MS-WEDM工作液智能控制系统装置研制
2016-01-18郭翠霞谢文玲杨大志张宏志
郭翠霞 ,刘 康 ,谢文玲 ,杨大志 ,张宏志
(1.四川理工学院,自贡 643000;2.人工智能四川省重点实验室,自贡 643000;3.过程装备与控制工程四川省高校重点实验室,自贡 643000)
多次切割技术在我国高速走丝电火花线切割机床已成功地运用,以低的成本改善了切割加工表面的精度和质量[1]。多次切割技术[2]对工件实施多次切割,即第一次高速切割成形;第二次精修,保证加工尺寸精度;第三次及以上抛磨修光,提高工件表面质量,俗称“中走丝电火花线切割机床”。但是,现MS-WEDM仍存在切割精度忽高忽低、保持性差等缺陷,其主要影响因素有电极丝换向、振动引起电极丝空间位置发生变化、工作液性能发生变化等,它们严重影响了加工放电效果[3-5]。结合高速走丝电火花线切割机床(具有多次切割功能)加工特点,在大量、相关研究的基础上,研制出一套适合我国MSWEDM工作液的智能控制系统,其加工稳定性得到提高,它的研制具有实际应用意义。
1 装置的结构与功能
工作液控制装置结构示意如图1所示,装置由1个自吸水泵、1个过滤器、1个球阀和6个电磁水阀(电磁水阀带单向功能)以及2个储液箱(分别是粗加工液箱和精加工液箱)组成。工作液通过进液电磁阀(9或10),流经过滤器13至自吸水泵1,从自吸水泵1流出的工作液有一部分经过泄压回路(球阀3、泄压电磁阀7和泄压电磁阀8)回流到对应的工作箱中,另一部分经过工作液电导率采集器和上、下丝臂供液管流到工作台液槽上参与电火花放电加工,工作液最终经过回液电磁阀(5或6)回到对应的工作液储液箱中。
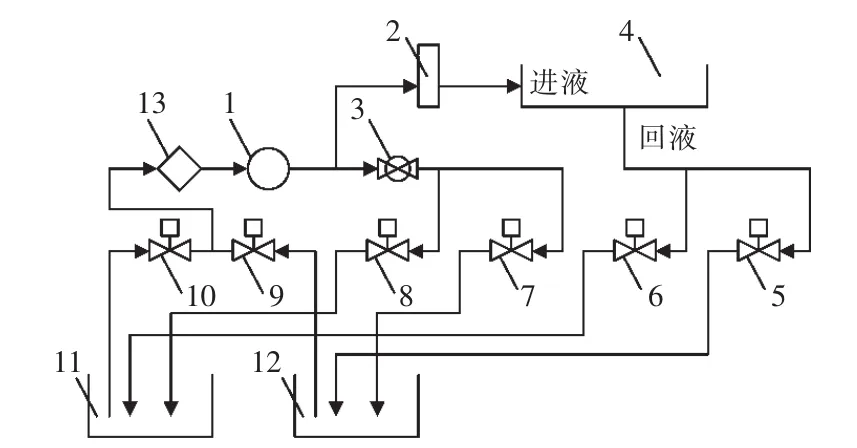
图1 控制装置结构示意Fig.1 Structure of control device
工作液智能控制系统在接通电源后,首先进行开机自检,即区分出具体的粗工作液箱和精工作液箱。其具体控制流程为
1)自吸水泵1启动,进液电磁阀10、泄压电磁阀8和回液电磁阀6开,工作液电导率采集器2开始采集储液箱12的电导率信号,经过A/D转换后,发送至单片机计算并保存。
2)自吸水泵1保持工作状态,在相继关闭进液电磁阀10、泄压电磁阀8和回液电磁阀6的同时,进液电磁阀9、泄压电磁阀7和回液电磁阀5也相应的开启,此时电导率采集装置2开始采集储液箱11的电导率,将此信号发送至单片机,并与之前储液箱12的电导率进行比较,从而区分出具体的粗、精工作液箱。
