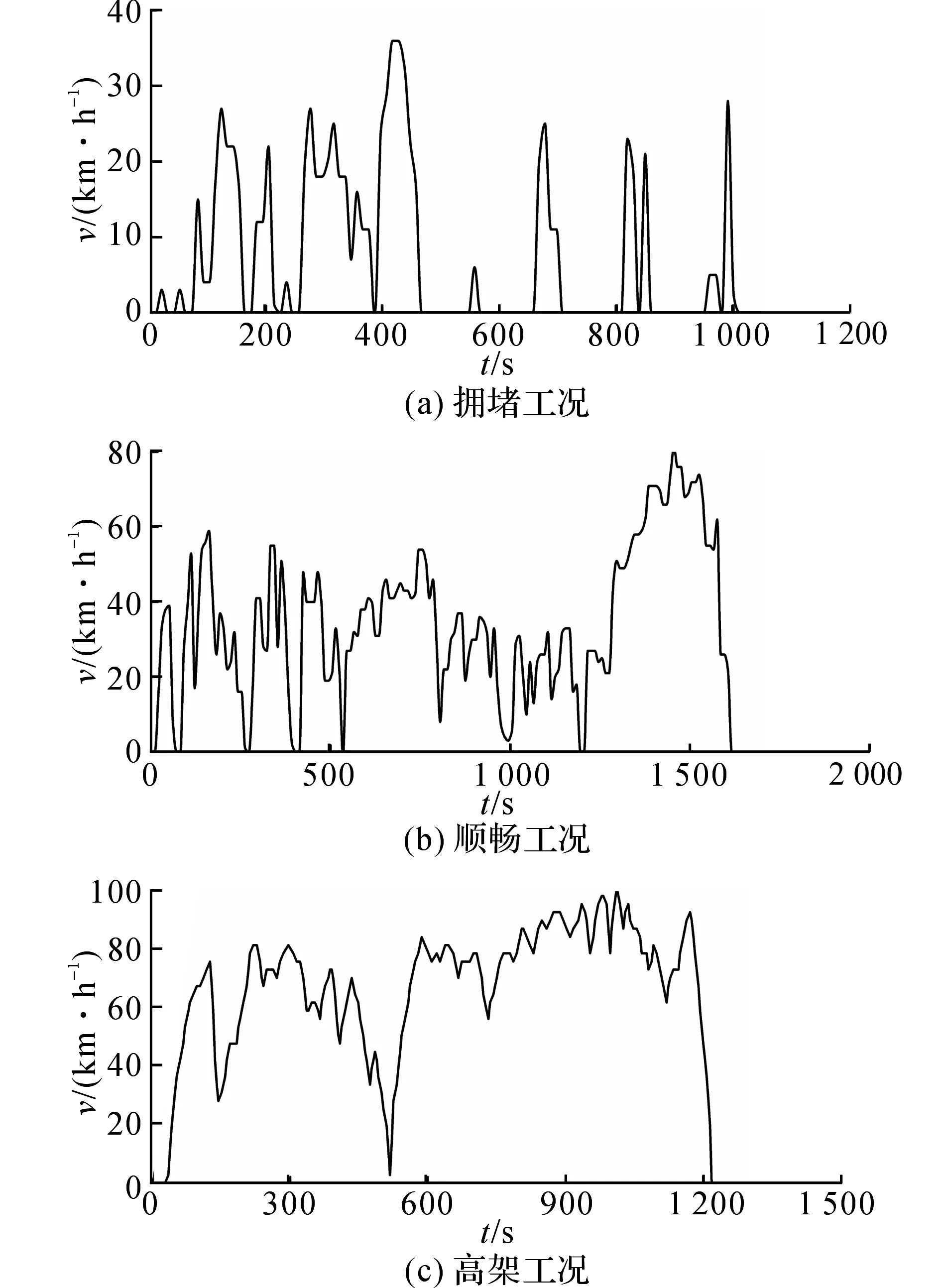
图3 杭州市(拥堵、顺畅、高架)循环工况图Fig.3 Hangzhou driving cycle diagrams of congestion, smooth and elevated highway
3 控制策略开发
3.1 传统的规则控制策略
传统的规则控制策略(traditional rule-based, TRB)设定了一系列的门限值,在维持动力电池荷电状态(state of charge, SOC)处于允许范围内的前提下,通过车辆需求功率、车速等因素根据设定的规则对车辆的运行模式进行切换,并对各部件进行动力分配[13-14].
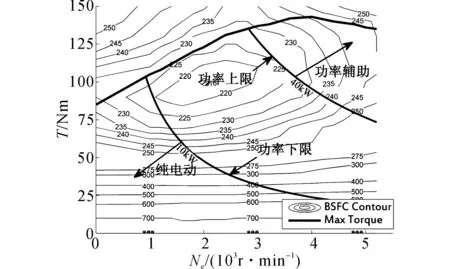
图4 传统的规则控制策略下发动机运行区域示意图Fig.4 Schematic diagram of engine operation area with traditional rule-based (TRB) control strategy
根据发动机的有效燃油消耗率图,通过2条等功率线(功率上限Pup,功率下限Pdn)将发动机运行区域限制在其内部,划分结果如图4所示.其中,Ne为发动机转速,T为发动机转矩.
