一种增量式半监督VPMCD齿轮故障在线诊断方法
2016-01-12杨宇,潘海洋,李永国等
第一作者杨宇女,博士,教授,1971年4月生
一种增量式半监督VPMCD齿轮故障在线诊断方法
杨宇,潘海洋,李永国,程军圣
(湖南大学汽车车身先进设计制造国家重点实验室,长沙410082)
摘要:针对齿轮故障诊断中难以获得大量故障样本的问题及实时在线诊断的需求,提出了一种基于增量式半监督多变量预测模型(Incremental Semi-supervised Variable Predictive Model based Class Discriminate,ISVPMCD)的齿轮故障在线检测方法。 首先使用VPMCD方法给少量的已知样本建立初始预测模型,接着利用VPMCD方法中的判据给未标识样本赋予初始伪标识,然后通过互相关准则筛选出伪标识样本,最后利用伪标识样本和已知样本作为训练样本更新初始预测模型,使得更新的预测模型能兼顾整个样本集的信息,从而可以有效地解决小样本的故障诊断问题,另外,由于该方法在实时更新新样本的过程中不需要再次建立判别模型,从而缩短了分类时间,为实时在线诊断提供了新的思路。对UCI标准数据以及齿轮实测数据的分析结果表明,适合于小样本的ISVPMCD模式识别方法可以更快更准确地识别齿轮工作状态和故障类型。
关键词:ISVPMCD;增量式;半监督;齿轮故障诊断
基金项目:国家自然科学基金(51175158,51075131);湖南省自然科学基金(11JJ2026);中央高校基本科研业务费专项基金资助项目
收稿日期:2013-09-09修改稿收到日期:2013-11-15
中图分类号:TH113文献标志码:A
A novel incremental semi-supervised VPMCD gear fault on-line diagnosis method
YANGYu,PANHai-yang,LIYong-guo,CHENGJun-sheng(State key Laboratory of Advanced Design and Manufacture for Vehicle Body,Hunan University, Changsha 410082, China)
Abstract:Aiming at the problem that getting a large amount of fault samples is difficult and the demand of real-time online diagnosis for gear fault diagnosis, a novel incremental semi-supervised variable predictive mode-based class discriminate (ISVPMCD) gear fault on-line detection method was put forward here. Firstly, the VPMCD approach was used to establish an initial prediction model for a small number of labeled samples. Secondly, the criterion of VPMCD was used to provide initial pseudo labels for unlabeled samples. Thirdly, the pseudo labeled samples were screened with the cross-correlation rule. Finally, the pseudo labeled samples and labeled samples were taken as the training samples to update the initial prediction model, so that the global information of the whole sample set could be considered, and the problem of fault diagnosis of a small set of samples could be solved effectively. In addition, the method did not need to establish a discriminant model in the process of real-time updating new samples, it shortened the time of classification and offered a new way for real-time online diagnosis. The analysis results of the UCI standard data and the test data of gears showed that the ISVPMCD pattern recognition method being suitable for small samples can be used to identify the gear working state and fault type much more quickly and accurately.
