基于跟随滤波和相敏检波的转轴动平衡检测系统
2016-01-12刘振,张仁杰,陈雷亮等
基于跟随滤波和相敏检波的转轴动平衡检测系统
刘振,张仁杰,陈雷亮,刘虎
(上海理工大学 光电信息与计算机工程学院,上海200093)
摘要针对传统平衡装置需要将回转体拆出检测的不便性,尝试根据跟踪滤波和相敏检测技术研究出可用于典型旋转体设备的现场动平衡测试装置,此装置主要包括信号处理模块、下位机、上位机模块。通过现场模拟实验,证明该装置在600~1 800 r·min-1范围内,能直接对整机和机组进行动平衡检测,数据的误差均在允许的范围内,其不平衡量最大误差为0.347 g,相位最大误差不超过5°,并具有良好的测量精度和重复性。
关键词现场动平衡;振动加速度;互相关原理;转子;跟踪滤波器
收稿日期:2015-02-02
作者简介:刘振(1990—),男,硕士研究生。研究方向:电力电子。E-mail:1056859198@qq.com
doi:10.16180/j.cnki.issn1007-7820.2015.09.029
中图分类号TP274+.5
Design of the Dynamic Balance Detection System of Rotating Shaft Based on theFollowing Filtering and the Phase Sensitive Detection Technology
LIU Zhen,ZHANG Renjie,CHEN Leiliang,LIU Hu
(School of Photoelectric Information and Computer Engineering,University of Shanghai for
Science and Technology,Shanghai 200093,China)
AbstractThis paper studies the test experimental device of the field balance of typical rotating equipment,introduces the use of filtering and phase sensitive detection technique.Compared with the traditional dynamic balancing device,this device can take dynamic balance detection on the machine and unit motivated directly without disassembling rotary body.To make a correct and comprehensive assessment of the performance of the machine quickly,we improve the production efficiency through the field simulation experiment,which proves that the device has high accuracy and good repeatability in the range of 600~1 800 r·min-1 and can be a good field balance testing experimental device.
Keywordsfield dynamic balance;vibration acceleration;principle of the cross correlation;rotor;tracking filter
在工业生产中,旋转体设备广泛用于船舶汽车、电力、冶金、机械制造等领域。在实际的运行过程中,旋转体设备中的转子多数是不平衡的,使得机器的零部件承受附加的动载荷力,产生了振动,影响了设备性能[1]。为此,必须对转子进行动平衡检测,目前,对于常见典型旋转设备的动平衡检测一般需要将设备的回转体拆下后,固定在工艺轴或专门支承上进行测量和处理,耽误时间,降低了生产效率。因此,一个便携、功能灵活的测试系统是设备工程师的首选。
1转子动平衡原理
如图1所示为刚性转子简图,刚性转子理解为由若干个圆盘所组成的,设在其中一个圆盘作用在O点的惯性力为F,可将力F分解为作用于a、b两点同向平行力Fa和Fb,a、b两点的位置任意指定,则各力之间的关系可表示如式(1)所示。

