新的变步长LMS算法在系统辨识中的应用
2016-01-21张炳婷赵建平马淑丽
张炳婷,赵建平,马淑丽
(曲阜师范大学 物理工程学院,山东 曲阜 273165)
摘 要:在分析最小均方误差(LMS)自适应滤波算法和变步长LMS算法的基础上,提出了一种新的变步长算法,该算法用误差的平均值来控制步长的变化,进一步的解决了收敛速度和稳态误差的矛盾。讲述了新算法的具体改进方式,并将该算法和变步长G-SVSLMS算法以及固定步长算法分别应用到系统辨识中,通过MATLAB进行仿真,结果证实文中提出的算法在明显提高收敛速度的同时,并拥有好的稳态误差。
关键词:LMS算法;变步长;系统辨识;收敛速度
doi:10.3969/j.issn.1002-0802.2015.06.005
新的变步长LMS算法在系统辨识中的应用
张炳婷,赵建平,马淑丽
(曲阜师范大学 物理工程学院,山东 曲阜 273165)
摘要:在分析最小均方误差(LMS)自适应滤波算法和变步长LMS算法的基础上,提出了一种新的变步长算法,该算法用误差的平均值来控制步长的变化,进一步的解决了收敛速度和稳态误差的矛盾。讲述了新算法的具体改进方式,并将该算法和变步长G-SVSLMS算法以及固定步长算法分别应用到系统辨识中,通过MATLAB进行仿真,结果证实文中提出的算法在明显提高收敛速度的同时,并拥有好的稳态误差。
关键词:LMS算法;变步长;系统辨识;收敛速度
doi:10.3969/j.issn.1002-0802.2015.06.005
收稿日期:Received date:2015-01-18;Revised date:2015-04-29
基金项目:山东省自然科学基金资助(No.ZR2014FM011) Foundation Item:Natural Science Foundation of Shandong Province (No.ZR2014FM011)
中图分类号:TN929.5
文献标志码:码:A
文章编号:号:1002-0802(2015)06-0653-04
Abstract:Based on analysis of LMS (Least Mean Square Error) adaptive filtering algorithm and variable step size LMS algorithm, a novel variable step algorithm is proposed. The error mean of this algorithm is used to control the step variation, and further to mitigate the contradiction of between convergence rate and steady-state error. The specific improved method to modify the novel algorithm is described, and the proposed algorithm, variable step size G-SVSLMS algorithms and fixed-step algorithm are respectively applied to the system identification. Simulation with MATLAB indicates that this algorithm could significantly improve convergence rate while having a fair steady-state error.
作者简介:
Application of Novel Variable Step Size LMS Algorithm
in System Identification
ZHANG Bing-ting,ZHAO JIAN-ping,MA SHU-Li
(College of Physics Engineering ,Qufu Normal University , Qufu Shandon 273165,China )
