一种数字阵列雷达幅相监测校准的新方法
2016-01-23李赛辉蒋迺倜中国船舶重工集团公司第七二四研究所南京211153
宋 虎,李赛辉,刘 剑,蒋迺倜(中国船舶重工集团公司第七二四研究所,南京211153)
一种数字阵列雷达幅相监测校准的新方法
宋虎,李赛辉,刘剑,蒋迺倜
(中国船舶重工集团公司第七二四研究所,南京211153)
摘要:数字阵列雷达是一种接收和发射波束都以数字方式实现的全数字相控阵雷达。基于远场外监测原理,研究了数字处理的幅相误差校准方法,并探讨提出一种基准数据和中场监测相结合的阵地级校准方法。试验结果表明,本文提出的方法可以得到精度很高的校准数据,经校准后的天线波束可以满足数字阵列雷达的要求。基于基准数据和中场监测相结合的方法是一种探索,是数字阵列雷达阵地级校准的简单、易行、有效的方法。
关键词:数字阵列雷达;幅相误差;监测与校准
0 引言
数字阵列雷达集成了阵列技术和数字技术的优点,可有效地提升雷达的性能,满足日益增长的对雷达的需求。相对于传统相控阵来说,它具有巨大的优势:易于实现超低副瓣,大的动态范围,波束扫描速度快,可同时多波束等。为了解决舰载雷达在近海作战时复杂环境下小目标的检测问题,美国海军在2000年开展了DAR(Digital Array Radar)雷达的研究,并完成了L波段96个单元的实验样机系统[1]。国内在数字阵列雷达系统及关键技术方面也进行了大量的研究和试验[2]。
数字阵列的制造和安装位置误差、发射和接收通道存在幅相误差等,均会对天线的副瓣电平、增益和波束指向造成影响。为了确保天线方向图符合天线性能指标要求,有源相控阵天线必须校准。不同于传统的相控阵雷达,数字阵列雷达采用数字波束形成技术实现发射和接收的波束,校准处理也采用数字的方法,具有波束形成灵活、校准精度高等优点。本文研究数字阵列雷达的校准方法和波束形成实时实现技术,并进行实际试验验证。
1 幅相误差对天线性能的影响
一个典型的数字阵列雷达组成如图1所示,一般由阵列辐射单元、数字发射/接收(T/R)组件、数据传输系统、数字处理机等组成。其中数字T/R组件模块是数字阵列雷达的核心,它把发射机、接收机、激励器和本振信号发生器集为一体,成为一个完整的发射和接收机分系统。这里将阵列辐射单元和数字T/R组件组成的系统称为天线。
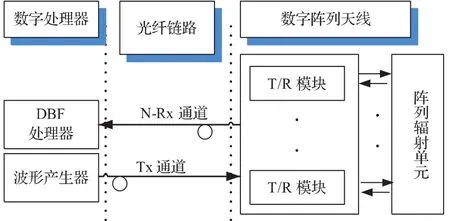
图1 数字阵列雷达典型组成架构
任何雷达在设计过程中都会产生各种误差,对于数字阵列雷达,其主要误差可认为来自两部分:阵列天线单元和数字T/R组件。阵列天线中的误差包括天线阵元互耦、天线阵元的位置误差等。数字阵列雷达一般包括许多个T/R组件,每个T/R组件都是一个独立的通道,其中包括了功率放大器、低噪声放大器、混频器、滤波器、模/数转换器等部件。这些器件及其构成的有源电路不可避免地存在着幅度和相位的差异,使得发射通道和接收通道间产生幅度和相位不一致。而且系统由于时间、温度、环境的改变及器件的老化也会引起各通道特性不一致。任何误差都将转化为通道的幅相误差,对数字波束形成产生不良影响,比如会引起波束主瓣变宽、旁瓣抬高、自适应置零深度抬高等问题。