为DDHEV设定的规则如下.
1) 纯电动驱动:Pd
2) 发动机单独驱动:
Pdn
Peng=Pd.
3) 联合驱动:
Pd>Pup,S>Sl,
Peng=Pup,Peng+PRAM+PISG=Pd.
4) 行车充电:
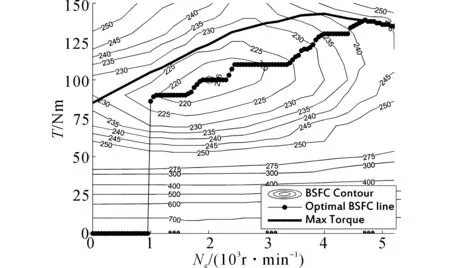
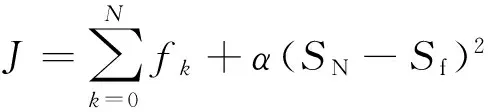
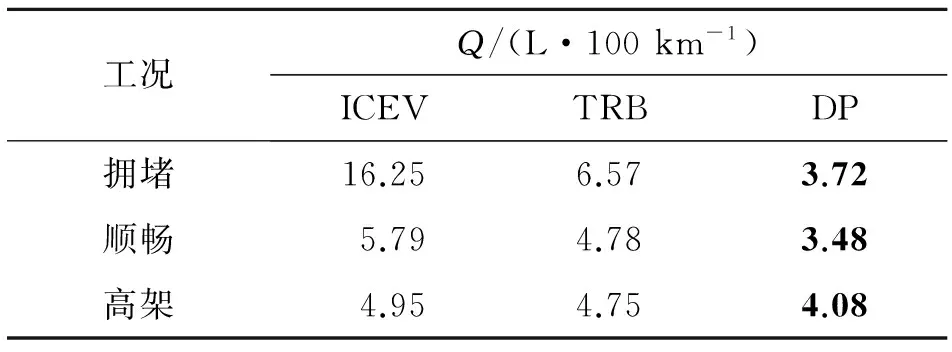
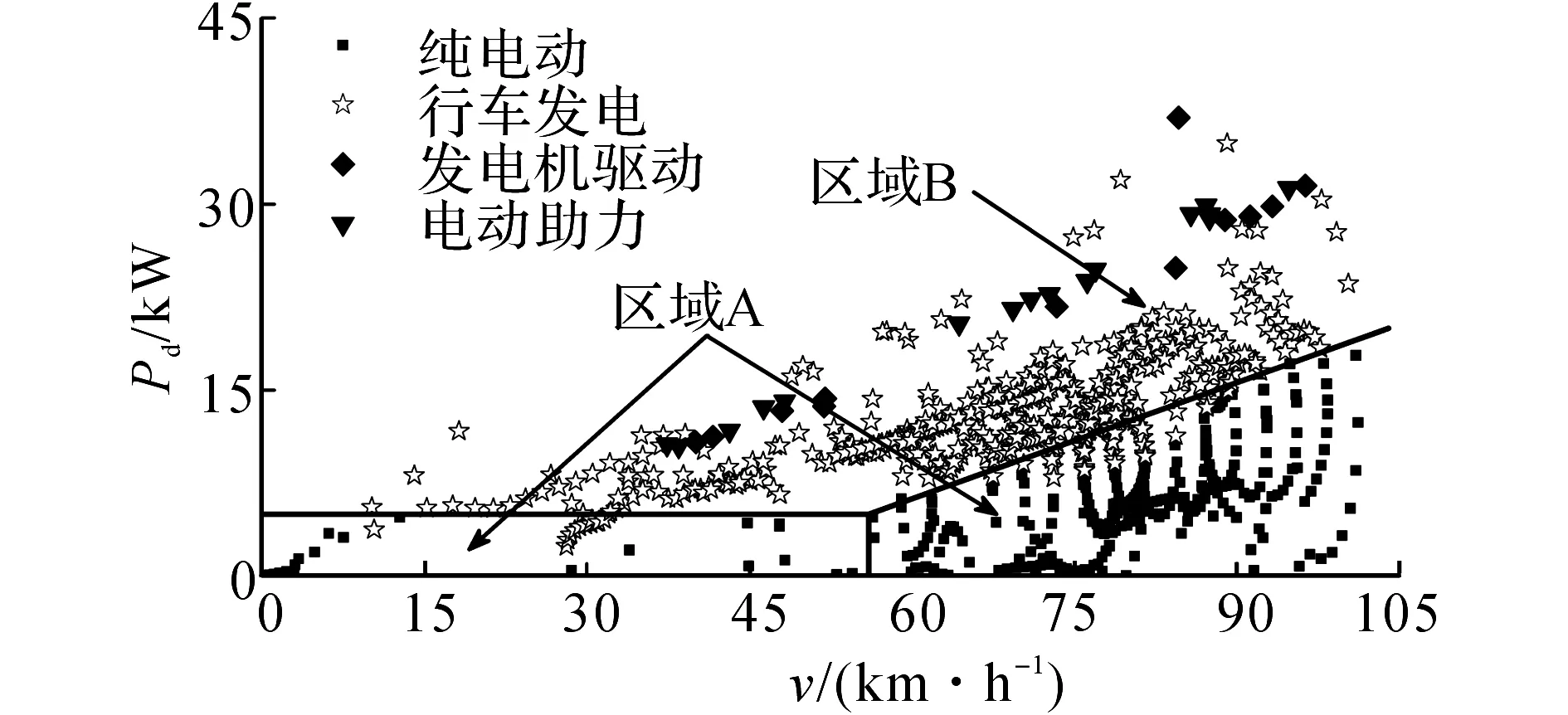
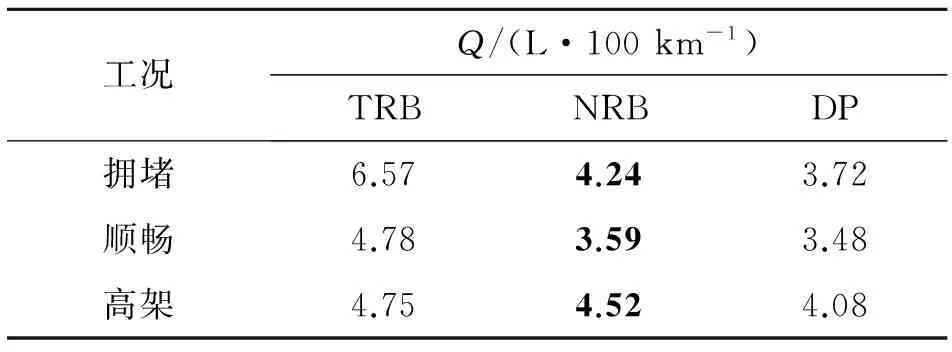
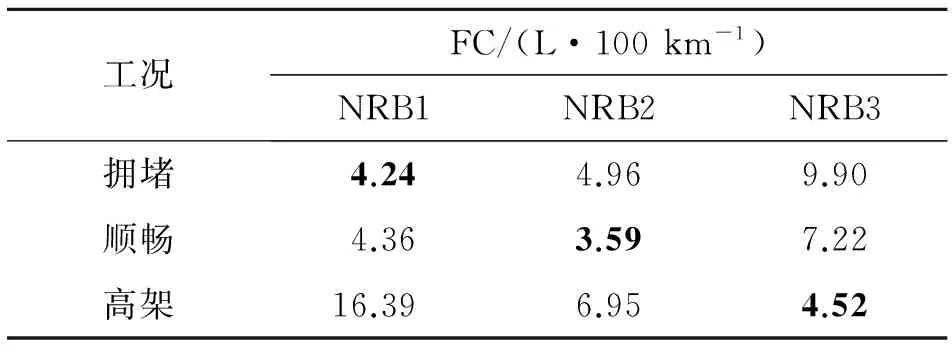
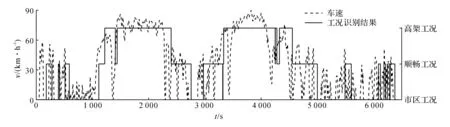
S<(Sl+Sh)/2,Pd Peng=Pup,PISG=Peng-Pd. 5) 制动控制:Pd<0,则 PRAM=max (-max (PRAM),Pd), PISG=max (-max (PISG),Pd-PRAM), PMB=Pd-PRAM-PISG.式中:Pd和PMB分别为需求功率和制动功率,Peng、PRAM和PISG分别为发动机、后轴电机和启动/发电机的输出功率,S为动力电池荷电状态,Sh、Sl分别为动力电池荷电状态允许的上下限,-max (PRAM)、-max (PISG)分别为RAM和ISG的最大制动功率. 3.2 动态规划控制策略 动态规划控制策略的中心思想是将多阶段决策问题转化为一系列的单阶段决策问题.在每个阶段都做出决策,根据现阶段所作的决策可获得现阶段的效益,也可获得下一个阶段的初始状态.在每个阶段的决策选定之后,就可得到一个决策序列,最后通过正向寻优的方法找到最优的决策序列,从而获得最优的效益总和. DDHEV和丰田普锐斯(Prius)车辆,由于结构不同,在采用动态规划进行仿真时存在一定的区别. 1) 在进行动态规划计算时,Prius和DDHEV的决策变量和状态变量如表2所示.共同之处是都有3个动力部件,需要将其中2个动力部件的输出转矩作为控制变量,从而确定另一个部件的输出转矩,并以动力电池荷电状态作为状态变量.不同之处如下:DDHEV不存在行星齿轮结构,不能实现电无极变速功能,其动力部件的转速、转矩与变速器档位相关,在控制变量中需要添加变速器档位作为控制参数;其发动机转速与车速直接相关,不需要将发动机转速作为状态变量,只需要将动力电池荷电状态作为状态变量.动态规划的计算量随决策变量和状态变量的增加呈指数增长,为了减少计算量,同时简化规则提取,规定发动机沿着比油耗最小的曲线运行,如图5所示.发动机转矩可由发动机转速和比油耗最小曲线获得,最终决策变量可简化为后轴电机转矩和变速器档位,如表2所示. 表2 普锐斯和DDHEV采用动态规划控制策略时的决策变量和状态变量对比 Tab.2 Decision and state variables comparison of dynamic programming control strategy based on Prius and DDHEV 对象车辆决策变量状态变量普锐斯发动机转矩电动机转矩发动机转速、动力电池荷电状态DDHEV发动机转矩后轴电机转矩变速器档位动力电池荷电状态DDHEV(参数简化)后轴电机转矩变速器档位动力电池荷电状态 图5 DDHEV发动机比油耗最小曲线图Fig.5 Optimal brake specific fuel consumption line of DDHEV engine 2) 由于DDHEV的后轴电机转速范围不能够满足车辆高速运行,在低速运行时是3个动力部件之间进行动力分配,而高速时只有前轴2个动力部件进行动力分配. 3) Prius的2个电机都可根据运行工况的需求进行发电或者驱动.DDHEV的后轴电机和前轴并不直接相连,通过前轴驱动带动后轴电机进行发电,整体效率较低.因此在驱动时,设定只有启动/发电机可以发电,后轴电机不可发电,只有在制动能量回收模式下时后轴电机才进行发电. DDHEV采用动态规划求解的步骤[15-17]如下. 1) 阶段的划分:在研究车辆的燃油经济性时,高于1 Hz的车辆瞬态特性可以忽略不计,以步长Δt=1 s将整个循环工况时间段分割为N个阶段. 2) 状态变量及决策变量:状态变量要求能够反映出整个循环过程中车辆的变化特性,并且具有无后效性.如表2所示,DDHEV的状态变量为动力电池荷电状态,简化后的决策变量为后轴电机转矩和变速器档位. 3) 状态转移方程为 (1) 式中:x为状态变量,k为仿真的阶段,Δt为仿真步长,PRAM、PISG分别为后轴电机和启动/发电机的输出功率,Wb为动力电池的总能量. 