基于模糊控制的公交信号优先控制方法研究
2016-01-08俞忠东,刘树青,沈文超等
基于模糊控制的公交信号优先控制方法研究*
俞忠东1刘树青2沈文超2徐建闽2▲卢瑞琪3
(1.北京航天智通交通科技有限公司北京 100082;2.华南理工大学土木与交通学院广州 510640;
3.广州交通信息化建设投资营运有限公司广州 510620)
摘要面对城市公共交通优先发展中遇到的交叉口公交信号优先控制问题,以降低交叉口人均延误和公交车延误为目标,提出了基于3层模糊控制器的交叉口公交信号优先主动控制模型,通过改进针对车流交通需求强度、相位放行顺序、绿灯时间优化的3层模糊推理控制器,最终输出相位绿灯放行时间延长和相序提前2种控制策略。仿真算例分析表明,与普通固定配时控制相比,公交车平均延误和人均延误分别降低27%,14.2%;与公交信号优先感应控制相比,公交车平均延误和人均延误分别降低13.7%,21.7%,说明了所提方法的有效性。
关键词公交信号优先;模糊控制;交通需求强度;公交车延误
中图分类号:U491.51文献标志码:A
收稿日期:2014-09-25修回日期:2014-12-30
基金项目*交通运输部科技项目(批准号:2012-364-X18-107)、国家自然科学(批准号:61174184)、广东省交通运输厅科技项目(批准号:科技-2013-02-055)资助
作者简介:第一俞忠东(1961-),硕士.研究方向:智能交通系统.E-mail:Yuzhd@96900.com.cn
通讯作者:▲徐建闽(1960-),博士,教授.研究方向:智能交通.E-mail:aujmxu@Scut.edu.cn
Study of Transit Signal Priority Based on Fuzzy Control
YU zhongdong1LIU shuqing2SHEN wenchao2XU jianmin2LU ruiqi3
(1.NewcomTechnologyCo.,LTD.Beijing100082,China;
2.SchoolofCivilEngineeringandTransportation,SouthChinaUniversityofTechnology,
Guangzhou510640,China;
3.GuangzhouCommunicationInformationConstructionInvestmentandOperationCo.LTD.
Guangzhou510620,China)
Abstract:For the transit signal priority control problem of an intersection in the urban public transportation development.Since the transit signal priority at intersections has obstructed the development of urban public transit priority, an active transit signal priority control model for intersection based on three layer fuzzy controller is proposed to reduce the average delay of passegners and buses. By improving the three layer fuzzy controller for the traffic flow demand intensity, the phase sequence and the green time optimization, two control strategies were generated:one is to extend the green time for transit buses and the other is to advance the phase sequence. The simulation result shows that comparing with time-fixed signal control, the proposed signal control model reduces the delay of transit buses and passengers by 27% and 14.2%, and comparing with transit-priority-oriented induction control, the proposed model makes the bus delay and the per capita delay reduced 13.7% and 21.7%, which proves the effectiveness of the model.
Key words:bus priority; fuzzy control; traffic flow demand intensity; bus delay
0引言
公交信号优先是指在“信号控制交叉口给予公交车辆相对于其他车辆的优先权,这种优先不应导致相应的信号机脱离正常运行状态”[1-2]。公交信号优先作为公交优先的重要措施之一,受到国内外交通工程学者的广泛关注。Peter G.Furth和Theo H.J.Muller[3]通过对公交信号优先条件(无条件、完全优先、有条件优先)的交通影响实验得出,无条件和完全优先导致交通延误增加,而有条件优先几乎没有影响。马万经等[4]提出了考虑时空资源组合优化的被动优先模型。张卫华等[5]提出了以人总延误最小为信号周期时长的优化目标,以相位乘客流量比和相位饱和度确定绿信比的方法建立了交叉口公交信号优先优化方法。熊驰飞等[6]以减少人的总延误和交叉口区域尾气排放量为目标,通过改变各相位绿灯时间建立的考虑排放匀速的公交信号优先控制模型。陈洪等[7]提出了1种单路口两级模糊控制器。李元元[8],张春[9],张子力等[10]建立了相序推理和公交优先策略推理双层公交优先模糊控制模型。张立东等[11]设计了公交优先模糊控制算法,该算法以公交误点数值和待行相位排队长度为输入,以当前相位绿灯延时为输出,实现了以路口总延误人数最少为目标的最优控制。王春梅[12]建立了交通需求强度推理、相序推理和公交优先策略推理3层公交优先模糊控制模型。
综上分析,以降低交叉口人均延误和公交车辆延误为目标的公交信号优先研究比较广泛,而模糊控制理论由于可以实现基于定性的模糊知识(规则)的控制和决策也被广泛应用于主动信号优先。但研究往往仅以公交车辆和社会车辆排队长度为公交通行需求考虑因子,对公交车辆载客率和晚点率缺乏定量分析,不能精确体现公交车辆的载客特征和公交车辆准点到达需求,而公交载客量和公交准点到达要求是公交车辆区别于社会车辆的重要特征[13]。因此,笔者提出1种改进的公交信号优先模糊控制算法,以公交载客率、晚点率、车辆排队长度为基础输入参数设计了公交信号优先3层模糊控制器,输出绿灯时间延长和相序提前2种控制策略,兼顾社会车辆放行需求,更加灵活有效地实现以降低人均延误和公交车延误为目标的公交信号优先控制。
1控制原则与策略
1.1控制原则
考虑公交优先通行需求、社会车辆通行需求和公交信号优先一般设计原则,以降低人均延误和公交车延误为目标,本文公交信号优先控制的控制原则如下。
1) 公交优先控制策略的执行不能引起周期和相位的改变,但相序及相位绿信比会根据公交优先策略发生改变。
2) 公交信号优先控制策略对相位绿信比的调整需满足相位最大绿灯时间及相位最小绿灯时间约束。其中,相位最小绿灯时间是为了满足行人过街要求及机动车安全通行时间预先设置的相位最小时间,相位最大绿灯时间主要是为了避免某个相位放行时间过长,导致其他相位放行能力不足。
3) 根据公交载客量、路口车辆排队长度,通过模糊控制规则给予满足优先条件的相位延长绿灯时间和相序提前两种控制策略,降低路口人均延误和公交车延误。
4) 同1周期内同1相位只能采用1种公交优先控制策略。
1.2控制策略
绿灯时间延长策略适用于当前放行相位为公交优先请求相位,相序提前适用于公交优先请求相位为待放行相位,前1种控制策略会引起相位绿信比的改变,后1种控制策略不会引起相位绿信比的改变。见图1。