Allen[3]就随机幅相误差对天线的均方根副瓣电平作过详细的分析。使用的单元数目越少,误差容限就越严格。本文考虑某S波段线阵,32单元,间距半波长,进行不同幅相误差情况下的仿真,分析幅相误差对最大副瓣电平、均方根副瓣电平等的影响。仿真时,考虑波束形成控制系数不加权、Taylor加权30 dB、Taylor加权40 dB三种情况,分别进行100次Monter Carlo仿真。图2是不加权的情况下没有幅相误差、幅度误差0.3 dB(RMS)相位误差4°(RMS)和幅度误差0.6 dB(RMS)相位误差10°(RMS)的方向图。图3是 Taylor加权30 dB的情况下,没有幅相误差、幅度误差0.3 dB(RMS)相位误差4°(RMS)和幅度误差0.6 dB(RMS)相位误差10°(RMS)的方向图。图4是Taylor加权40 dB的情况下,没有幅相误差、幅度误差0.3 dB(RMS)相位误差4°(RMS)和幅度误差0.6 dB(RMS)相位误差10°(RMS)的方向图。从图中可以看出,由于幅相误差的引入,致使天线方向图发生变化,其显著特点之一是方向图的副瓣电平抬高。

图2 不同幅相误差下的方向图(不加权)

图3 不同幅相误差下的方向图(30 dB Taylor加权)
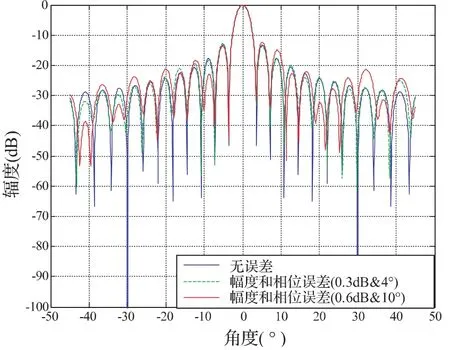
图4 不同幅相误差下的方向图(40 dB Taylor加权)
在表1、表2、表3中统计给出了3种情况下的最大副瓣电平、均方副瓣电平和平均副瓣电平。对表1 ~3的分析,在没有加权的情况下,均方副瓣电平恶化0.9 dB;在Taylor 30 dB加权时,均方副瓣电平恶化6.2 dB;在Taylor 40 dB加权时,均方副瓣电平恶化15 dB。可见,要获得低副瓣,对幅相一致性要求更高。获得天线低副瓣电平一直是系统设计所追求的目标之一,数字阵列雷达在波束形成时一般采用加权抑制副瓣。所以,为了得到低的理想副瓣,必须对阵列天线的幅相误差进行校准。

表1 不同幅相误差情况下的副瓣电平(不加权)
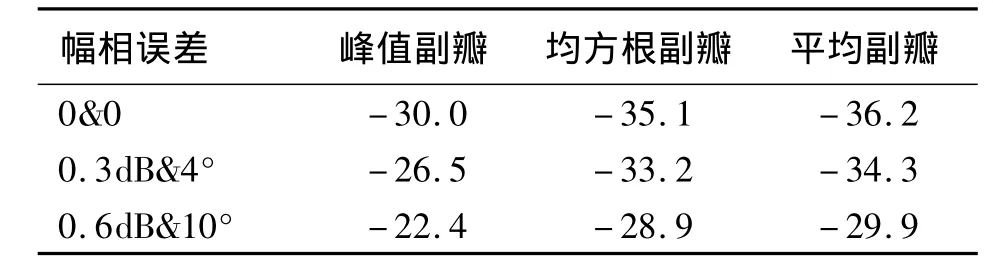
表2 不同幅相误差情况下的副瓣电平(30 dB Taylor加权)
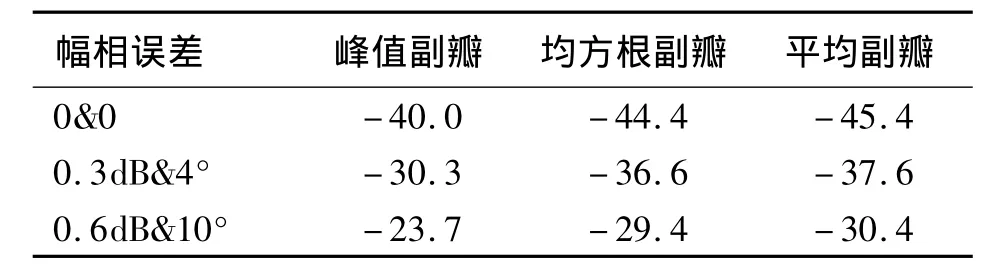
表3 不同幅相误差情况下的副瓣电平(40 dB Taylor加权)
2 数字阵列天线监测校准技术