4) 目标函数:优化目标为在给定的循环工况下,以总油耗最小为前提,并对动力电池荷电状态进行约束,求解最优的决策变量u(k),因此动态规划的目标函数中包含了2个子函数,可表示为 (2) 式中:等号右侧第一项为燃油消耗目标子函数,第二项为动力电池荷电状态的偏差惩罚函数,Sf为循环工况结束时的动力电池荷电状态值,SN为目标动力电池荷电状态值,α为加权因子. 在求解极小值时,对动力电池荷电状态,发动机、启动/发电机、后轴电机的转矩和转速以及变速器档位进行约束,以保证所有运行参数的变化处于允许范围内. 动态规划求解过程是基于Bellman优化原理[15],主要分为以下4步: 1) 在给定循环工况下,计算每个时间阶段整车的功率; 2) 在满足整车需求功率的前提下,计算采用不同的功率分配方式时的油耗; 3) 从工况终端时间点开始,逆向推导,完成整个循环工况下整车油耗最小值的计算,并标记每个时间阶段下获得最小值的控制量; 4) 从工况始端时间点开始,正向求解,获得整个循环工况下的最优控制策略. 3.3 仿真结果分析 针对杭州市3个循环工况,分别采用传统的规则控制策略和动态规划控制策略对DDHEV进行仿真计算,并以ICEV作为对比,结果如表3所示.其中Q指车辆百公里油耗,ICEV指仿真对像是传统内燃机车辆,TRB指对DAHEV采用传统的规则控制策略,DP指对DAHEV采用动态规划控制策略.为修正传统的规则控制策略在仿真始末因动力电池荷电状态不同而引起的整车燃油消耗量差异,方便对比各个控制策略的油耗,采用线性矫正法对燃油消耗量结果进行修正. 由表3可知,虽然ICEV重量较轻,但在拥堵工况下发动机长时间运行于怠速及低速区域,油耗偏高,而在顺畅工况及高架工况下效率有所提升,油耗 表3 拥堵、顺畅和高架工况采用传统规则控制和动态规划控制策略的百公里油耗 Tab.3 Fuel consumption per hundred kilometers of using TRB and dynamic programming control strategy under congestion, smooth and elevated highway driving cycles 工况Q/(L·100km-1)ICEVTRBDP拥堵16.256.573.72顺畅5.794.783.48高架4.954.754.08 下降明显.相对于ICEV,尽管DDHEV的重量增加了300 kg,采用传统的规则控制策略可使车辆燃油经济性在拥堵工况、顺畅工况以及高架工况下分别提高59.6%、17.4%和4.0%.采用动态规划控制策略时的燃油经济性比采用传统的规则控制策略在拥堵工况、顺畅工况和高架工况下分别提高43.4%、27.2%和14.1%. 3.4 新规则控制策略的提取 由上述分析可知,相比于传统的规则控制策略,采用动态规划控制策略进一步提高了燃油经济性,但其计算量大,不适用于车辆实际运行工况.因此,基于动态规划控制策略的仿真结果,提取新的规则控制策略(new rule-based, NRB). 以顺畅工况为例,采用动态规划控制策略获得如图6(a)中的仿真结果.将仿真结果由时间-车速对应转化为车速-需求功率,得到如图6(b)、6(c)、6(d)和6(e)所示的档位分布图、运行模式分类图、制动模式下电机功率图和纯电动模式下电机功率图. 如图6(b)所示,随着车速、需求功率的变化,各个档位分布在有着明显界限的不同区域内,由此获得顺畅工况下的换挡策略.如图6(c)所示,顺畅工况下主要有4种运行模式,纯电动、行车发电、发动机驱动和电动辅助,主要的运行模式为电动模式和行车发电模式,发动机单独驱动模式和电动助力模式出现的较少,因此根据各个模式的疏密程度将其分割成A、B 两个区域.其中A区为纯电动模式,车辆需求功率较小,发动机运行效率较低,而此时电机的效率较高,因此应由电机单独驱动车辆,提高燃油经济性;B区包括了除纯电动模式之外的发动机单独驱动、行车发电和辅助驱动3种模式,此时发动机启动,沿着比油耗最小曲线运行,启动/发电机则补充不足的功率或者吸收多余的功率. 图6 顺畅工况下动态规划仿真结果(档位分布、运行模式分类、纯电动和制动能量回收模式下2个电机的功率分配)Fig.6 Dynamic programming simulation results of smooth driving cycle (gear distribution, working pattern classification, power allocationbetween two motors under electric mode and brake energy regeneration mode) 如图6(d)所示,处于制动能量回收模式时主要由后轴电机回收制动能量,因此将此模式下的规则设置为后轴电机优先回收制动能量,启动/发电机回收剩余的制动能量.