现代船舶避碰系统研究进展
2016-01-08江立军王国峰赵永生
江立军, 郑 凯, 王国峰, 赵永生
(1. 海军驻大连地区军代表室,辽宁 大连 116002;2.大连海事大学 信息科学技术学院, 辽宁 大连 116026)
现代船舶避碰系统研究进展
江立军1,2,郑凯2,王国峰2,赵永生2
(1. 海军驻大连地区军代表室,辽宁 大连 116002;2.大连海事大学 信息科学技术学院, 辽宁 大连 116026)
摘要:船舶避碰系统可在船舶存在碰撞风险时给出避碰决策,是确保船舶安全航行的重要系统,其发展程度在一定程度上体现了现代船舶技术的发展程度。通过对现代船舶避碰系统的发展状况及其相关子系统的研究进展情况进行剖析,阐述了现代船舶避碰系统存在的主要问题,指出了智能化、规范化和集成化避碰系统需重点发展的方向。
关键词:船舶;避碰系统;导航系统;信息融合
0引言
近年来,人们对水资源的重要性的认识逐步提高,世界各国在水资源开发领域中的投入也在日益增加,极大地促进了船舶技术和船舶制造业的发展。此外,世界经济全球化和贸易自由化也必将进一步推动航运业的繁荣。作为水资源开发和运输的主要工具,舰船正朝大型化和高速化方向发展,这势必导致船舶操控较以往更为复杂;海上交通越来越频繁,航道中船只密度越来越大,也给船舶操纵带来了巨大压力。这些状况均对确保船舶安全航行提出了更高的要求。
国际海事组织(International Marithime Organization, IMO)一直致力于解决船舶碰撞和安全问题。早在1910年,世界主要海运国家于布鲁塞尔召开的国际海事会议上第一次通过了《1910年国际海上避碰规则》,后经历数次修改最终形成了以1972年《国际海上避碰规则》(COLREGs)为基础的海上避碰规则[1-3]。此外,IMO还强制要求商船安装全球定位系统(Global Positioning System, GPS)、电子海图、船舶自动识别系统(Automatic Identification System, AIS)、雷达和声纳等电子导航定位设备,以及建立船舶交通服务(Vessel Traffic Services, VTS)中心网络来确保航行安全,降低航行风险[1,2,4]。即使这样,仍有数据表明,国际上每年失事船只中有超过40%是因碰撞导致的,且其中近80%的事故是人为原因造成的[5-7]。显然,若仍在现有导航设备的基础上采用人工驾驶方式进行避碰决策与操纵,将不能起到明显减少人为事故的效果。因此,为进一步减少人为因素造成的船舶碰撞事故,在提高船舶驾驶员素养和能力的同时,还必须增强船舶导航和控制系统的自动化水平,使其能够协助驾驶员进行避碰决策和避碰操纵。
近年来,随着军事、深远勘探等的需求日益增长,以水面无人艇、无人潜航器为代表的无人平台得到了快速发展。这些无人平台在工作时不可避免地会遇到障碍和危险,因此能够自主地处理航路上的障碍和危险也是对无人平台的基本要求[8]。显然,无人平台对避碰提出的要求更高,要求不但能够自主地发现航路上的障碍和危险,进行避碰决策,以便及时获得能够躲避危险的航路规划,而且还能够按照所规划的航路行驶。这就使得自主避碰技术成为影响无人平台性能的关键。
此外从现代船舶避碰系统的组成入手综述避碰系统各组成部分关键技术的发展状况,并基于当前发展趋势对现代船舶避碰系统的发展提出几点展望。
1现代船舶避碰系统的组成

图1 现代船舶避碰系统
现代船舶避碰系统主要由信息采集系统和避碰决策系统2部分组成[1-2]。其中:信息采集系统负责通过本船装载的导航系统采集本船和他船的信息,以方便确定本船和他船的位置及位置变化,判断一定范围内本船和他船的会遇局面;避碰决策系统则根据这些导航信息进行风险评估,判断船舶航行时可能产生的风险,并进行决策,以获得航行风险小的操纵方案。以下将针对这2部分的发展现状进行讨论。
2现代智能导航设备的发展