Key words:incremental semi-supervised variable predictive mode-based class discriminate (ISVPMCD); incremental; semi-supervised; gear fault diagnosis
对于齿轮故障诊断,首先需要获取各种状态的已知样本,然后通过学习已知样本构建分类器,最后通过分类器进行模式识别。但是在实际情况中,由于条件的限制,很难获得大量的已知样本,尤其是故障样本,因此如何通过分类器利用少量的已知样本更快更准确地识别齿轮故障状态,一直是相关学者关注的热点问题[1-2]。
模式识别方法本质上就是一种机器学习分类器,它通常可以分为监督和无监督学习两种。对于传统模式识别方法,大多是非监督学习算法,如K-临近的距离判别、决策树聚类分析和模糊算法聚类分析等等[3-5],其特点是算法成熟和操作简单,而且少量已知样本下就可以分类识别,但其学习分类效果往往很难达到要求;对于监督学习算法,如神经网络和支持向量机,他们相对于非监督的学习算法,其分类效果往往可以保证,但他们都存在一些难以克服的缺陷[6,7],如参数或者核函数的选择,其识别结果受主观影响较大。除此之外,上述模式识别方法都忽视了用于故障诊断的特征值之间的内在关系。然而,在机械故障诊断中,所有或部分特征值之间大都具有一定的内在关系,而且这种内在关系在不同的系统或类别(相同的系统在不同的工作状态下)间具有明显的不同。
基于特征值之间的这种关系,以及结合监督学习与非监督学习的优点,本文提出了一种基于增量式半监督的多变量预测模型模式识别(Incremental Semi-supervised Variable Predictive Model based Class Discriminate,ISVPMCD)方法。首先原VPMCD的实质就是通过特征值之间的相互内在关系建立数学模型,对于不同的类别可以得到不同的数学模型,从而可以采用这些数学模型对被测试样本的特征值进行预测,把预测结果作为分类的依据,进一步进行模式识别[8]。但是原VPMCD方法也是一种监督性的模式识别方法,其对于模型的建立,是建立在具有大量已知样本的情况下,由于实际情况中,获取有标记的已知样本通常需要付出较大的代价,以及拾取的信号极其复杂,从而提取的特征之间也存在较为复杂的关系,少量样本建立的模型不能涵盖特征值之间的这种复杂关系。另外,随着提取特征值数目的增加,原VPMCD需要不断地迭代循环,导致建模时间过长,不利于在线诊断的进行。因此,鉴于原VPMCD方法应用的局限性,提出了一种ISVPMCD模式识别方法,该方法恰好可以有效地解决已知样本过少以及在线诊断的问题。
该方法的原理是首先通过已知的少量标记样本建立VPMCD初始预测模型,选为固定的模型,以后诊断不再变动,接着把大量的未知样本,即未标记样本,输入到已建立的VPMCD预测模型,从而初步识别各个未知样本的类别,由于VPMCD方法是以最小预测误差平方和为判别依据,因此,从分出的各个类别中分别选出预测误差平方和最小的z个,即为初始伪标识样本,然后按照互相关准则从初始伪标识样本中筛选出一部分伪标识样本,最后把伪标识样本放入到已标记样本中去,共同作为学习样本来更新初始预测模型,把所有的未知样本进行再次分类,从而实现半监督的效果,半监督就是将已标识样本和未标识样本提供的聚类信息结合起来,进而提高算法的分类精度。
综上所述,基于增量式半监督的VPMCD在线诊断方法,就是通过选取伪标识样本引入未知样本进入VPMCD学习,从而来更新预测模型,使得该算法在小样本情况下能充分考虑未知样本带来的结构信息,进而提高算法的分类精度。另外,由于在样本更新过程中不需要再次建立新模型,只需要更新已建立的预测模型,从而大大降低了分类时间,使在线诊断成为了可能。
1增量式半监督VPMCD算法
1.1 原始VPMCD算法
