六自由度并联柔性机构设计分析与优化
2016-01-19,
,
(辽宁石油化工大学机械工程学院,辽宁 抚顺 113001)
Optimization and Analysis of Design for 6-DOF Compliant Parallel Manipulator
GAO Jinhai,DENG Zilong
(School of Mechanical Engineering,Liaoning Shihua University,Fushun 113001,China)
六自由度并联柔性机构设计分析与优化
高金海,邓子龙
(辽宁石油化工大学机械工程学院,辽宁 抚顺 113001)
Optimization and Analysis of Design for 6-DOF Compliant Parallel Manipulator
GAO Jinhai,DENG Zilong
(School of Mechanical Engineering,Liaoning Shihua University,Fushun 113001,China)
摘要:从自由度和约束角度进行机构设计与分析的螺旋理论,是柔性机构设计的重要方法之一。基于螺旋理论设计了一种六自由度的全柔性微动平台,并利用有限元分析软件对其进行相应的位移、应力和模态分析。通过平台的有限元分析,获取影响平台的主要结构参数,并将其作为柔性铰链的优化设计参数,为新型多自由度柔性机构的设计提供借鉴。
关键词:六自由度;并联柔性机构;设计;性能分析;优化
中图分类号:TP242
文献标识码:A
文章编号:1001-2257(2015)03-0026-04
收稿日期:2014-11-12
Abstract:Screw theory of mechanism design and analysis is one of the important methods of compliant manipulator design from the viewpoint of freedom and constraint. A six degrees of freedom of flexible micro-platform that based on the screw theory has been designed, and finite element analysis software is used for the corresponding analysis of the drift strain and modal analysis on the platform. Through finite element analysis of the platform, the article has get the main structural parameters affecting the platform, as optimal design parameters of flexible hinge. The design will also contribute to the design of new type multi-degree of freedom flexible mechanism.
作者简介:高金海(1989-),男,山东潍坊人,硕士研究生,研究方向为机械现代设计与理论;邓子龙(1967-),男,辽宁葫芦岛人,教授,研究方向为机械现代设计理论与方法,机电液一体化。

Key words:six degrees of freedom;compliant parallel manipulator;design;performance analysis;optimization
0引言
随着微纳米科技的不断进步,柔性机构逐渐引起了微精密工程设计人员的广泛关注。柔性机构是指通过施加外力,使柔性铰链产生弹性变形,通过弹性变形传递力和运动,进而实现输出运动的目的。柔顺机构是由弹性元件构成,进行替代后可能导致机构整体刚度降低,故出现了全柔顺并联机构,即在整体弹性材料上经线切割加工出全柔顺支链,进而集成为全柔顺并联机构。由全柔顺支链构成的并联机构和传统机构相比有以下优点:全柔顺支链是经过线切割加工而成,可以减少装配,进而减少装配误差;机构与机构之间不存在加工误差和也不产生摩擦,因此,无需润滑,整体式机构可提高全柔顺并联机构的整体刚度,同时机构的空间结构也会减小。正因为全柔顺机构有如此多的优点,使得在精密微动定位领域有着较好的应用前景。
在此,以螺旋理论[1CD*23]为基础,设计了一种新型六自由度全柔性微动平台,并采用有限元分析软件对其进行相应的力学性能分析。依据优化理论,对柔性支链的主要参数进行相应的优化处理,为多自由度微动平台设计分析提供借鉴。
1六自由度并联机构运动特性
1.1 螺旋理论
将机构的转动副转换为螺旋矩阵表达式为:
(1)
将机构的移动副转换为螺旋矩阵表达式为:

(2)
a为运动副在各个轴线上的单位矢量;a0=r×a是直线的线矩,等于从原点到该轴线上任意一点的矢径r与a的叉乘积。
机构中所有螺旋矩阵构成螺旋系,在三维空间线性无关的螺旋数目为6,当所研究的螺旋系的线性无关的螺旋数n等于6时,不存在反螺旋;当螺旋系的线性无关螺旋数n小于6时,存在6~n个反螺旋,与所有运动螺旋相逆,使反螺旋与运动螺旋点乘积为零,即
(3)
ΓT=(a4a5a6a1a2a3),Γr=(ar1ar2ar3ar4ar5ar6)为反螺旋矩阵;ΓT·Γr=(a4ar1+a5ar2+a6ar3+a1ar4+a2ar5+a3ar6)。在坐标系中表示出机构的运动螺旋后,通过式(3)求出其反螺旋,而反螺旋的定义就是指机构的公共约束数。
1.2 六自由度并联机构运动分析
具有六自由度的全柔性并联机构如图1所示。
机构底层4个转动副与固定平台接触,并将该转动副作为第一运动副,中间移动副作为第二运动副,上层转动副与运动平台接触,将该转动副作为第三运动副。建立如图1所示坐标系,对第一驱动支链中各个运动副,根据螺旋理论可知,对第一支链第一运动副B1,即X轴向时,该转动副单位矢量a1x=(100),矢径r1x=(0k10),根据直线线距定义式,a0=r×a=(00-K1)由此可得该第一支链第一运动副在X轴向时的螺旋矩阵为:
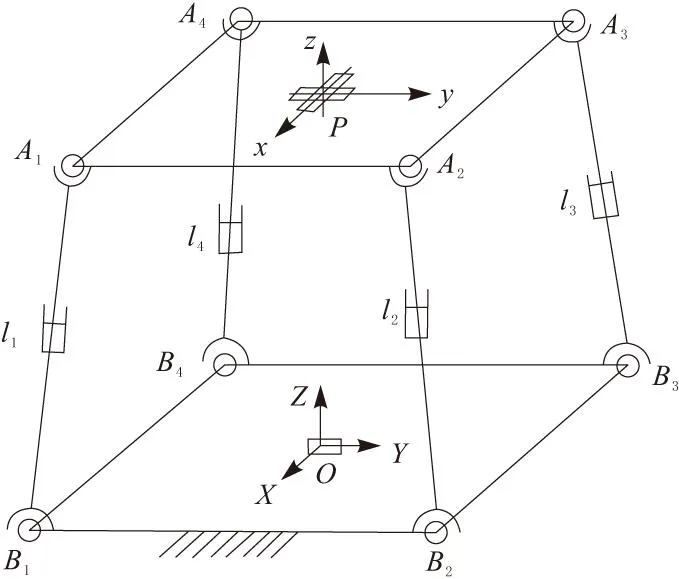
图1 六自由度并联机构
由此得出各个支链的螺旋矩阵为:
ri,ki为第1运动副相对OXYZ坐标轴的位置;ui、vi、wi为第2运动副轴线的方向余弦;li,mi,ni为第3运动副相对pxyz坐标轴的位置;i为驱动支链序号;1,2,3为第几层运动副。
由上式的7个运动螺旋,其中6个线性无关,根据螺旋理论可知,没有与该螺旋系相逆的反螺旋,即每个支链对上平台都无约束,即该机构为六自由度的运动机构。
2微动平台的设计与分析
2.1 微动平台的设计
柔性铰链的选取对柔顺并联机构的影响十分重要,主要表现在以下几个方面,即柔性铰链是否能实现大行程的平动或转动、柔性铰链的精度和柔性铰链结构的复杂性等[6-7]。
以上述六自由度并联机构运动分析为基础,设计相应的全柔性支链。在设计中,需要选取两种类型的柔性铰链。对于球铰,考虑用多轴或双轴柔性铰链代替。综合考虑柔性铰链选取几方面的因素,选取图2中双轴柔性铰链。对于平移铰链,通常考虑用平行导向机构来替代。
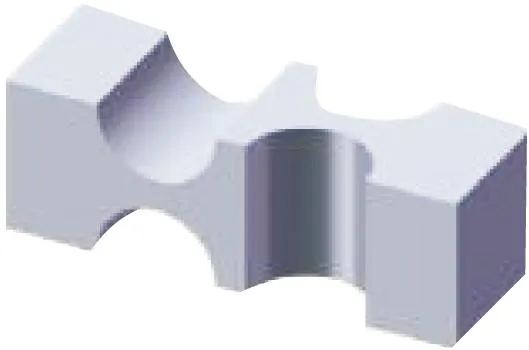
图2 新型双轴柔性铰链
应用SolidWorks软件建立支链及平台模型图模型,支链如图3所示。将支链的上下两平面分别与底座、动平台连接,所设计六自由度全柔性微动平台模型如图4所示。平台运动支链主要设计尺寸参数如表1所示。
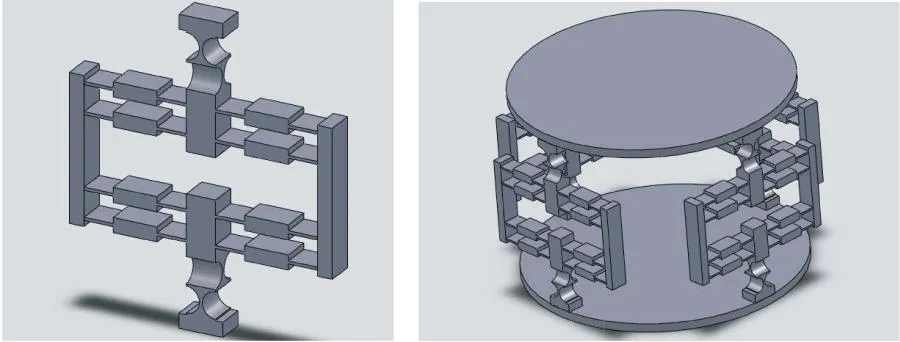
图3平台支链 图4六自由度全柔性平台