图1 控制策略示意图
2模糊控制器设计
2.1交通需求强度模糊控制器
1) 公交车通行需求。根据公交车行驶特点,公交车辆的通行需求计算依据公交满载率及公交晚点率2个基础数据,当公交车满载率越高和晚点率越大时,通行需求越高。计算公式如下。

f和l均为正实数且和为1,分别表示公交车载客率和晚点率动态权重系数。
2) 社会车辆通行需求。当车流单车道最大排队长度接近或超出路段长度时,需要及时放行,防止车辆排队溢出到上游交叉口导致交通拥堵扩散。因此,对社会车辆通行需求的计算用单车道最大排队长度与路段长度之比表示。
式中:Dcij为交叉口i相位j车流车辆拥挤度;lij为交叉口i相位j车流单车道最大排队长度;Lij为交叉口i相位j车流所属路段长度。
3) 相位放行交通需求。取公交车通行需求为Dbij和社会车辆通行需求Dcij作为控制器输入控制量,选取高斯隶属度函数作为控制器输入量隶属度函数,三角形隶属度函数作为控制器输出量隶属度函,通过模糊控制输出交叉口i相位j车流交通需求Dij。将Dbij和Dcij分别在[0,10]和[0,1]模糊化为5个模糊子集{VS,S,M,L,VL},论域分别为{0,2.5,5,7.5,10}、{0,0.25,0.5,0.75,1},分别表示需求强度很小、小、中等、大、很大。模糊控制规则见表1,交叉口i相位的交通放行需求强度Di取相位中所有车流放行需求强度的最大值。