如图6(d)所示,当处于纯电动模式时,动力绝大部分由后轴电机提供,因此将此模式下的规则设置为由后轴电机优先提供驱动力,启动/发电机补充不足部分.对于DDHEV来说,后轴电机主要用于在纯电动模式下提供驱动力及在制动能量回收模式下回收制动能量;而ISG电机主要用于在制动能量回收模式下辅助进行制动能量回收及在纯电动模式下辅助驱动,并在辅助驱动和行车发电模式下调整发动机运行状态,使其沿着于比油耗最小曲线运行. 如图7、6(c)和8所示分别为拥堵工况、顺畅工况及高架工况下的模式划分图,虽然在不同工况下划分的区域不同,但都可以表示成以下规则控制. 1) 若(Pd,V)∈区域A,PRAM=Pd; 2) 若(Pd,V)∈区域B,Peng=Popt,PISG=Pd-Peng; 3) 若Pd<0,PRAM+PISG=Pd.其中,Pd为需求功率,Peng、PRAM和PISG分别为发动机、后轴电机和启动/发电机的输出功率,Popt为发动机转速根据发动机比油耗最小曲线对应的输出功率. 上述3个工况下提取得到的新规则控制策略分别为拥堵工况的新规则控制策略、顺畅工况的新规则控制策略以及高架工况的新规则控制策略.对这3个循环工况分别采用传统规则控制策略、新规则控制策略及动态规划控制策略进行仿真计算,结果如表4所示.相比于动态规划控制策略,采用工况对应的新规则控制策略时油耗略有增加,但相比于传统的规则控制策略,其燃油经济性在拥堵工况、顺畅工况和高架工况下分别提高了35.5%、24.9%和4.8%,说明了新规则控制策略的有效性. 图7 基于动态规划的拥堵工况运行模式分类图Fig.7 Work pattern classification diagram of congestion driving cycle based on dynamic programming 图8 基于动态规划的高架工况运行模式划分图Fig.8 Work pattern classification diagram of elevated road driving cycle based on dynamic programming 表4 拥堵、顺畅和高架工况采用传统规则、新规则和动态规划控制策略的百公里油耗值 Tab.4 Fuel consumptions per hundred kilometers of using TRB, new rule-based and dynamic programming control strategy under congestion, smooth and elevated highway driving cycles 工况Q/(L·100km-1)TRBNRBDP拥堵6.574.243.72顺畅4.783.593.48高架4.754.524.08 由于3个新规则控制策略的区域划分及换档策略不同,在相同需求功率下分配到各驱动系统的功率并不相同,导致车辆燃油经济性不同.对拥堵工况、顺畅工况和高架工况分别采用3个新规则控制策略进行仿真,结果如表5所示.其中NRB1为拥堵工况的新规则控制策略,NRB2为顺畅工况的新规则控制策略,NRB3为高架工况的新规则控制策略.单个新规则控制策略只能在对应的循环工况下获得最好的燃油经济性,不能在所有工况下都获得最佳的燃油经济性.为了使车辆能在实际工况中获得较好的燃油经济性,需要对实际工况进行识别,并根据识别结果对不同工况调整控制参数. 表5 拥堵、顺畅和高架工况采用新规则控制策略的百公里油耗 Tab.5 Fuel consumptions per hundred kilometers of using new rule-based (NRB) control strategy under congestion, smooth and elevated highway driving cycles 工况FC/(L·100km-1)NRB1NRB2NRB3拥堵4.244.969.90顺畅4.363.597.22高架16.396.954.52 学习向量量化神经网络属于前向有监督神经网络类型,在模式识别和优化领域有着广泛的应用[18-20].本文采用基于学习向量量化神经网络的工况识别方法对工况进行识别,主要流程如图9所示,根据3个循环工况的数据,将行驶工况以每180 s分为多个小片段,每个片段之间可以叠加,然后对每个片段进行特征参数计算.各个特征参数对识别的影响程度各不相同,部分参数之间功能重叠,经过筛选得到的循环工况特征参数为平均车速、车速标准差、平均减速度、加速度标准差、每100 s内速度变化大于2 km/h的平均次数、每100 s内速度变化大于10 km/h的平均次数、减速度大于-0.96 m/s2且小于-0.6 m/s2的时间占减速时间的百分比和加速度大于1.03 m/s2的时间占加速度时间的百分比.