数字阵列雷达接收和发射信号都在靠近阵列天线端数字化,并且发射和接收都采用数字波束形成技术,控制波束的权值或时间延迟都是在基带形成的。这样处理的前提条件是假设各通道内传输是无失真的以及各阵元通道的频率特性是一致的。只有这样才能保证基带处理时各阵元信号的幅度和相位关系与在天线端的信号的幅度和相位关系是一样的,但实际通道不可能满足这种要求。在上一节分析了数字阵列雷达中的幅相误差会对雷达性能的影响。为减少通道误差对数字波束形成的性能影响,必须对通道进行校准。根据测量信号注入或获取点的不同,有源相控阵天线校准的方法分为两种:内监测和外监测[4]。内外监测的方法各有特点,内监测的结果不包括天线单元及其互耦作用,所监测到的幅相数据与实际的数据有一定的差别。考虑到校准的精度、设备量、应用场合等,首先研究基于远场的外监测方法,然后提出适用于工程实现的阵地级校准方法。
远场外监测方法是指在距离数字阵列天线满足远场条件的地方放置监测装置(一般含辐射器、信号源等)。用该监测装置完成数字阵列天线发射通道和接收通道的校准,如图5所示。远场校准一般在满足电磁环境要求的天线测试外场进行,这时不需要知道校准源的精确位置,只需知道相对数字阵列天线的方向即可。

图5 远场监测校准示意图
对于有源阵列,在发射和接收两种模式下,为了确定每个阵元的校准常数,必须对每个单元的幅度和相位进行测量。
发射通道在远场校正时,将每个通道的信号通过天线向空间辐射,把远场接收到的信号与参考信号相比较,就可以得到每个发射通道的幅相误差。将发射通道的幅相误差补偿到数字基带信号上就可修正各发射通道的幅相误差。
接收通道在远场校正时,将监测信号从远场发射,所有通道同时接收处理后分析得出每个接收通道的幅相误差。在DBF时,通过修正波束控制权值,消除接收通道的误差。
一旦有源相控阵被部署,为保持天线性能在指标范围内,必须实施阵地级校准。在实际数字阵列雷达装载到平台以后,如舰载雷达,一般很难找到满足远场条件的监测装置安装的位置来进行阵地级校准。利用放置在阵列外围区域的前面或侧面监测天线,这时监测天线的位置一般为介于近场和远场的中场,如图6所示。中场监测一个重要的问题是需要知道监测天线相对于每个阵元的精确位置,经过复杂的计算,才能得出监测天线和每个阵元的信号关系,而且测量出的位置关系一般很难满足对幅相误差校准的要求。为了解决这个问题,在天线测试外场,综合利用远场和中场的测量方法得出基准数据,再在阵地级校准中使用。假设远场测量方法得出一组数据D1,计算得出校准数据A1和φ1;中场测量方法得出一组数据D2,由于是对同一天线同一时间进行的测量,这时中场校准数据也是A1和φ1。将D2、A1和φ1数据存储下来,成为基准数据。在阵地级校准时,将实际测量数据D2'和基准数据D2比较,就可以得出幅度和相位相对于基准数据A1和φ1的变化,从而得到阵地需要的校准数据A1'和φ1'。在实际中,根据雷达的频率范围分成很多段,将对应频率的校准数据存成表格,供阵地校准时使用。在数字阵列中,采用数字的方法进行校准处理,可以达到很高的精度,从而校准后的天线能很好地满足性能指标的要求。