3)完成开机自检后,控制系统关闭自吸水泵1及所有的电磁阀,系统待机,等待接收机床加工信号。系统一旦检测到机床的加工信号,如机床开始粗加工,系统就会接收到粗加工信号,使粗加工工作液的供给、泄压和回液管路相应的电磁阀打开;如机床半精或精加工时,系统就会接收到相应的信号,并立即关闭粗加工工作液的相应供给、泄压和回液管路的电磁阀,打开精加工工作液供给、泄压和回液管路的电磁阀。控制系统能够满足在第一次切割时提供粗加工工作液,第二次及以上切割时提供精加工工作液的加工要求,同时提高了工作液的使用寿命。
4)控制系统能够实时监测工作液电导率值。一旦工作液电导率超过其设定值,系统在保证不影响机床正常加工的状态下,发出相应的报警信号,提醒操作人员更换粗工作液箱的工作液。
整个工作液智能控制系统设计采用模块化思想。硬件系统以单片机为控制核心,设计有电源模块、信号采集模块、控制模块和执行模块。软件系统程序包括各模块初始化程序、A/D模块TLC2543转换程序设计、温度传感器程序、串口屏显示程序、自动换挡检测程序、电磁阀程序、中断信号程序和串口上位机程序等。各软件系统模块分别用C51语言编写、编译和调试,运用主控程序Main()来调用各模块程序,从而完成对整个装置的控制。
2 硬件电路设计

图2 硬件设计方案Fig.2 Design scheme of hardware
工作液智能控制系统硬件电路框架如图2所示。系统由信号输入回路、单片机和执行元件三部分构成。输入回路包括工作液电导率信号采集电路,机床控制柜发出的工作液粗、精加工转换信号和工作液控制系统启动信号;控制芯片为STC89C58RD+;执行元件包括报警装置、继电器、电磁阀和水泵等。该装置器件的选择主要参考与单片机兼容、可控制的原则。
系统首先开机自检,自动判别具体的粗、精工作液箱。自检完毕,控制系统处于待机状态,等待机床加工信号。当机床发出加工信号时,控制系统立即启动水泵,并根据机床的加工状态,开启相应的电磁阀,同时对工作液电导率进行实时采集。工作液的电导率一旦超过设定值,则蜂鸣器报警,液晶显示相应的警示符号。此时,系统仍会保持工作液供给,不会影响正常加工。待机床完成加工后,工作液控制系统自动关闭水泵及相应电磁阀。
2.1 工作液电导率信号采集器
工作液导电性是靠离子的迁移来完成的。电导率的检测受到温度、电极常数和交流频率等因素的影响。为了能精确测量工作液电导率值,减小极化效应、电容效应、温度效应和“漏电压”干扰带来测量误差,系统采用测量线性度较好的分压法对工作液电导率测量。电导率传感器采用电极常数K=10的两极式铂黑电极,基材为玻璃,外壳为不锈钢,测量范围为10~20000 μs/cm,具有防水、抗污染能力强的优点。电极驱动电压为±5 V的方波,其频率为1000 Hz。工作液电导率采集器由驱动电压发生电路、电导率电极接线电路、变量程电路、信号放大调理电路、基准稳压电路、A/D转换电路、温度传感器电路和单片机等组成。
2.2 控制芯片和电源