在Matlab软件中构建学习向量量化神经网络的命令是net=newlvq(P,K,C,R,F).其中P为不同工况下的特征参数构成的N×8维矩阵,其中N为3个工况的总时间长度;K为隐含层神经元的数目,设置为40;C为第二层的权值中所列属类别的百分比,其中拥堵工况、顺畅工况和高架工况所占比例分别为28.93%、30.53%和40.55%;R为学习速率,设定为默认值0.01;F为学习函数,设定为默认值learnlv1.为了验证所获得的神经网络模型的准确性,根据循环工况片段数据提取出特征参数,将不同工况下的特征参数导入神经网络模型中进行识别,可得各个工况的识别正确率均为100%,精度满足使用要求. 图9 循环工况采用学习向量量化神经网络实时识别的流程图Fig.9 Flow chart of driving condition real-time recognition based on the learning vector quantization neural network 循环工况的在线识别可通过Labview软件和Matlab软件的联合仿真来实现.在Matlab软件中建立LVQNN模型,在Labview软件中进行数据采集、数据处理及显示等.两者之间通过Labview软件中的Matlab Script连接起来,LVQNN模型在Matlab软件中生成,将Labview软件采集得到的数据导入模型中,即可得到当前运行工况的识别结果. 由于Labview软件调用的神经网络模型是在Simulink环境中生成的,实时识别和离线识别的结果相同.经测试,识别实时性满足实际使用要求. 本文以综合工况中实际采集到的一段数据为识别对象,根据上述识别方法对综合工况进行识别,识别结果如图10所示.对综合工况采用不同的控制策略进行仿真计算,结果如表6所示.其中IMP为采用不同控制策略时,其百公里油耗值相对于内燃机车辆减少的幅度.由于上述综合工况中有接近2/3的工况为顺畅工况和高架工况,内燃机车辆有较好的燃油经济性,油耗为5.9 L/100 km.当采用传统的规则控制策略时车辆的燃油经济性相对于内燃机车辆提升了16.1%;当采用拥堵工况的新规则控制策略时,燃油经济性比内燃机车辆还要差,因为设定的控制策略中只在需求功率较小时使用纯电动模式,绝大部分时间发动机都处于启动状态.当采用顺畅工况的新规则控制策略和高架工况的新规则控制策略时,燃油经济性和内燃机车辆相比分别提高了10.3%和9.8%,但是仍然比传统规则控制策略的燃油经济性差;而增加工况识别后车辆燃油经济性是最优的,比内燃机车辆提高了35.6%,比传统的规则控制策略提高了23.2%.以上分析说明单个的新规则控制策略并不能使得所有工况都获得较好的燃油经济性,但是通过增加工况识别可以弥补这个缺陷,从而获得更好的燃油经济性. 表6 综合工况下采用不同控制策略的百公里油耗 Tab.6 Fuel consumption per hundred kilometers of different strategies under comprehensive driving condition 控制策略Q/(L·100km-1)IMP/%ICEV传统规则5.904.95-16.1新规则顺畅工况5.2910.3高架工况5.329.8拥堵工况8.45-43.2增加工况识别3.8035.6 图10 采用学习向量量化神经网络对综合工况的识别结果Fig.10 Recognition results of comprehensive driving condition by learning vector quantization neural network (1)与内燃机车辆相比,双轴驱动混合动力车辆在采用传统的规则控制策略时可以使得车辆在拥堵工况下的燃油经济性提高59.6%,但是在快速路和高架工况下提高较少.采用动态规划算法可以得到车辆在各个循环工况下理论最大的燃油经济性. (2)对动态规划算法中的决策变量进行简化可以减少计算量,并简化提取规则.通过对动态规划的仿真结果进行分析,可以提取出新规则控制策略.与传统的规则控制策略的仿真结果相比,新规则控制策略可以使得车辆在对应的循环工况下获得更好的燃油经济性,与动态规划控制结果的差距在10.0%左右. (3)在综合工况下,采用单一的新规则控制策略并不能获得理想的燃油经济性效果;而采用工况识别后,其燃油经济性可比内燃机车辆提高35.6%,比采用传统的规则控制策略提高23.2%. (4)本文的研究结果为杭州市内双轴驱动混合动力车辆在循环工况条件下的能量管理策略的制定提供了理论依据. [1] ZHANG X,MI C.