针对机械故障诊断,往往通过提取信号的特征来进行识别。由于特征值之间存在的内在关系,这种关系可能是一对一或者一对多,因此,当一个故障类别用p个不同的特征值来描述时,即X=[X1,X2…,Xp],其关系可能是X1=f(X2)或者X1=f(X2,X3,…)。而在不同的故障类别中,X1会受到其它特征值的影响而产生不同的变化。为了识别系统的故障模式,需对每个故障状态的各种特征值建立数学模型,而这些变量预测模型VPMi都是线性或者非线性的回归模型,文献[8]中提出了已有的四种数学模型。以p个特征值为例,对四种模型中任意一个模型采用特征值Xj(j≠i)对Xi进行预测,都可以得到:
Xi=f(Xj,b0,bj,bjj,bjk)+e
(1)
式(1)称为特征值Xi的变量预测模型VPMi。其中,特征值Xi称为被预测变量;Xj(j≠i)称为预测变量;e为预测误差;b0、bj、bjj和bjk为模型参数。
1.2 基于ISVPMCD检测算法原理步骤
原VPMCD是一个监督性的分类算法,对于标记样本较少时,由于缺少状态信息,建立的模型不能充分表达该状态下的真实模型,为了能将未标识样本的聚类信息纳入到训练过程,进而提高算法的分类精度,以及解决特征值较多时的在线诊断问题。本文提出一种基于三阶段的增量式半监督VPMCD在线检测算法,该算法首先利用原VPMCD方法给部分未标识样本以初始伪标识,然后对伪标识样本进行再次选择,选出更加有效的伪标识样本,接着将这些伪标识样本和标识样本共同输入到VPMCD算法中更新预测模型,使得ISVPMCD算法在更新的预测模型中能得到更全面的样本集合信息,建立更加全面的模型,进而提升算法的分类性能及分类速度。
1.2.1基于第一阶段学习-初始伪标记样本的识别
对于第一阶段的学习,主要目的是设定初始预测模型和初步选择一定量的伪标记样本,建立初始预测模型属于诊断前的准备阶段。第一阶段学习的主要思想是:首先采用少量的已知样本通过VPMCD训练,建立初始预测模型,为诊断做准备,然后对大量的未标记样本进行分类。由于VPMCD的原理是以误差平方和最小为判据进行分类,因此,从识别出来的样本中,选取每种状态预测误差平方和值最小的z个作为初始伪标识样本,记作z1×p,z2×p,…,zg×p,g为状态类别数目,p为每个样本提取的特征值数目。
1.2. 2基于第二阶段学习-伪标记样本的筛选
通过第一阶段的学习,选出部分初步认定的初始伪标记样本,然而经过一次的训练学习,很难找出合适的伪标记样本,有用的伪标记样本有利于对故障的诊断,无用的伪标记样本会影响预测模型的建立,从而干扰故障的诊断,因此,本文采用第二阶段的筛选,选出更加有效的伪标记样本。其方法是首先经过第一阶段的学习,每种状态选出一定数量的伪标记样本,其伪标记样本矩阵为z1×p,z2×p,…,zg×p,接着对选出的每个伪标记样本与该状态的已知样本(n1×p,n2×p,…,ng×p,n为已知样本数)进行互相关,每种状态可以得到n×z个相关系数,然后对每个伪标识样本得到的相关系数求取平均值,最后设定一个阈值r,本文中阈值r为全部样本相关系数的平均值,对于具体的实际阈值无法确定,只是选择一部分最有可能的伪标识样本,不需要严格的阈值选择。经过筛选,每种状态选出的伪标识样本为zz1×p,zz2×p,…,zzg×p。
1.2.3基于第三阶段学习-未标记样本的识别
筛选出伪标识样本过后,接着把伪标识样本和已知样本混合在一起共同作为训练样本,再次进行VPMCD训练,建立预测模型,此次建立的模型是对初始预测模型的更新,不需要再次迭代循环,节省了训练时间,有效地保障了在线诊断。另外,该算法不但保持了已知样本建模的信息,而且通过伪标识样本使得模型得到了进化,进化的模型更加真实,更加能说明各种状态特征值之间的关系,从而有利于故障诊断。
2基于ISVPMCD齿轮故障检测算法步骤