根据IMO的规定,商船必须安装GPS、电子海图系统、AIS、雷达系统和声纳系统等导航定位设备。这些导航设备已具备一定的协助驾驶员进行避碰决策的功能。如电子海图结合GPS和AIS已经能够将本船和一定范围内的他船信息显示在同一张海图上,基于这些数据,海图系统就可根据船舶间最近会遇距离(DCPA)和最小会遇时间(TCPA)给出碰撞危险提示,辅助驾驶员进行避碰决策[9]。同样,具有自动标绘功能的雷达系统(ARPA)也可通过雷达回波探测水面船舶的位置,并给出他船与本船间的DCPA和TCPA参数,进行辅助避碰决策[10]。此外,还有学者研究了基于视频图像的避碰方法,并应用于船桥主动避碰决策系统中[11-12]。虽然AIS受天气影响较小,且能避免地形引起的盲点,但是其只对开启AIS设备的船舶有效。ARPA工作范围相对有限,当工作范围内有较多船舶或气象环境恶劣时,雷达回波会受到干扰,这时ARPA数据是不准确的。而视频采集受光线、天气等因素影响,无法全天候工作。这些原因直接制约了单一导航设备的应用范围。
针对上述问题,已有一些学者尝试将多个导航设备的信息融合在一起来考虑船舶避碰问题。研究人员首先想到的是利用信息融合手段强化单个导航设备的导航精度。较常见的是利用惯性导航、天文导航、无线电导航及GPS导航构成的组合导航系统实现对本船位置和姿态运动信息的精确检测[12-14]。而在航路的信息检测方面,目前研究较多的是将雷达的信息与AIS及电子海图的信息融合[15]。由于雷达传回的图像与电子海图有一定的相关性,因此想到将2种导航设备提供的信息显示在同一界面以方便驾驶员观察。文献[16]对电子海图与雷达叠加的设计方案进行了讨论,给出了可实现的叠加设计方案。文献[17]分析了电子海图与雷达图像叠加时产生误差的原因,提出了电子海图误差的修正方法。文献[18]根据雷达的扫描范围,通过墨卡托投影变换获取电子海图的显示范围,并对电子海图的比例尺进行调整,实现雷达图像和电子海图的匹配。而结合雷达和AIS信息则不但可以避免雷达盲区和回波信号误差,又可解决AIS的时效性等问题[19]。文献[20]讨论了AIS和雷达信息融合时坐标位置的计算方法。文献[21]采用统计加权法对雷达信息和AIS信息进行了航迹关联判定。文献[22]和文献[23]利用模糊推理的方法融合雷达信息和AIS信息,对目标进行了关联评判,并利用数值仿真验证了此方法的有效性。文献[24]使用Levenberg-Marquardt改进型BP神经网络算法关联AIS信息与雷达目标信息,取得了良好的效果。文献[25]也对雷达和AIS信息融合时的关键技术问题进行了讨论,设计了一种分布式融合模型,采用了墨卡托投影、MK-NN以及加权融合等理论和算法,进行了信息融合功能的设计与实现,仿真结果表明,与传统手段相比,该模型能获取更加准确的数据。总的来说,现有的对船载导航设备信息进行融合的研究工作还主要集中于对2个导航设备的信息进行融合,信息融合的广度有一定局限性。
为了集成多个导航设备,综合导航系统(INS)和综合船桥系统(IBS)应运而生[26]。其中:INS主要用于处理惯性导航设备和各种卫星导航设备的信息,对船舶进行定位和姿态测量;而IBS则集成了更多的功能,如导航、避碰和自动驾驶等。现代IBS已经发展到第4代,如挪威Norcontrol公司的DB—2000型IBS、英国船商公司的Navi-Bridge 3000型IBS、德国Atlas公司的NACOS45—2系列IBS和美国Sperry 公司的VT2100型IBS,均具有相当的智能化特征,不仅集成了电子海图、导航定位、自动操舵功能,还能实现自动避碰、自动报警和主机遥控等功能[26-28]。国内在IBS方面的研究虽然起步较晚,但取得了较快发展,如大连海事大学推出的V.Dragon—3000A 型综合船桥模拟器、天津航海仪器研究所研制成功的船舶自动操舵仪等。不过这些研究还均局限于单一功能领域,未实现IBS系统功能[26-28]。
显然,现代导航系统有了长足发展,为船舶进行自主避碰提供了有利条件,但可以看到这些导航设备还是基于不同体系、不同标准的,目前还没有一套系统能够融合多种导航信息而用于避碰。
3先进避碰算法的发展
船舶航行安全主要体现在安全避碰过程,现有针对船舶安全的研究工作也主要集中在避碰方面。早在20世纪五六十年代,已有学者从事避碰等方面的研究工作,COLREGs的制定标志着船舶避碰研究工作进入了一个崭新阶段。对船舶避碰的研究可分为碰撞风险评估和避碰决策两方面。其中:碰撞风险评估是指对即将发生的碰撞及其损害程度进行预计,而避碰决策则主要研究如何通过船舶操纵减小碰撞风险。
3.1避碰风险评估