表1 表1平台支链主要设计尺寸 mm
2.2 基于有限元软件的六自由度全柔性平台的性能分析
2.2.1 无作用力下模态分析
将六自由度全柔性平台立体模型导入AnsysWorkbench中,选取材料为2A12工业硬铝,性能参数如表2所示。

表2 选取材料性能参数
在AnsysWorkbench中对立体模型采取智能网格划分,模态分析各阶振型如图5所示。固有频率数值如表3所示。

表3 无作用力下固有频率 Hz
从图5可知,所设计机构的自由度为6,与螺旋理论计算所得结果一致。从固有频率数据可知,该平台前两阶固有频率接近,后两阶阶固有频率接近,而且数值逐渐变大,表明该机构稳定性越好。
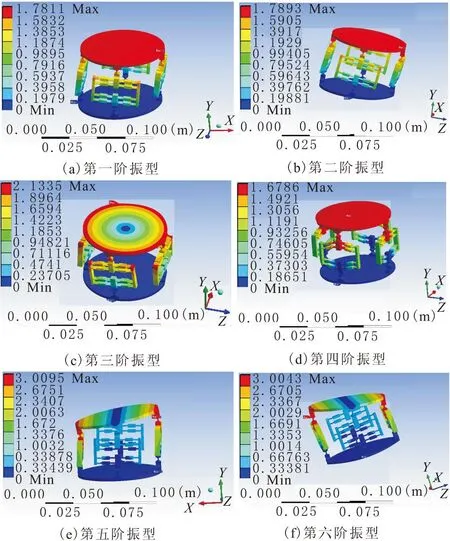
图5 模态分析振型
2.2.2 关键节点运动分析
在AnsysWorkbench分析软件中,按模型设计要求,在固定端施加全自由度约束。当给定第一支链输入Y方向作用力为10N时,分别分析平台顶点、各个支链顶点在Ux,Uy,Uz3个方向位移[9-10],以及平台最大应力。获得应力云图及位移云图如图6所示。所得位移及应力结果如表4所示。
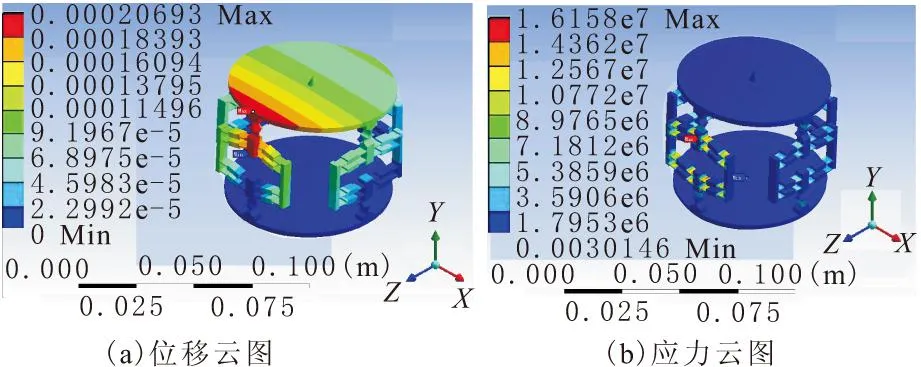
图6 位移及应力云图