在进行齿轮故障诊断时,齿轮振动加速度信号一般是非线性、非平稳信号,因此从这些非平稳信号中提取有效信息将是齿轮故障诊断的关键所在[9]。传统的诊断方法都是对振动信号进行单一的时域或频域分析,进而识别齿轮的工作状态,由于摩擦、负载、刚度和间隙等非线性因素的存在,仅从单一的时域或频域方面对齿轮工作状态进行分析,很难精确识别出齿轮的故障。因此,在提取信号的特征之前,必须先对信号进行处理。时频分析是常用的处理非平稳问题的方法,它能够同时在时域和频域提供非平稳信号的局部化信息。目前广泛使用的时频分析方法,如EMD、LMD和ITD方法。但是这些方法都在不同程度上存在缺陷[10-11],影响了诊断结果。因此,提出了一种改进的ITD算法——局部特征尺度分解(Local characteristic scale decomposition,LCD)算法[12],该算法的有效性及其在端点效应和分解时间方面均证明优于EMD和LMD方法。
对振动信号进行时频分析处理过后,接着就要提取信号特征值,特征值的好坏也直接影响到诊断的结果,奇异值(Singular Value Decomposition,SVD)常被用来作为故障特征进行齿轮故障诊断,且取得了较好的效果,因此,选取奇异值作为故障特征。本文将上述LCD分解方法和ISVPMCD算法应用到齿轮故障检测中,具体步骤如下:
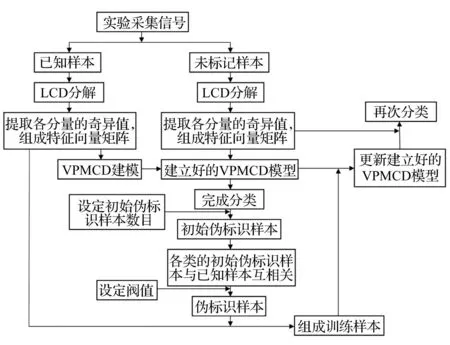
图1 齿轮故障诊断流程图 Fig.1 The flow chart of gear fault diagnosis
(1)在一定转速下以采样率fs对齿轮正常和断齿故障两种状态进行采样,每种状态采集N组样本。
(2)利用LCD方法首先对原始振动信号进行分解,分解得到若干个ISC单分量;然后对前i个ISC分量(i=1,2,…,n,i为特征值的个数)进行奇异值分解,并把奇异值作为特征值,组成特征值向量,将已知样本和未标识样本组合成样本集合。

(4)从识别出来的样本中,选取每种状态预测误差平方和值最小的z个作为初始伪标识样本。
(5)对选出的初始伪标识样本与该类的已知样本进行互相关,求出相关系数,取平均值;然后设定一阈值r,相关系数大于阈值r,予以保留,其他的予以剔除,从而筛选出伪标识样本。
3应用
3.1 UCI标准数据应用
UCI标准数据[13]是比较公认的验证数据,因此,为了验证ISVPMCD方法的适用性及优越性,本文采用UCI标准数据进行测试,选取UCI标准数据中iris数据、liver数据和pima数据三类数据进行试验。其中,iris数据包含4个特征值,三种状态;liver数据包含6个特征值,两种状态;pima数据包含8个特征值,两种状态。首先分别任意选取iris数据、liver数据和 pima数据中的10组作为训练样本,任意选取40组作为测试样本;然后使用ISVPMCD分类器对训练样本进行训练建立模型;最后通过所建立的模型对测试样本进行分类,与此同时,使用RBF神经网络、支持向量机和VPMCD分类器与其进行对比。其四种分类方法如下:
(1)首先经过优化选择,设置RBF神经网络训练误差的平方和为0.000 01,然后直接运用RBF神经网络进行模式识别。
(2)首先经过优化选择,设置支持向量机的折衷系数为10,核函数为RBF核函数,然后通过支持向量机进行模式识别。
(3)直接通过VPMCD的训练学习进行模式识别。
(4)首先通过VPMCD训练建立初始预测模型,为ISVPMCD在线诊断做准备,接着通过第一阶段的训练学习,设定初始伪标识样本为20组,然后经过第二阶段的筛选,得到最终的伪标识样本,最后把伪标识样本加入到已知样本中参与第三阶段的训练学习,对所有未知样本进行模式识别。即ISVPMCD在线诊断方法。
其分类结果如表1所示。
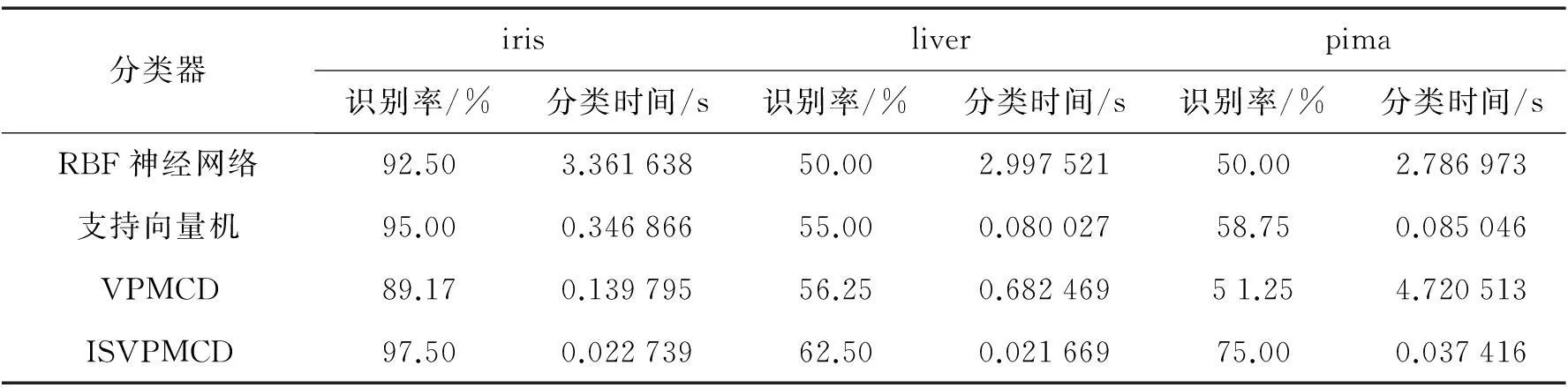
表1 三类UCI标准数据样本在四种分类器下的识别率及分类时间