控制芯片选用宏晶科技直插型的工业级STC89C52RC。该芯片价格低廉、性价比较高;工作电压为 3.3~5.5 V,工作频率为 0~40 MHz,片上已集成512 B的RAM;工作温度为-40~85℃。
控制系统板采用11.0592 MHz晶振。单片机引脚P0.0~P0.5端口用于控制电导率信号采集器的自动量程电路;P3.0和P3.1端口与串口液晶屏相连,用于显示;P3.1和P3.2端口接机床来的信号线,用于接收机床加工状态的信号;P2端口控制自吸水泵和电磁阀等。
控制系统的电源采用明威生产的开关电源,型号为Q60-C,220 V/50 Hz交流电,4组输出分别为+15 V,-15 V,+5 V和-5 V,1个COM接口, 功率为60 W,能满足系统要求。
2.3 机床信号转换电路
机床信号转换电路,由7个线性光电耦合器PC817,3个2 kΩ电阻以及2个1 kΩ电阻构成,如图3所示。来自机床的加工信号一般有3组,分别为第一次加工信号net1,第二次加工信号net2,第三次及以上加工信号net3。
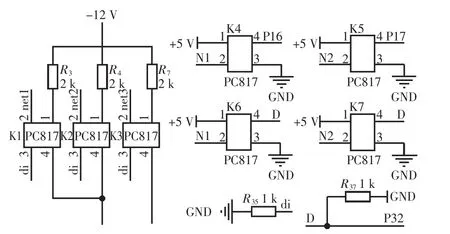
图3 机床加工信号转换电路Fig.3 Conversion circuit of machine tool processing signal
当机床处于不加工时,net1、net2和net3端口均处于高电平,所有光电耦合均处于截止状态。初始加工状态时,net1端口置低电平,net2和net3端口置高电平,此时光电耦合K3导通,B端口输出低电平信号,K4和K6导通,单片机P3.2端口得到一个下降沿信号,外部中断INT0开启,同时P1.7端口电平被置低,单片机监测到此时加工状态为第一次加工。依次类推,通过置net1,net2和net3端口不同的电平,单片机能检测出第二次加工,第三次或以上的加工状态。
2.4 蜂鸣器电路
为了避免干扰,蜂鸣器电路采用光电隔离,如图4所示。蜂鸣器为有源蜂鸣器,其控制口与单片机P2.6口相连,控制口为低电平时,蜂鸣器工作。
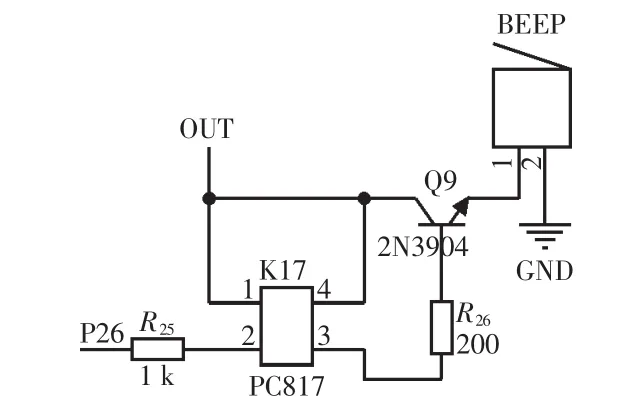
图4 蜂鸣器电路Fig.4 Buzzer circuit
2.5 执行器控制电路
自吸水泵控制电路如图5所示,单片机P2.0端口的控制信号控制线性光电耦合器PC817的开闭,通过三极管Q1的导通与截止来控制继电器K7的开闭。继电器最大耐压250 V,最大耐电流10 A。为了减少控制电路对单片机的干扰,在单片机与继电器之间进行隔离。
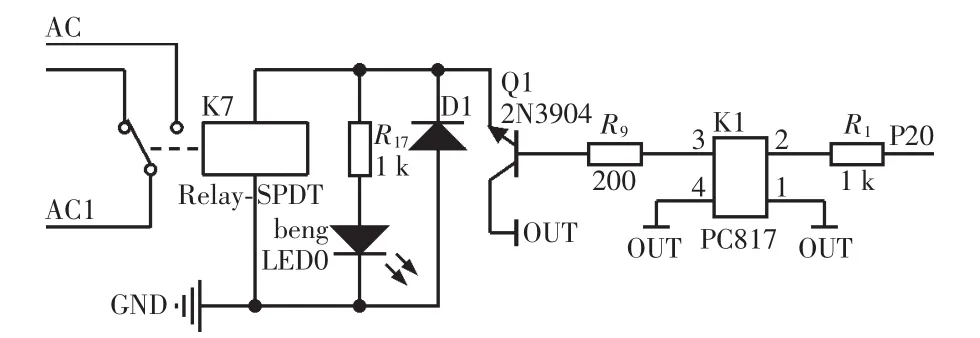
图5 自吸水泵控制电路Fig.5 Self-priming pump control circuit