图1 转子简图
(1)
若将转子分解成n个薄心圆盘,各圆盘产生的惯性力都分解为两个平行力,分别通过图1所示的A、B两个平面。若将图中第i个圆盘产生的惯性力Fi分解成FiA和FiB,则有
(2)
式(2)中,l为转子两个端面A、B之间的距离;li为第i个惯性力至图中A端面的距离。
根据由转子不平衡量引起的振动幅度与转子转速是同频信号,提出了一种基于互相关原理的超窄带跟踪滤波电路的设计。假定加速度传感器获得的振动加速度信号如式(3),光电传感器获得的转速信号如式(4)所示。
x(t)=s(t)+υ(t)
(3)
y(t)=A0ejω0t
(4)
令式(3)中的s(t)=Asin(ω0t+φ),其中A为振动加速度信号的幅值、ω0为转子转速的角频率、φ为与转速信号之间的相位差。式(3)可改写为
x(t)=Asin(ω0t+φ)+∑A′sin(wt+φ′)+A″
(5)
式(5)中∑A′sin(wt+φ′)为非同频干扰噪声v(t)的求和形式,A″为振动加速度采集到的信号中可能含有的直流分量,参考信号y(t)可写成y1(t)=A0sinω0t和y2(t)=A0cosω0t,相位相差90°。将y1(t)和y2(t)分别与式(5)做互相关处理,为了分析方便,将y1(t)和y2(t)分别与x(t)相乘,可得
z1(t)=x(t)y1(t)=1/2A0[Acosφ-Acos(2ω0t+φ)]+1/2{∑Acos[(ω-ω0)t+φ′]-∑Acos[(ω+ω0)t+φ′]}+A″A0sinω0t
(6)
z2(t)=x(t)y2(t)=1/2A0[Asin(2ω0t+φ)+Asinφ]+1/2A0{∑A′sin[(ω+ω0)t+φ′]+∑Asin[(ω-ω0)t+φ′]}+A″A0cosω0t
(6)
由式(6)和式(7)可知,等式右边分别含有直流分流1/2A0cosφ和1/2A0sinφ,其中包含振幅A和相位φ信息。根据相关性原理可知,将z1(t)和z2(t)分别积分,即可得出直流分流A1和A2。结果如式(8)和式(9)所示
(8)
φ=arctanA2/A1
(9)
2硬件电路
2.1 互相关电路设计
在微弱信号检测中,采用互相关法是一种有效的方法,本文采用相敏检测器技术来实现加速度信号和转速信号的互相关性[3-4];相敏检测器就是把两路信号相乘,再经过低通滤波器滤除交流信号,提取出直流分量[5-6]。
在Ⅲ度及以上乏力方面,有 3 篇研究[5,6,8]进行了报道,样本量共223例:替吉奥组113例,卡培他滨组110例。各研究间具有同质性(P=0.32,I2=11%),采用固定效应模型。结果显示,替吉奥组与卡培他滨组在乏力方面无明显差异,无统计学意义[RR=0.63,95%CI:(0.26,1.54),P=0.31]。
图2为数模乘法器的具体硬件实现电路原理图,采用8位乘法数模转换芯片TLC7524和仪用放大器TL082组成。
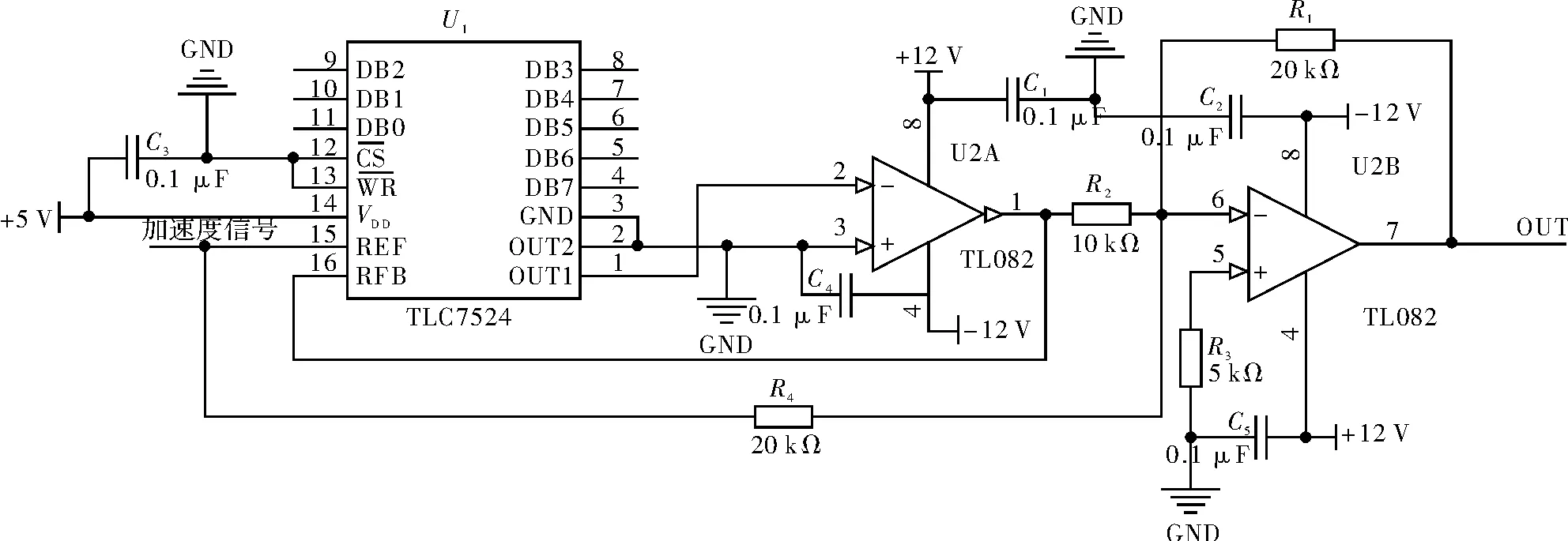
图2 数模乘法器硬件电路图
2.2 跟踪滤波电路设计
采用锁相环集成电路芯片CD4046和同步加法计数器器CD4518构成100倍频电路,为MAX291提供时钟信号,如图3所示,将CD4046的输出信号作为CD4518十进制计数器的时钟信号,就可在CD4046的输出端得到转速信号100倍频的信号[7-9]。
3软件设计
程序设计主要包括:两个外部中断模块分别用于采集ADC的数据和转速脉冲信号计数;串口中断模块用于和上位机建立通信;定时中断模块用于内部集成ADC的数据采集[10],控制增益放大器的倍数,调节增益的大小;控制模块对测试系统的测量模式进行切换,如图4所示。
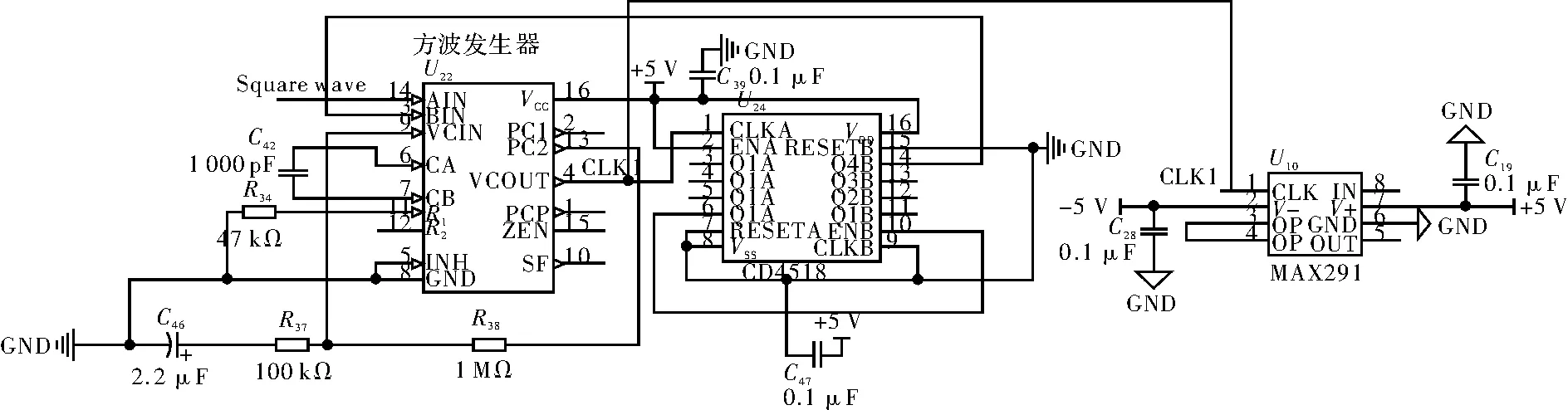
图3 跟踪滤波电路
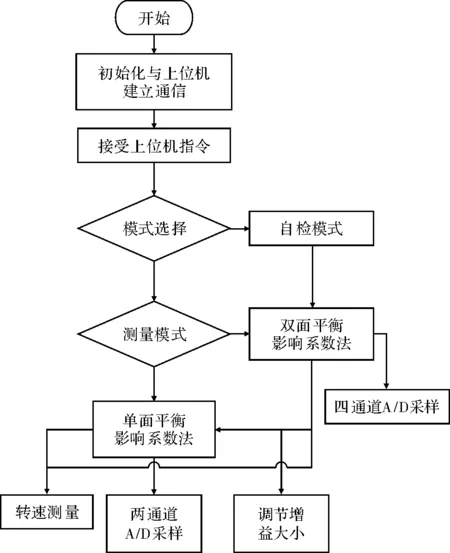
图4 程序系统框图
4实验结果
在现实环境下,在固定的平衡机上进行电路测试,其中图5是原始信号和跟踪滤波后的信号,图6是相敏检波相乘后的信号和光电信号,可以看出不平衡量的频率是光电信号的2倍。