从表1中可知,四种类分类器对iris数据在小样本条件下都有较高的识别率,在识别率方面,ISVPMCD分类器相对于其他三种分类器,高出2%~7% ,另外,ISVPMCD分类时间大大减少,只有0.022 739 s;对于liver数据和pima数据,四种分类器对liver数据和pima数据的分类识别率都不是特别高,这时ISVPMCD表现出了较强的优越性,对于liver数据,识别率高出了6%~12%,对于pima数据,识别率高出了16%~25%,而分类时间只有0.02 s-0.04 s。因此,ISVPMCD对于其他三种分类器,不但识别率有较大的提高,而且最重要的是分类时间大大降低,从而验证了ISVPMCD的适用性及优越性。
3.2 实例应用
为了验证ISVPMCD在小样本机械故障诊断中的有效性,将该方法应用于齿轮实验数据。实验数据包含两种状态,即正常和断齿状态。在试验装置中,主动齿轮齿数和从动齿轮齿数分别为75和55,断齿故障被设置在从动齿轮上。采集数据时,采样频率是8 192 Hz,被测齿轮转速为1 200 r/min,样本点数为2 048,正常和断齿两种状态各采样200个样本。正常和断齿的振动信号时域波形分别如下图2和图3所示。在图2中,理论上的断齿齿轮振动信号应该具有周期性脉冲特征,而实际上并不明显,是由于背景噪声的干扰以及采集条件的限制,因此图3中断齿齿轮振动信号特征较正常信号并不明显。

图2 正常齿轮振动信号的时域波形 Fig.2 The time domain waveform of normal gear vibration signals
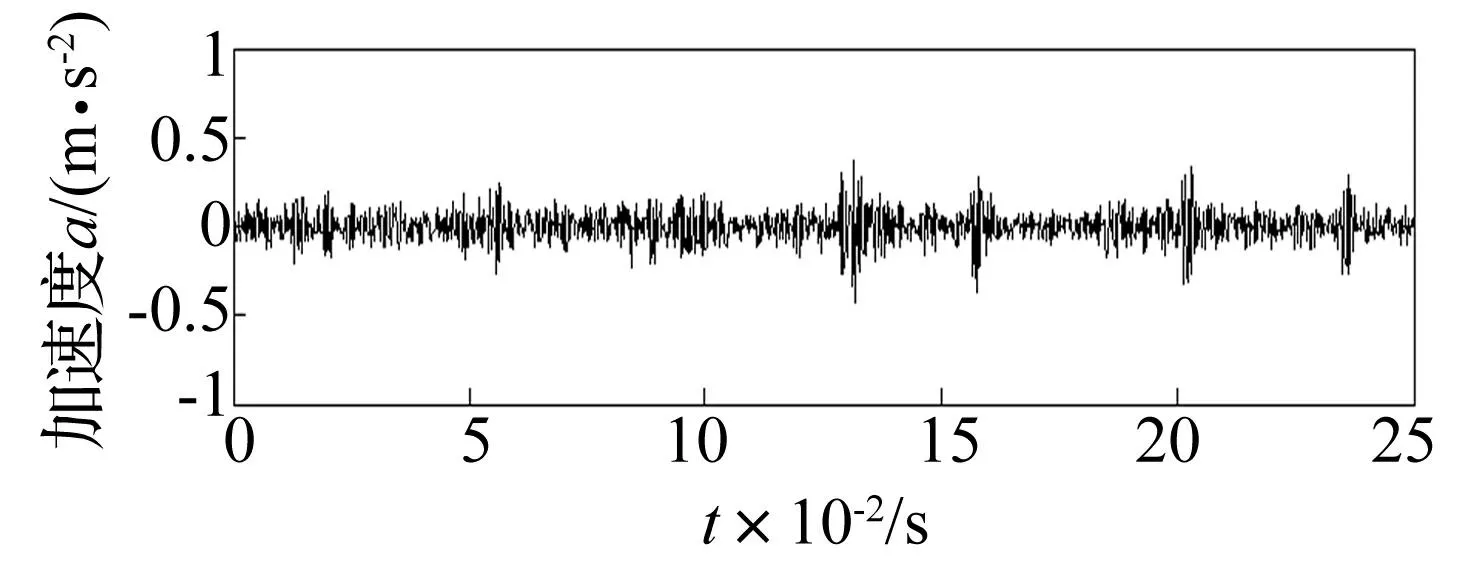
图3 断齿齿轮振动信号的时域波形 Fig.3 The time domain waveform of broken gear vibration signals
首先对各样本的原始信号进行LCD分解,由于齿轮的故障信息主要集中在高频段,因此,可选取前四个ISC分量,并对各分量求取奇异值,分别标记为X1,X2,X3,X4。将所得的奇异值组成特征向量,以此作为分类器的输入进行模式识别。各类数据可以提取出200组奇异值,每组奇异值为4个。为了充分说明该方法在小样本条件下的优越性,各类别状态选择10组数据作为训练样本,其余的为测试样本。首先利用10组训练样本建立VPMCD初始预测模型,接着第一阶段选择初始伪标识样本分别为20、40、60、80、100、120、140、160和180组,然后通过第二阶段学习选择出伪标识样本,其选择结果如表2所示,最后第三阶段用伪标识样本和已知样本更新初始预测模型进行模式识别,得到不同伪标识样本容量下的分类结果,从而完成了ISVPMCD分类。其识别结果如图4所示。
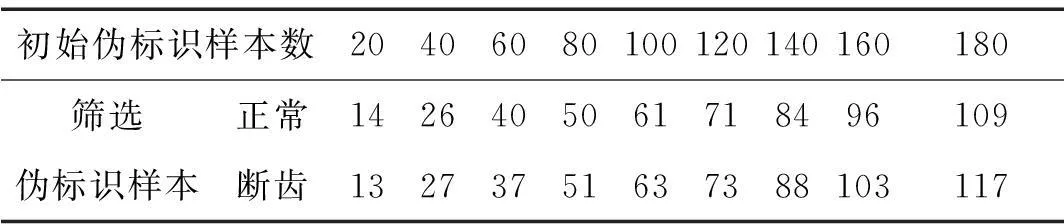
表2 齿轮两种状态筛选出的伪标识样本
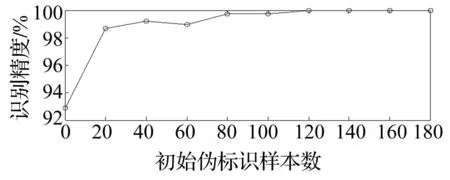
图4 不同初始伪标识样本下的ISVPMCD识别精度 Fig.4 The recognition accuracy of ISVPMCD under initial pseudo labeled samples with different sizes
由于训练样本只有10组,很难满足实际情况的需要,因此通过一定准则从未知样本中选出初始伪标识样本,而这些初始伪标识样本的选择可能具有偶然性,使得带来大量的错误信息,从而有必要按照相关性准则再次进行筛选,如表2所示,每种状态筛选出不等数量的伪标识样本。两次的选择使筛选出的伪标识样本更加可靠,把筛选出的伪标识样本添加到已知样本中再次进行训练,能充分利用未知样本中的信息,建立更加准确的数学模型。从图3中可知,选择的初始伪标识样本越多,其识别精度越高。当不选择初始伪标识样本时,即直接用原始VPMCD进行模式识别,识别精度仅为92.89%。运用ISVPMCD模式识别时,初始伪标识样本为20时,识别率已经达到了98.68%,而初始伪标识样本为120时,甚至达到了100%。由此说明ISVPMCD方法适用于小样本的机械故障诊断,且具有更好的分类结果。