各电磁阀控制电路如图6、7、8所示,S1和S2分别接工作液管路的进液电磁阀,S3和S4分别接工作液管路的泄压电磁阀,S5和S6分别接工作液管路的回液电磁阀。单片机通过对各继电器的控制即可实现工作液的智能控制。

图6 进液电磁阀控制电路Fig.6 Control circuit of liquid inlet solenoid valve
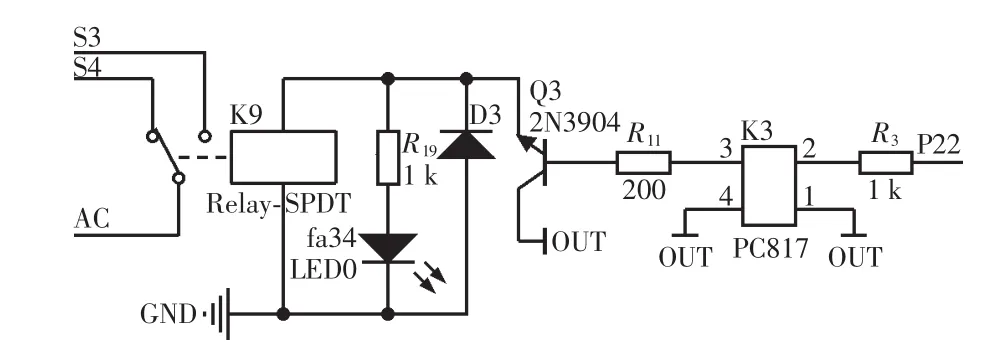
图7 泄压电磁阀控制电路Fig.7 Control circuit of pressure relief solenoid valve
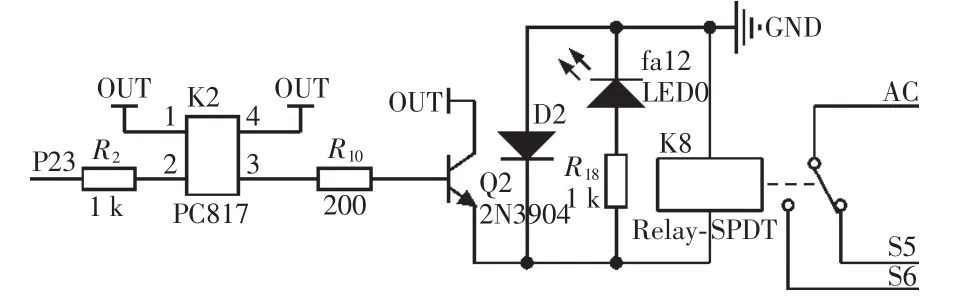
图8 回液电磁阀控制电路Fig.8 Control circuit of liquid return solenoid valve
电磁阀控制电路的继电器为单刀双掷继电器。其线圈通断电分别通过单片机P2.1,P2.2,P2.3控制三极管Q1,Q2,Q3的导通与截止来实现的,低电平时导通。在继电器线圈上反向并联续流二极管1N4007,用于抑制和吸收线圈断电时反向电动势的作用。在三极管与单片机I/O口之间,用光电耦合器PC817隔离,避免三极管2N3904漏电流对单片机的影响。
2.6 样机制作
工作液智能控制系统的样机已制作完成,如图9所示。PCB板制成2块:信号板和控制板。信号板与控制板通过JTAG线连接,采用光电隔离,将单片机I/O口与三极管基极隔离,使信号板与控制板仅保持信号联系,而不直接发生电的联系,避免三极管漏电流对单片机的干扰。

图9 控制系统样机Fig.9 Prototype
3 结语
MS-WEDM工作液智能控制装置能够在线检测粗、精工作液槽的工作液电导率,并判断其能否满足粗、精加工要求;根据多次切割加工技术的特点,合理地控制粗、精加工工作液的交换,有效地提高加工精度和表面质量等工艺性指标,并提高加工稳定性。该装置结构简单,使用常用的元器件,成本低;可直接安装在现有的中走丝电火花线切割机床上,通用性好。
[1]刘志东.高速往复走丝电火花线切割的现状及发展[J].机械制造与自动化,2013,42(2):1-6.
[2]刘晋春,白基成,郭永丰.特种加工[M].5版.北京:机械工业出版社,2008.
[3]李明辉.杨振步.蒋文英.中走丝电火花线切割机的特点与发展趋势[J].航空制造技术,2011,54(8):32-35.
[4]郭翠霞,刘康,谢文玲,等.工作液电导率对MSWEDM加工工艺性指标影响研究[J].机床与液压,2014,42(6):77-79.
[5]魏为.提高高速往复走丝电火花线切割加工精度及稳定性试验研究[D].南京:南京航空航天大学,2011.