车辆能量管理:建模、控制与优化[M].张希,米春亭,译.北京:机械工业出版社,2013: 12-17. [2] 刘希玲,丁焰.我国城市汽车行驶工况调查研究[J].环境科学研究,2000,13(1):23-27. LIU Xi-ling, DING Yan. Chinese research academy of environmental sciences [J]. Research of Environmental Sciences, 2000, 13(1): 23-27. [3] 王楠楠.城市道路行驶工况构建及油耗研究[D].合肥:合肥工业大学,2012: 26-46. WANG Nan-nan. Construction of the urban road driving cycle and research of the fuel consumption [D]. Hefei: Hefei University of Technology, 2012: 26-46. [4] 董恩源,颜文胜,申江卫,等.聚类分析法在城市公交行驶工况开发中的应用[J].昆明理工大学学报:自然科学版,2013,38(5): 41-45. DONG En-yuan, YAN Wen-sheng, SHEN Jiang-wei, et al. Application of cluster to development of city bus driving cycle [J]. Journal of Kunming University of Science and Technology: Natural Science Edition, 2013,38(5): 41-45. [5] KARANDE S, OLSON M, SAHA B. Development of representative vehicle drive cycles for hybrid applications [C] ∥ SAE 2014 World Congress and Exhibition. Michigan: SAE, 2014: 1900-1907. [6] 姜平,石琴,陈无畏,等.基于小波分析的城市道路行驶工况构建的研究[J].汽车工程,2011,33(1): 70-73. JIANG Ping, SHI Qin, CHEN Wu-wei, et al. A research on the construction of city road driving [J]. Automotive Engineering, 2011, 33(1): 70-73. [7] PHILLIPS A M, MCGEE R A, LOCKWOOD J T, et al. Control system development for the dual drive hybrid electric truck [J]. SAE International Journal of Engines, 2009, 2(1): 114-122. [8] SANGJOON K, JOONYOUNG P, JEONGHO H, et al. Transient control strategy of hybrid electric vehicle during mode change [C] ∥ SAE 2009 World Congress and Exhibition. Michigan: SAE, 2009: 67-73. [9] 杜爱民,冯旭云.双轴驱动混合动力汽车能量管理策略仿真[J].同济大学学报,2006,34(6): 800-804. DU Ai-min, Feng Xu-yun. Simulation on energy management strategy for 4 wheel-drive hybrid electric vehicle [J]. Journal of Tongji University, 2006,34(6): 800-804. [10] 马东兵.四轮驱动混合动力汽车控制策略仿真与测试[D].上海:上海交通大学,2013: 29-39. MA Dong-bing. Simulation and test on the control strategy for four-wheel drive hybrid electric vehicle [D]. Shanghai: Shanghai Jiao Tong University, 2013: 29-39. [11] 李晓甫.桥间分配四驱混合动力电动汽车能耗优化控制策略研究[D].