Key words:LMS algorithm; variable step size; system identification; convergence rate
0引言
最小均方误差LMS(Least Mean Square)算法最早是由Windrow和Hoff提出的[1],是在维纳滤波器的基础上建立的,以最小均方差准则下,运用最速下降法来获得最优的维纳解。其主要过程就是通过调整自适应滤波器的权系数,使滤波器的输出信号和期望信号之间的误差最小。自适应滤波器根据提取期望响应的不同,又分为系统辨识、干扰消除、预测和信道均衡四种应用。LMS算法凭借其计算量小、结构简单,被广泛的用于自适应控制、信号处理等多种工程领域[2]。其中收敛速度和稳态误差是衡量该算法的两个重要标准,然而LMS算法的收敛速度和稳态误差间存在矛盾[3]。具体来说算法的收敛速度主要受迭代步长的影响,在迭代步长满足算法的收敛条件时,步长越大,收敛速度加快,但同时会带来较大的稳态误差;反之,要想有较小的稳态误差,就必须采用小的迭代步长,但同时降低了收敛速度。为了解决这一矛盾,众多的学者提出了各种变步长算法,改进的算法主要有两个方向,一个方向是利用误差信号来进行步长迭代,另一方向是利用梯度向量来进行步长迭代[4]。目的都是为了在算法的出收敛阶段,采用大的步长,加快收敛速度,等到收敛稳定后,采用小的步长,来降低稳态误差。
1LMS算法
1.1传统的LMS算法
最小均方误差(LMS)算法,它是以期望响应和滤波器输出信号之间误差的均方最小值为准则,并使用误差来控制自适应滤波器的权系数,是最终输出的权系数达到最佳的权系数。LMS算法的表达式:
y(n)=w(n)Tx(n)
(1)
e(n)=d(n)-y(n)
(2)
w(n+1)=w(n)+ue(n)x(n)
(3)
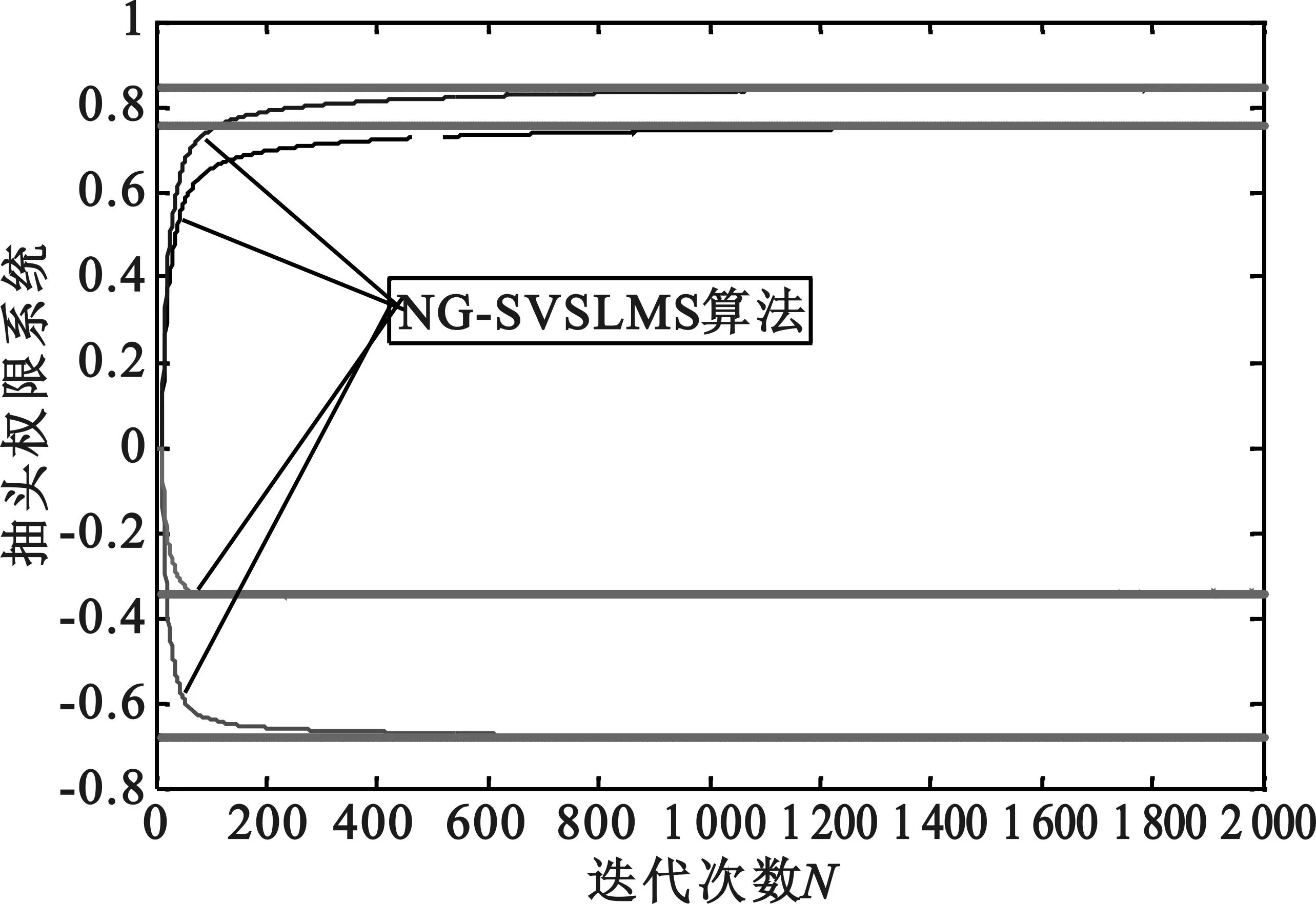
式中,x(n)是输入信号,d(n)是期望响应的输出信号,y(n)是实际输出的信号,w(n)是滤波器的抽头系数。e(n)是误差信号。式(3)是抽头权向量的递推公式,u是步长因子,当满足0 J(n)=E{|e(n)|2}=E{|d(n)-y(n)|2} (4) 即使滤波器的输出信号与期望信号之间的误差最小。并以此稳态误差作为衡量LMS算法的性能。在满足收敛条件下,u越大,收敛速度越大,相应的稳态误差也越大;u越小,稳态误差小,但相应的收敛速度也小。 稳态误差和收敛速度是衡量算法收敛性能的两个重要标准,为了获得好的稳态误差和快的收敛速度,对于迭代步长的调整最为关键,所以人们提出来变步长算法,在算法的收敛阶段,采用大的迭代步长,获取较快的收敛速度,等算法达到稳态后,采用小的迭代步长来减小稳态误差。 1.2变步长算法 本文研究的变步长算法,是利用误差信号进行迭代,建立误差信号与迭代步长的某种函数关系,在文献[5]中提出的基于G-SVSLMS函数的变步长算法,该算法的表达式: w(n+1)=w(n)+u(n)e(n)x(n) (5) 式(5)中u(n)=β(1-exp(-α|e(n)|2)),β控制步长函数的取值范围,α控制步长函数的形状。算法的输出信号和误差信号的表达式如式(1)、式(2)。该算法具有较小的稳态误差和较快的收敛速度。并且在误差信号e(n)接近零时具有变化缓慢的特性。但是在外界噪声严重的情况下,步长函数u(n)中的e(n)容易受到外界噪声的影响,使u(n)不能达到最小的值,从而使抽头系数只是无限地的接近最优解,不能达到最优的维纳解。针对这种算法的不足之处,在文献[6]中提出的一种新的改进算法,就是在步长函数中不直接使用误差信号e(n)的平方,而是使用前一时刻的误差信号e(n-1)与当前时刻的误差信号e(n)的乘积即e(n-1)e(n)来代替,降低了G-SVSLMS算法对噪声的敏感度,该算法记为NG-SVSLMS算法。 NG-SVSLMS算法的步长函数表达式: u(n)=β(1-exp(-α|e(n)e(n-1)|)) (6) 该算法在低信噪比下有低的稳态误差,但是收敛速度不十分理想。 