表1 交通需求强度模糊控制规则
2.2相序优化模糊控制器
相序优化模糊控制器的作用是在当前周期内未放行相位中决定下1个放行相位,如果公交优先所在相位放行请求强,则可以通过改变相序提前放行的方式,实现公交优先控制。以典型十字交叉口为例,暂不考虑右转车流的控制,相序变换规则如下。
1) 1个周期循环内1个相位只能放行1次。
2) 交通需求强度大的相位优先作为下1个放行相位。
3) 相同交通需求强度条件下,能够保持当前放行相位车流放行连续性的相位优先放行。
4) 相同交通需求强度条件下,如果当前放行相位含直行车流,则不包含逆时针方向第1个进口直行车流的相位优先放行。
5) 相同交通需求强度条件下,如果当前放行相位含左转车流,则不包含逆时针方向第3个进口直行车流的相位优先放行。
上述相序变换规则中第1,2条是相序变换基本规则。第3条规则考虑存在搭接相位的相位方案时尽量不要打乱交通流的跨相位连续性,减少相位变换损失时间,如图2(a)图中A和B相位的西进口直行车流跨相位连续放行。第4,5条规则保证相同交通需求强度下尽量避免当前放行相位尾车与下1个放行相位的头车发生交通碰撞,如图2(b)图中按照东、北进口顺序放行,则东进口放行尾车与北进口启动头车之间容易发生碰撞,如果换为北、东进口顺序放行,则碰撞概率大大降低,这主要取决于车流到达和离开交叉口内部交通流冲突点的时间差。以上相序变换规则从第1~5条优先级依次降低。

图2 相序变换规则(防断流防冲突)
2.3绿灯时间优化模糊控制
绿灯时间优化模糊控制器的输出为当前放行相位绿灯时间优化策略,即延长相位绿灯时间Δg(Δg为正(负)表示绿灯延长时间(缩短)),输入为交通需求模糊控制器和相序优化模糊控制器的输出,即当前放行相位交通需求强度Dg和下1个放行相位的交通需求强度Dn。将交通需求强度在[0,1]糊化为5个模糊子集{VS,S,M,L,VL},分别表示很小、小、中等、大、很大,使用三角形隶属度函数。输出Δg最小值为-15 s(表示绿灯时间缩短15 s),最大值为15 s(表示绿灯时间延长15 s),在[-15,15]模糊化为5个模糊控制子集{VN,N,Z,P,VP},使用梯形隶属度函数,模糊推理规则见表2。

表2 公交优先决策模糊控制规则
3控制流程
假设路口监测器能够较为准确的检测车辆排队长度、公交车辆到达、公交载客量、公交晚点时间,不考虑行人和非机动车的干扰,信号控制机具有相应的计算和判断能力,记gimin,gimax,gi为放行相位i最小、最大、初始绿灯时间,控制流程逻辑见图3。