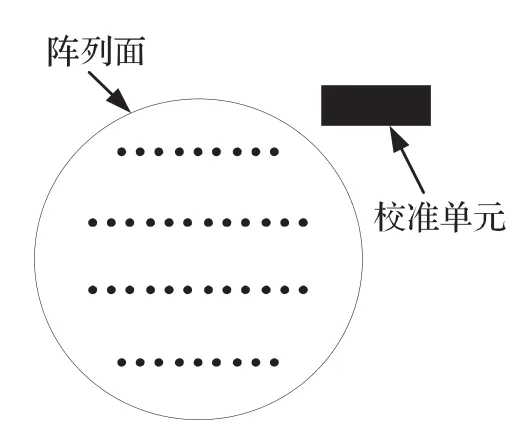
图6 中场校准方法示意图
3 试验及结果
为了验证数字阵列校准和波束形成技术,搭建了试验系统。试验系统由S波段的32阵元线阵、数字T/R组件,监测电路、波束形成器、远场校准装置等组成。远场校准装置位于线阵前方90 m。这里重点讨论接收通道的校准及试验结果。
在实验室测量得到32个数字T/R组件接收通道的幅度相位关系,然后经远场校准方法得到整个阵列天线通道(含天线单元、数字T/R组件等)的幅相关系。仅32个T/R通道和整个阵列天线通道的幅度误差如图7所示,相位误差如图8。远场监测得到的幅相误差数据存成表作为基准数据,供校准用。
得到基准校准数据后,利用某位置外场辐射源再次进行辐射,采集32个通道的基带数据并在FPGA处理板中进行波束形成。波束形成时考虑不修正和利用外场监测结果作为基准数据修正两种情况。波束形成不加权时得到的对比结果如图9所示。经统计,修正之前的MSSL为-20.6,修正之后的MSSL为-23.8。波束形成Taylor加权30 dB时得到的对比结果如图10所示。经统计,修正之前的MSSL为-21.1,修正之后的MSSL为-33.8。可以看出,经过校准,明显改善了波束的副瓣等特性。利用远场外监测的方法可以快速地得到精度很高的幅相基准数据,经补偿处理后可以满足数字阵列天线波束图的要求。远场监测得到的基础数据为中场监测的阵地级校准奠定了基础。

图7 原始的幅度误差

图8 原始的相位误差
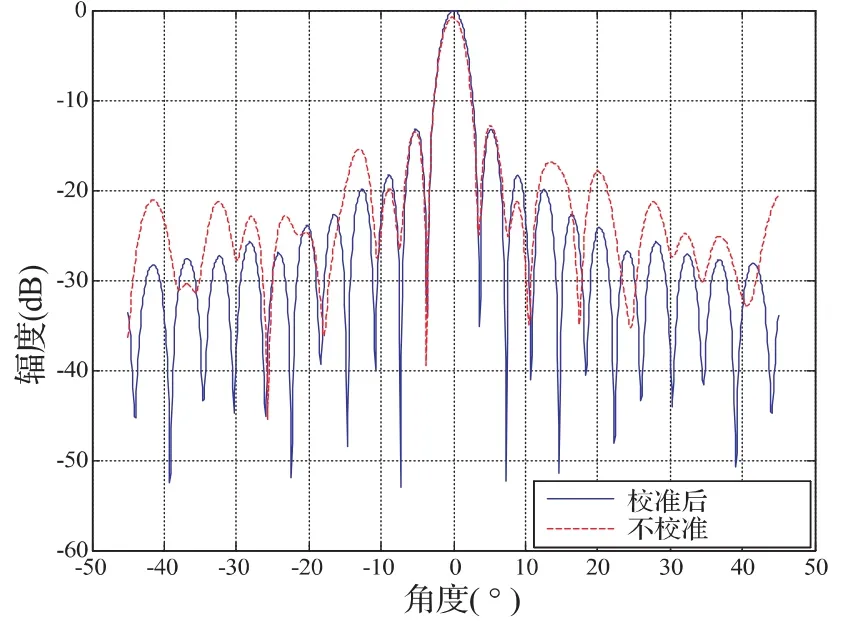
图9 校准与不校准的波束形成结果对比(不加权时)
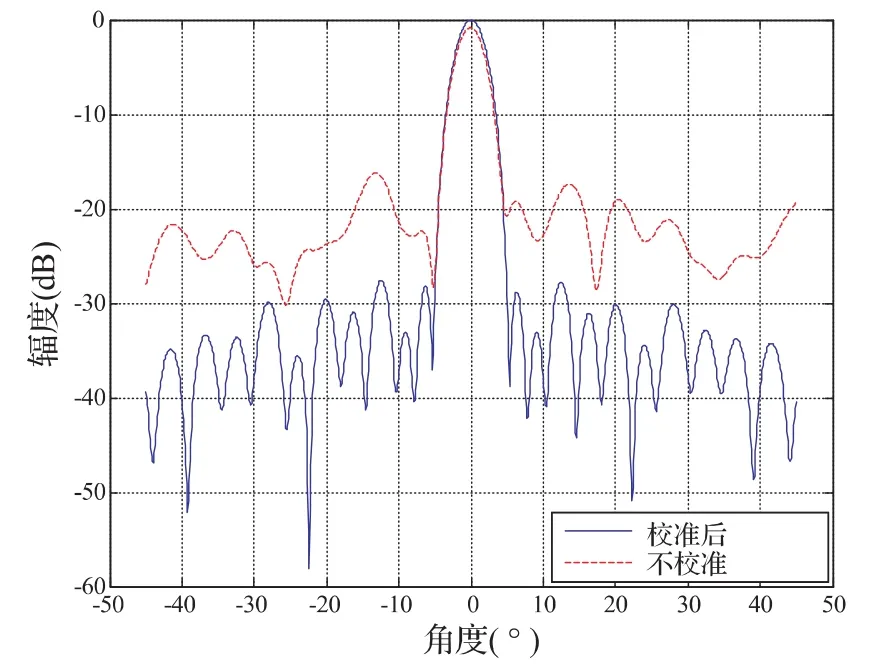
图10 校准与不校准的波束形成结果对比(30dB Taylor加权)
4 结束语
大量的仿真计算结果表明,幅相误差对数字阵列天线性能的影响非常大。试验表明,采用基于远场外监测的方法可以有效地得到精度很高的幅相误差基准数据,并进行天线校准,从而改善天线性能,满足数字阵列雷达对波束的要求。基于基准数据和中场监测相结合的校准方法的探索可以满足雷达部署后的阵地级校准,从而保证雷达全生命周内的性能。
参考文献:
[1]B Cantrell,J de Graaf.Development of a Digital Array Radar(DAR)[J].IEEE Aerospace and E-lectronic Systems Magazine,2002(17):22-27.
[2]吴曼青.数字阵列雷达及其进展[J].中国电子科学研究院学报,2006(1):11-16.
[3]Merrill I.Skolnik.Radar Handbook[M].3rd ed.McGraw-Hill,2008:504-505.