广州:华南理工大学,2012: 61-104. LI Xiao-fu. Study of energy consumption optimal control strategy for axle-split 4WD hybrid electric vehicle [D]. Guangzhou: South China University of Technology, 2012: 61-104. [12] 曾小华,王庆年,王伟华,等.基于ADVISOR软件的双轴驱动混合动力汽车性能仿真模块开发[J].汽车工程,2003,25(5): 424-427. ZENG Xiao-hua, WANG Qing-nian, WANG Wei-hua, et al. The development of a simulation module for the performance of two-axle drive HEV based on ADVISOR software [J]. Automotive Engineering, 2003,25(5): 424-427. [13] BANVAIT H, ANWAR S A. Rule-based energy management strategy for plug-in hybrid electric vehicle (PHEV) [C] ∥ 2009 American Control Conference. Missouri: AACC, 2009: 3938-3944. [14] FIORENZA S, LANZAFAME R, MESSINA M.Analysis of rules-based control strategies for integrated starter alternator vehicles [C] ∥ 2008 World Congress of SAE. Michigan: SAE, 2008:1314-1325. [15] BETSEKAS D P. Dynamic programming and optimal control [M]. 3th ed. Massachusetts: Massachusetts Institute of Technology, 2005. [16] LIN C C, PENG H. Power management strategy for a parallel hybrid electric truck [J]. IEEE Transactions Control Systems Technology, 2003, 11(6): 1-10. [17] KULIKOV I A, BAULINA E E, FILONOV A I. Optimal control of a hybrid vehicle’s powertrain minimizing pollutant emissions and fuel consumption [C] ∥ SAE 2014 Commercial Vehicle Engineering Congress.Illinois: SAE,2014: 2372-2376. [18] MURPHEY Y L, CHEN Z H, KILIARIS L, et al. Neural learning of driving environment prediction for vehicle power management [C]∥ 2008 International Joint Conference on Neural Networks. Hong Kong: IEEE, 2008: 3755-3760. [19] TIAN Y, ZHANG X, ZHANG L, et al. Intelligent energy management based on driving cycle identification using fuzzy neural network [C]∥ 2009 Second International Symposium on Computational Intelligence and Design. Hunan: IEEE, 2009: 501-504. [20] 田毅.电动汽车运行状态识别及HEV控制策略研究[D].