在验证该方法适用于小样本情况过后,下面从分类时间方面证明该方法具有在线诊断功能。取同样的数据进行试验,各类别状态任意选择10组数据作为训练样本,其余190组为测试样本,同时与RBF神经网络、支持向量机和VPMCD进行对比。经过优化选择,设置RBF神经网络训练误差的平方和为0.00001,设置支持向量机的折衷系数为10,核函数为RBF核函数,以及设定初始伪标识样本为120组,其对比结果如表3所示。

表3 四种分类方法的分类时间和识别率对比
由表3可知,在识别率方面,支持向量机和ISVPMCD都达到了100%,优于RBF神经网络和原VPMCD方法;在分类时间方面,ISVPMCD最优,只有0.022 828 s,而支持向量机达到了0.239 079 s,仅排在四种分类器的第三位,是ISVPMCD分类时间的十倍。因此,综合考虑,ISVPMCD在保障识别精度的条件下,更适合于在线诊断,具有较强的实时性。
4结论
本文提出了一种ISVPMCD齿轮在线诊断方法,通过理论分析、仿真数据及实验数据验证得出以下结论。第一,ISVPMCD模式识别方法通过三阶段的学习,筛选出伪标识样本参与VPMCD训练,有效地解决了小样本情况诊断的缺陷;第二,通过半监督学习,使得 VPMCD充分利用未知样本中的信息,建立的预测模型更加真实,有效地提高了识别精度;第三,由于利用小样本建立的预测模型属于诊断前的前处理阶段,而ISVPMCD只是引入伪标记样本对模型更新,大大缩短了分类时间,从而为在线诊断提供了可能。
参考文献
[1]Bai S H. Semi-supervised learning of language model using unsupervised topic model[C].IEEE International Conference on Acoustics, Speech and Signal Processing-Proceedings, 2010:5386-5389.
[2]Mehdizadeh M, MacNish C. Semi-supervised neighborhood preserving discriminant embedding: a semi-supervised subspace learning algorithm [J].Computer Science, 2011, 6494:199-212.
[3]He Xiao-bin, Yang Yu-pu, Yang Ya-hong. Fault diagnosis based on variable-weighted kernel Fisher discriminant analysis [J]. Chemometrics and Intelligent Laboratory System, 2008, 93(1):27-33.
[4]Saimurugan M,Ramachandran K I,Sugumaran V,et al.Multi component fault diagnosis of rotational mechanical system based on decision tree and support vector machine[J].Expert Systems with Applications,2011,38(4):3819-3826.