2本文提出的算法 本文提出的算法在G-SVSLMS基础上结合块自适应滤波器文献[7]中的块平方误差的思想,利用前面所有时刻的误差信号与当前时刻误差信号的平均值记为eav(n),来建造与步长的函数关系。 表达式如下式 u(n)=β(1-exp(-α|eav(n)|)) (7) (8) 图1本文算法的步长随迭代次数的变化 3算法在系统辨识中的应用分析 3.1系统辨识的分析 系统辨识是根据系统的输入与输出信号,建立系统模型的理论和方法。当给定一个未知的系统时,通过自适应滤波器可以逼近这个系统,进而得到这个动态系统,从而达到系统辨识的目的[8],下面给出改进的LMS算法在系统模型辨识中的应用实例,其中算法的收敛速度是衡量算法的重要标准。图2是系统辨识的原理图。 图2 系统辨识原理框 假设自适应滤波器的阶数与未知系统的阶数相同,输入随机信号为x(n),对未知系统测量得到的输出信号是,d(n)它是由未知系统的输出信号y(n)与噪声信号v(n)叠加,其中噪声信号是测定的高斯白噪声,并且与输入信号不相关。在图中y∧(n)是自适应滤波器的输出,它与对未知系统的输出信号d(n)间的差值是误差信号e(n)。新的算法在系统辨识中的表达式: (9) d(n)=y(n)+v(n) (10) y∧(n)=WT(n)X(n) (11) e(n)=d(n)-y∧(n) (12) u(n)=β(1-exp(-α|eav(n)|)) (13) 通过以上的算法,通过公式进行迭代运算,当e(n)趋近于零时,自适应滤波器的权系数即是未知系统的滤波器系数,从而达到系统辨识的目的。 3.2不同算法的分析 将本文的算法、固定步长的LMS算法和NG-SVSLMS算法应用到图中的系统辨识模型,定义系统辨识中的未知系统是8阶的横向滤波器,滤波器的抽头系数Hn=[0.878 3-0.580 60.653 7-0.322 30.657 7-0.058 20.289 5-0.271 0]。测量的输入信号与测量的噪声信号的信噪比设置为20 dB。在比较三种算法的性能优劣时,将具体的参数定义如下:固定步长的LMS算法中,步长u设置为0.01,为了更好地对另外两种变步长算法性能的比较,将其中的参数定为相同的数值,β=0.08、α=0.8,每种算法独立做200次仿真,然后对其求平均值,得到的仿真结果如图3所示。 图3 三种算法的收敛曲线比较 从图3中可以清楚地看到,在相同的信噪比下,文献[6]中的NG-SVSLMS算法,要比固定步长算法的收敛速度快,但在一定程度上增加了稳态误差,而本文中提出的算法,与这两种算法相比,收敛速度要优于固定步长LMS算法和NG-SVSLMS算法。本文中的算法在经过50次迭代时,均方误差就已经达到最小值,在没有增加稳态误差的前提下,同时提高了收敛速度。固定步长LMS算法的收敛速度要比NG-SVSLMS算法和本文算法的收敛速度小,其主要原因就是在算法收敛的初始阶段,它的步长是最小的且是固定的,这与前面图2中步长随迭代次数变化时推出的结论一致,证明了本文的算法实施的正确性和高的性能。 为了进一步的验证本文算法的收敛速度要快于其他两种算法,分别选取系统辨识中FIR滤波器的前4个系数[0.878 3-0.580 60.653 7-0.322 3],将其进行仿真比较。结果见图4、图5、图6。 图4固定步长LMS算法的系统辨识结果 图5 NG-SVSLMS算法的系统辨识结果 图6 本文算法的系统辨识结果 通过比较可以清楚地看到本文算法辨识的结果最先与理论上的系数相同。因此仿真证实,在系统辨识的应用中,本文提出的算法的收敛速度要明显的比固定步长算法、NG-SVSLMS算法快,而且相应的稳态误差也十分的稳定。 4结语 文中在固定步长LMS算法的基础上,分析了变步长G-SVSLMS算法及改进的NG-SVSLMS算法,结合时域上的块步长算法的思想,提出了一种新的变步长算法,用不同时刻的误差的均值来控制步长的变化。仿真结果证明,在系统辨识的应用中,本文提出的算法加快了算法的收敛速度,要优于现有的算法。但是没有大幅度的减小稳态误差,需要进一步的研究改进。