北京:北京交通大学,2010: 25-80. TIAN Yi. The research of electric vehicle driving situation identification and HEV control strategy [D]. Beijing: Beijing Jiao Tong University, 2010: 25-80. Energy management strategy of dual drive hybrid electric vehicle JIANG Dong-dong, LI Dao-fei, YU Xiao-li (InstituteofPowerMachineryandVehicularEngineering,ZhejiangUniversity,Hangzhou310027,China) The dual drive hybrid electric vehicle (DDHEV) was modeled and the Hangzhou driving cycles were constructed. The new rule based control strategy was extracted from the simulation results of the dynamic programming control strategy; the fuel-saving effect of the new rule based control strategy was evaluated. Results show that the fuel economy increases by 35.5% under the congestion driving cycle, by 24.9% under the smooth driving cycle and by 4.8% under the elevated highway driving cycle, respectively, compared with the traditional rule-based control strategy. To improve the adaptability of the new rule-based control strategy under different driving cycles, the learning vector quantization neural network was used to identify the comprehensive driving cycles; the control strategy parameters were adjusted according to the recognition results. Results indicate that, compared with a single new rule-based energy management strategy, the fuel economy increases by at least 28.2% under the comprehensive driving cycle with the new rule-based energy management strategy parameters adjusted by driving cycle’s recognition. The proposed approach can meet the practical application demand of the dual drive hybrid vehicles; the vehicle fuel economy is also improved. dual drive hybrid electric vehicle (DDHEV); driving cycle construction; energy management; rule extraction; driving mode recognition 2015-12-07. 国家自然科学基金资助项目(51205345);中央高校基本科研业务费专项资金资助项目;能源清洁利用国家重点实验室自主课题(ZJUCEU2016005);浙江省重点科技创新团队计划资助项目(2011R50008);浙江省教育厅科研资助项目(Y201121739). 江冬冬(1991—),男,博士生,从事车辆能量管理、智能驾驶研究.ORCID:0000-0001-9471-1775. E-mail:jiangdongdong@zju.edu.cn 通信联系人:李道飞,男,副教授.ORCID:0000-0002-6909-0169.E-mail:dfli@zju.edu.cn 10.3785/j.issn.1008-973X.2016.12.001 U 469. 72 A 1008-973X(2016)12-2245-09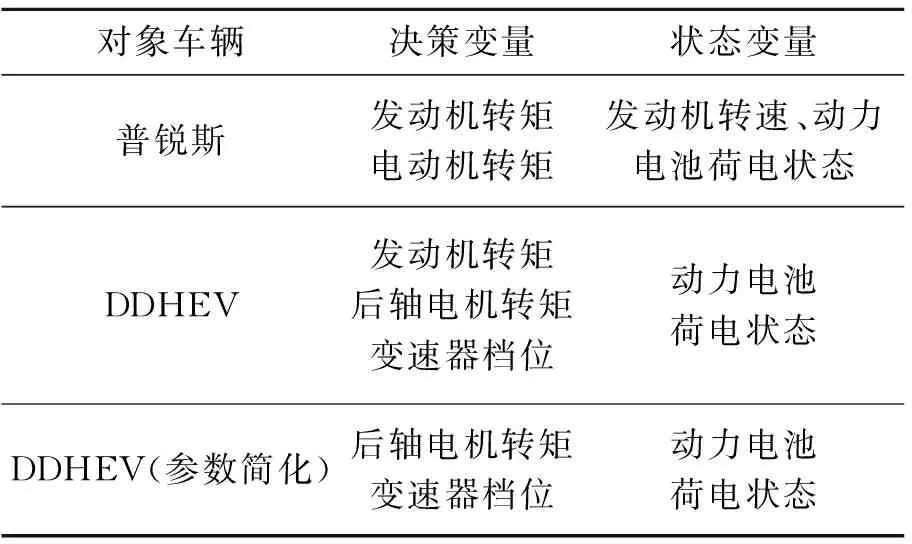



4 工况识别


5 结 论