图3 控制流程逻辑图
第1步。当相位放行时间达到gimin时,根据路口排队长度、公交载客率、晚点率,计算所有待放行相位交通需求强度;如果周期内无待放行相位,则计算所有已放行相位交通需求强度。
第2步。将第1步计算结果输入第2层模糊控制器,得到下1个放行相位n,如果相位为n下1个周期的初始相位则转入第5步,否则继续。
第3步。将当前放行相位和下1个放行相位的交通需求强度输入第3层模糊控制器,确定当前相位的绿灯延长时间Δg。当前相位的实际放行时间为git=gi+Δg。Δg为正表示当前绿灯延长时间为正,绿灯放行时间延长;Δg为正表示当前绿灯延长时间为负,绿灯放行时间缩短。
第4步。校验Δg,如果git>gimax,则令git=gimax;
第5步。待当前相位(周期)放行结束后,相位n开始放行,并转入第1步。
4仿真验证
4.1与固定配时控制路口的仿真对比
以十字交叉口为例,分析采用本文公交优先控制后路口控制效果,与固定配时路口运行效果做对比,以验证本文方法的有效性。路口集合形状及相位设计同见图4,交叉口进口流量见表3,假设单车道饱和流量为1 500 辆/h。根据韦氏单交叉口配时方法确定路口相位控制方案为北单放32 s,南单放38 s,东单放34 s,西单放36 s,交叉口周期140 s,同时将此配时作为交叉口采用公交优先控制的相位初始配时方案。公交车在北进口到达率为0.03 辆/s,南进口到达率为0.04 辆/s,东西进口无公交车到达,仿真运行20个周期,仿真结果对比见图5。
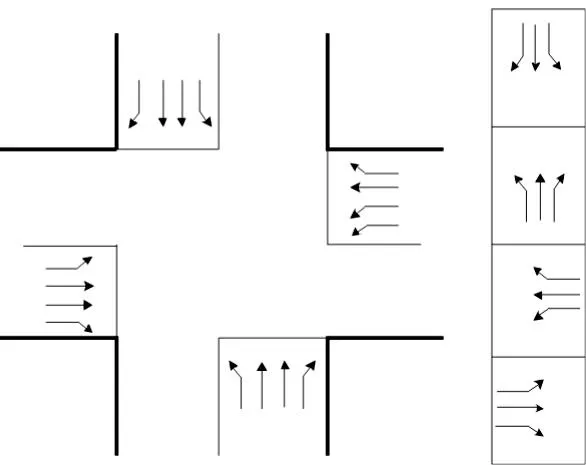
图4 路口几何形状及相位设计

进口道流向小汽车/(辆·h-1)公交车/(辆·h-1)车道数南北东西右转213直行889左转85右转114直行705左转209右转100直行330左转689右转89直行706左转20210912400121121112121
分析图5中的数据,对有公交的进口采用模糊控制公交信号优先后,南北进口公交车辆平均延误分别降低27.5%、3%,交叉口人均延误降低14.2%,且东、南、北进口的车辆平均延误均有不同程度降低,西进口车辆平均延误增加14.7 s,但路口整体平均延误降低1.57 s。上述分析结果说明论文提出的方法对比固定配时控制,能够降低公交车辆延误和路口人均延误,虽然会增加非公交相位的社会车辆平均延误。当公交相位带来的社会车辆延误降低幅度大于非公交相位造成的社会车辆延误增加幅度时,交叉口整体社会车辆延误也会随之降低。

图5 仿真结果
4.2与公交信号优先感应控制路口的仿真对比
以广州市天河路-体育东路交叉口为例,建立路口仿真模型,验证论文研究方法与公交信号优先感应控制对比效果。基于公交信号优先感应控制的逻辑是通过铺设在公交车道上的车辆检测器来检测该进口道的公交车辆到达情况,从而根据车辆的到达情况使该进口道的信号显示时间适应于该进口道的交通需求。天河路与体育东路交叉口各进口道上的检测器铺设情况见图6。深色的车道代表BRT专用车道。交叉口信号配时方案采用3相位配时方案,信号周期采用可变式信号周期。相位1为东西直行,相位2为东西左转,相位3为南北直行。该交叉口的相位放行顺序为相位1、相位2、相位3。仿真效果图见图7。
分析图8中的仿真结果数据,与路口公交信号优先感应控制对比,公交所在相位公交车延误分别降低9.7%,13.1%,路口人均延误降低21.7%,交叉口车辆平均延误降低4.2%。这说明了论文选取的模糊控制器输入参数中社会车辆排队长度和公交车载客量因子的合理性,在实现公交信号优先的同时,尽量降低公交车优先对社会车辆延误增加的影响。