[5]Xu Zeng-bing,Xuan Jiang-ping,Shi Tie-lin,et al.A novel fault diagnosis method of bearing based on improved fussyARTMAP and modified distance discriminant technique[J].Expert Systems with Applications,2009,36(9):11801-11807.
[6]Wang C C, Yuan K, Shen P C, et al., Applications of fault diagnosis in rotating machinery by using time series analysis with neural network[J]. Expert Systems with Applications, 2010, 37(2): 1696-1702.
[7]Fei Sheng-wei, Zhang Xiao-bin. Fault diagnosis of power transformer based on support vector machine with genetic algorithm [J]. Expert Systems with Applications, 2009, 36(8): 11352-11357.
[8]Raghuraj R,Lakshminarayanan S.Variable predictive models-A new multivariate classification approach for pattern recognition applications [J]. Pattern Recognition, 2009, 42(1):7-16.
[9]Peng Z, Chu F, He Y. Vibration signal analysis and feature extraction based on reassigned wavelet scalogram[J].Journal of Sound and Vibration, 2002, 253(5):1087-1100.
[10]Cheng J S,Yu D J,Yang Y. Energy operator demodulating approach based on EMD and its application in mechanical fault diagnosis[J].Chinese Journal of Mechanical Engineering, 2004,40( 8):115-118.
[11]Lei Ya-guo,He Zheng-jia,Zi Yan-yang.Application of the EEMD method to rotor fault diagnosis of rotating machinery [J]. Mechanical Systems and Signal Processing,2009, 23:1327-1338.
[12]程军圣,郑近德,杨宇.一种新的非平稳信号分析方法——局部特征尺度分解[J].振动工程学报,2012, 25(2):215-220.
CHENG Jun-sheng, ZHENG Jin-de, YANG Yu. A nonstationary signal analysis approach—the local characteristic-scale decomposition method[J].Journal of Vibration Engineering, 2012, 25(2): 215-22.
[13]Frank A, Asuncion A. UCI machine learning repository [Online], available: http://archive.ics.uci.edu/ml, May 3, 2010.