图5 原始信号(上)和跟踪滤波信号(下)

图6 相敏检波相乘后的信号(下)和光电信号(上)
再提取出上图中的直流分量,通过前面的公式即可计算出不平衡量和相位值。对转子在不同转速下,在相同的相位上加上不同的试重块对系统进行验证,标准校验转子1平面的120°处,在15种情况下进行了测量,其测量结果如表1所示。

表1 实验数据

5结束语
本文分析了国内外现场动平衡的研究现状以及动平衡技术的总体发展趋势,通过对转子动平衡的理论分析,设计一套现场动平衡测试装置。该装置的设计基本思想是基于转子在动平衡实验时转子不平衡量的振动加速度信号和转子的转速是同频信号,根据互相关原理来实现对典型旋转体的转子不平衡量提取,设计了测量系统的硬件电路以及软件。最后将该测试装置在YYQ-50型平衡机上模拟现场动平衡实验,实验结果证明,该测试装置有较高的精度和较好的重复性,能作为一台现场动平衡测试实验装置进一步开发。
参考文献
[2]高晋占.微弱信号检测[M].北京:清华大学出版社,2011.
[3]张学龙,陈德智.一种相敏检测电路[J].广西师范大学学报:自然科学版,1997,15(4):53-57.
[4]盖建新.基于数字相关算法的动平衡测试系统的研究[D].哈尔滨:哈尔滨理工大学,2006.
[5]李文清.基于DSP的便携式现场动平衡测试仪的开发与研究[D].重庆:重庆大学,2005.
[6]张晓军.微速差双转子系统动力特性研究[D].杭州:浙江大学,2007.
[7]曹雏清,陈国聪.刚性转子现场动平衡仪的设计与开发[J].机械制造,2007,45(10):69-72.
[8]洪沁.一种电机转子动平衡测试系统的设计[J].机电工程,2006,23(l):40-43.
[9]丁天怀,李庆祥.测量控制与仪器仪表现代系统集成技术[M].北京:清华大学出版社,2005.
[10]寇剑菊,刘旻.一种基于AD7865的数据采集系统的设计[J].国外电子元器件,2007(9):37-39.