[4]吴祖权.有源相控阵雷达阵面监测方法及其实验研究[J].现代雷达,1998(5):1-7.
A new amplitude-phase error monitoring and calibration method of digital array radar
SONG Hu,LI Sai-hui,LIU Jian,JIANG Nai-ti
(No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:The digital array radar(DAR)is a fully digitized phased array radar in which the DBF technique is used both in receive and transmit.Based on the far-field external monitoring principle,the amplitude-phase error calibration method of the digital processing is studied,and the“in-thefield calibration”method,combining the reference data and the mid-field monitoring,is finally presented.The test results show that the high-precision calibration data can be obtained and the antenna beams after calibration can meet the requirements of the DAR through the method proposed.This new method which combines the reference data and the mid-field monitoring is a simple,feasible and effective method for the DAR in the field calibration.
Keywords:digital array radar; amplitude-phase error; monitoring and calibration
文章编号:1009-0401(2015)01-0029-05
文献标志码:A
中图分类号:TN958.92
作者简介:宋虎(1980-),男,高级工程师,硕士,研究方向:雷达信号处理及雷达系统技术;李赛辉(1984-),男,工程师,硕士,研究方向:雷达信号处理技术;刘剑(1983-),男,工程师,硕士,研究方向:雷达信号处理技术;蒋迺倜(1984-),男,工程师,硕士,研究方向:雷达信号处理技术。
收稿日期:2015-01-20