在接下来的研究当中,会对本文的算法进一步的改进,并在硬件当中进行实施。 参考文献: [1]WIDROW B, MCCOOL J M, ARIMOER M G. Stationary and No Stationary Learning Characteristic of the LMS Adaptive Filter[J],ProcIEEE,1976,64(8):1151-1162. [2]聂聪,吕振肃.一种新的变步长NLMS自适应算法[J].通信技术,2007,40(12):87-89. NIE Cong, LV Zhen-Su. A New Variable Step Size NLMS Adaptive Algorithm[J].Communications Technology, 2007,40(12):87-89. [3]吴怡.基于LMS算法的语音增强系统的研究[D].北京:北京邮电大学,2011. WU Yi. A Speech Enhancement based on LMS Algorithm[D].Beijing: Beijing University of Posts and Telecommunications,2011. [4]李宁. LMS自适应滤波算法的收敛性能研究与应用[D].哈尔滨:哈尔滨工程大学,2009. LI Ning. Convergence Performance Analysis and Application of the Adaptive Lease Mean Square Algorithm [D].Harbin: Harbin Engineering University, 2009. [5]高鹰,谢胜利.一种变步长LMS自适应滤波算法及分析[J].电子学报,2001,29(08):1094-1097. GAO Ying, XIE Sheng-li. A Variable Step Size LMS Adaptive Filtering Algorithm and Its Analysis [J].Act Electronic Sinica,2001,29(08):1094-1097. [6]吕强,冯驰.一种变步长LMS算法及其Matlab 仿真[J].应用科技,2006,33(06):80 - 82. LV Qiang, FENG Chi.A Variable Step Size LMS Algorithm and Its Matlab Simulation [J].Applied Science and Technology, 2006, 33(6):80-82. [7]肖海英,何方白.一种时域变步长BLMS自适应算法[J].西南科技大学学报,2006,21(02):30 - 35. XIAO HAI-ying, HE FANG-bai. A Variable Step Size BLMS Adaptive Algorithm in Time Domain [J].Journal of Southwest University of Science and Technology, 2006,21(02):30 - 35. [8]李竹,杨培林,行小帅.一种改进的变步长LMS算法及其在系统辨识中的应用[J].仪器仪表学报,2007,28(07):1340 - 1344. LI Zhu,YANG Pei-lin, HANG Xiao-shuai. Modified Variable Step Size LMS Algorithm and Its Application in System Identification [J].Chinese Journal of Scientific Instrument, 2007,28(07):1340-1344. 张炳婷(1990—),女,硕士研究生,主要研究方向为无线通信技术; 赵建平(1964—),男,教授,主要研究方向为无线通信技术; 马淑丽(1989—),女,硕士研究生,主要研究方向为无线传感器网络、无线通信技术。