图6 天河路-体育东路交叉口各进口道检测器铺设情况

图7 仿真效果图

图8 仿真结果
5结束语
笔者提出了基于3层模糊控制器的交叉口公交信号优先主动控制改进模型,将公交车载客率和晚点率以及路口车流排队长度作为相位放行需求计算的输入参数,并通过合理的模糊控制规则,
输出相位绿灯放行时间延长和相序提前两种控制策略,实现降低交叉口人均延误和公交车延误的控制目标。仿真算例分析表明,与无公交信号优先控制和公交信号优先感应控制相比,本文控制方法有效地降低了交叉口公交车延误和人均延误,限制社会车辆延误增加。
笔者选取的模糊控制器输入参数公交车载客率和晚点率在现有公交及信号控制设施中较难准确获取,但基于现有公交客流检测技术和车路交互技术是可实现的,因此基于本文方法的技术实现是下一步研究的方向。此外,在干道双向绿波协调控制下的路口尝试采用模糊控制算法进行公交信号优先也是下一步研究的方向。
参考文献
[1] Transit Cooperative Research Program.Improved traffic signal priority for transit[R].TCRP PROJECT A-16,Washington DC:Transportation Research Board,National Research Council,1998.
[2]Bertini R L,Glasgow C,Peters J.An overview of transit signal priority[R].Washington DC:ITS America,2004.
[3]Peter G.Furth,Theo H J.Muller.Conditional bus priority intersection-better service quality with less traffic disruption. Transportation Research Board,2000,5(4):17-24.
[4]马万经,杨晓光.基于时空优化的单点交叉口公交被动优先控制方法[J].中国公路学报,2007,20(3):86-90.
MA Wangjing,YANG Xiaoguang.Intersection bus passive priority control method base on the time and space optimization[J].China Journal of Highway and Transport,2007,20(3):86-90.(in Chinese).
[5]张卫华,陆化普.公交优先的信号交叉口配时优化方法[J].交通运输工程学报,2004,4(3):49-53.
ZHANG Weihua,LU Huapu.Optimization method with bus priority at signalized intersection[J].Journal of Traffic and Transportation Engineering, 2004,4(03):49-53.(in Chinese).
[6]熊驰飞,吕智林,叶嫣.考虑排放因素的公交信号控制优化方法[J].交通信息与安全,2012,17(4): 75-79.
XIONG Chifei,LV Zhilin,YE Yan.Emission factors to consider bus signal control optimization[J].Journal of Transport Information and Safety,2012,17(4):75-79.(in Chinese).
[7]王正斌,夏利民.单交叉口自适应公交优先控制[J].中国公路学报,2010,23(4):84-90.
WANG Zhengbin,XIA Limin.Single intersection adaptive bus priority control[J].China Journal of Highway and Transport,2010,23(4):84-90.(in Chinese).
[8]陈洪,陈森发.单路口交通实时模糊控制的一种方法[J].信息与控制,1992,21(2):74-78.
CHEN Hong,CHEN Senfa.A method of real time traffic fuzzy control of single intersection[J].Information and Control, 1992,21(2):74-78.(in Chinese).
[9]李元元,巨永锋.城市信号交叉口公交优先及模糊控制策略[J].电子技术应用,2006(15):155-156,159.
LI Yuanyuan,JU Yongfeng. Intersection transit priority and fuzzy control strategy in city[J].Application of Electronic Technique,2006(15):155-156,159.(in Chinese).
[10] 张春.基于公交优先的单点交叉口信号控制改进方法研究[D].北京:北京交通大学,2011.
ZHANG Chun.Research on the improved method of single intersection signal control based on bus priority[D]. Beijing: Beijing Jiaotong University,2011.(in Chinese).
[11]张子力,韩印,易若晨.模糊自适应控制理论在公交优先信号控制中的应用[J].交通与运输:学术版,2010(2): 81-83.
ZHANG Zili,HAN Yin,YI Ruochen. Adaptive fuzzy control theory application in signal priority control bus[J].Traffic & Transportation, 2010(2): 81-83.(in Chinese).
[12]张立东,王英龙.公交优先模糊控制算法研究[J].智能系统学报,2007,2(3):59-62.
ZHANG Lidong,WANG Yinglong.Bus priority research on fuzzy control algorithm[J]. CAAI Transactions on Intelligent Systems,2007,2(3):59-62.(in Chinese).
[13]王春梅.城市道路交叉口公交优先信号控制技术研究[D].长沙:湖南大学,2010.
WANG Chunmei.Study on the technology of city road intersection,bus priority signal control[D].Changsha:Hunan University,2010.(in Chinese).