表4 节点位移及最大应力
3平台支链优化处理
3.1 优化模型的建立
柔性微动平台的主要性能指标有工作行程、最大应力、质量和误差等。以此为基础建立优化模型,优化模型简化,确定目标函数、性能约束条件和边界约束以及优化参数。选取目标函数为:
(4)
Sout为定位平台的输出位移。
性能约束和边界约束条件为:
(5)
支链作为平台运动的主要构件,双轴柔性铰链和平行导向机构的尺寸对支链的影响最大,将表1中半圆型柔铰半径R、平行导向厚度L作为需优化的尺寸参数。
3.2 优化处理结果
该平台属于对称结构,对其中一个支链的1/4进行优化处理即可,其优化处理参数及变量如图7所示。
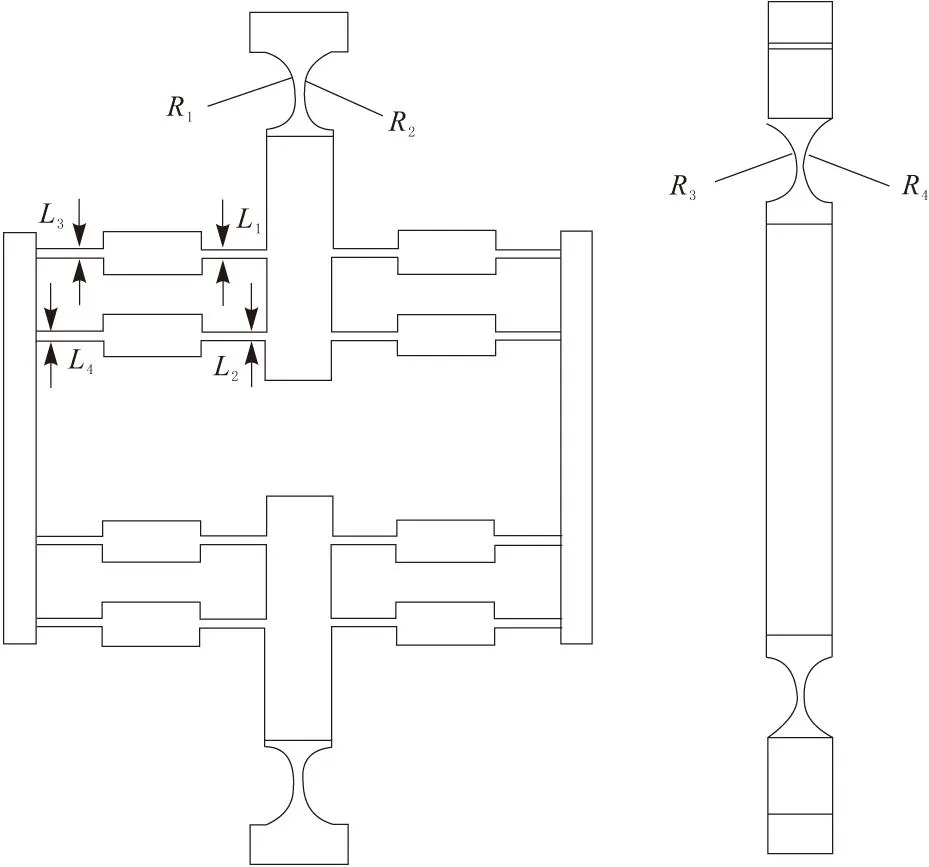
图7 运动支链参数选取
经优化获取优化前与优化后各个参数变化,以及应力等变化如表5所示。
由表5中可知,经优化处理后,该平台的整体质量变小,输出位移变大,最大应力仍在许用应力范围内,达到了预期优化效果。

表5 参数优化
4结束语
根据螺旋理论设计一种新型六自由度的全柔性并联微动平台,通过合理的选取柔性铰链来获得合适的柔性支链,并利用有限元软件对设计的微动平台进行分析,在分析基础上对平台支链的主要结构参数进行优化,获得了最优的支链模型。
参考文献:
[1]朱大昌,崔祥府,严智敏,等.3-RPC型并联精密定位机构设计与分析.有色金属科学与工程,2012(6):100-105.
[2]朱大昌,李培,崔祥府,等.四自由度全柔顺并联机构刚度分析.测试技术学报,2013,27(1):80-86.
[3]赵东标,查选芳,王珉,等.基于螺旋理论的机械手最优位姿轨迹规划方法研究.航空学报,1999,20(4):331-334.
[4]梁济民.基于柔顺机构的空间六自由度微位移精密定位平台研究.广州:华南理工大学,2012.
[5]卫江.新型4-SPS/PPU并联机构运动学分析.电气技术与自动化,2013,42(4):187-198.
[6]胡卫华.一种4自由度全柔性机构的设计与分析.现代商贸工业,2013(16):182-183.
[7]于靖军,毕树生,宗光华,等.三自由度3-CS并联平台机构的运动学分析.航空学报,2001,22(3):217-221.
[8]胡峻峰,徐贵阳,郝亚洲.一种新型空间微操作平台的设计和性能.机械设计与研究,2014(1):42-46.
[9]韩书葵,董旭.一种新型并联微动机器人运动学分析.北华航天工业学院学报,2013,23(1):1-4.
[10]李杨民,肖霄,汤晖.一种新型3自由度大行程微定位平台设计与分析.机械工程学报,2013,49(19):48-53.