显然,碰撞风险评估与船舶碰撞风险程度确定标准有关,不同的评估标准产生了不同的评估方法,比较常见的是基于DCPA和TCPA来判定碰撞危险程度。文献[29]首先提出了利用DCPA和TCPA进行加权来确定船舶碰撞风险。文献[30]认为本船与他船间距的富裕量越小、时间富裕量越少,危险程度越高,同时给出了评价碰撞危险程度的算法。文献[31]也利用DCPA和TCPA综合判定船舶碰撞风险,还将服从正态分布的DCPA测量误差考虑在内。由于受量纲和船舶相对位置的限制,简单对DCPA和TCPA进行加权处理来判定船舶碰撞风险并不完全合理,因此各国学者又将智能方法引入到碰撞风险的评估中,如神经网络方法[32-34]、模糊推理方法[34-36]、可拓集方法[37]和专家系统方法[33,38-39]等。这些智能化方法对促进船舶碰撞风险评估起到了积极作用。
船舶领域是近年来用于进行船舶碰撞风险评估的有效手段。文献[40]首次提出了船舶领域的概念,给出了适用于狭窄水域的椭圆形船舶领域模型和相应尺寸。文献[41]通过对北海南部水域进行交通观测和统计研究,并考虑国际海上避碰规则的影响,建立了开阔水域的船舶领域Goodwin模型。文献[42]通过平滑船舶领域边界,提出了便于仿真和应用的圆形船舶领域,以便解决Goodwin模型边界不连续、难以仿真和应用等问题。文献[43]提出了保持本船领域不受侵犯而设置的驾驶员需提前采取适当避碰行为的船舶动界。这些关于船舶领域的研究主要通过提取特定水域内的航行密度、所观测船舶的大小和速度等信息确定船舶领域的形状和大小。而实际上因船舶航行状态不断变化,船舶领域的形状和大小也应随之改变。Pietrzykowski等[44-45]将来船方位按不同的间隔角度进行了离散化,将获得的经验数据在不同来船方位上进行统计分析,得到了多边形船舶领域。文献[46]将船舶领域视为船舶几何尺寸和船速的解析函数,给出了拥挤水域内可变尺寸的船舶领域计算方法。文献[47]提出一种复杂的六边形船舶领域模型,不仅考虑了船舶的几何尺寸和船速因素,而且考虑了船舶回转参数,使得该模型更有利于从事避碰决策和优化。Kijima等将阻挡区域和瞭望区域考虑进船舶领域的构造中,获得了一种新的船舶领域构造方法。智能化方法也在计算船舶领域过程中得以应用,如利用模糊推理来计算船舶领域可获得船舶领域的模糊边界;神经网络方法也被用于学习两船间的距离、相对方位、来船航向等因素对船舶领域的影响。文献[48]则基于停船视距,针对长江下游航道条件和船舶特性给出了一种新的船舶领域计算方法。此外,文献[49]还应用船舶领域来研究内河航道的饱和度评价问题,也获得了良好的结果。这些风险评估方法给出的结果均是绝对值,且大多针对船与船之间的碰撞问题,船与桥梁、暗礁、码头等不可航行区域的碰撞问题研究则不多见。
3.2避碰决策
现有碰撞风险评估技术已为避碰决策奠定了坚实的基础,现代避碰决策技术已向智能化方向发展。应用较多的避碰决策方法是专家系统,如英国利物浦大学[39]、东京商船大学[50]、广州舰艇学院[51]等研究单位均研究了用于船舶避碰的专家系统,这些避碰专家系统采用咨询式辅助避碰手段,针对不同会遇局面给出避碰决策结果,供驾驶员参考。李丽娜等[52-54]提出拟人化智能避碰决策方法,模仿经验丰富的船舶驾驶员(避碰专家)对周围环境和危险局势的分析判断以及在避碰决策中的思维,自动产生超越避碰专家所能提出的既安全又经济的避碰决策,这种方法较专家系统更为快速,能在短时间内进行局面判断,精确计算及预测避碰效果,提供决策支持,可最大限度地提高目标船与本船的最近会遇距离,既可用于单船避碰,又可用于多船避碰。大连海事大学郑中义和孙立成等[55-57]分别从信息熵理论和神经网络理论出发研究了船舶避碰决策方法。杨神化等将单个船舶描述为一个智能体,应用多智能体理论研究了船舶避碰决策方法,在面对多船会遇局面时还可用于多船的协商和协作。
此外,避碰问题也是水面和水下无人平台所面临的问题之一。在对无人平台避碰系统的研究中,一般将避碰问题处理为障碍检测问题和航迹规划问题。Campbell等[8]对这2个问题进行了研究,从中可以看出,在对无人平台的避碰研究时吸收了大量水面船舶避碰和机器人避障等领域的研究成果,其中基于模糊逻辑和COLREGs的避碰研究工作[58-62]占据了主要地位。
4现代船舶避碰系统发展方向
通过以上分析,可以归纳出现代船舶避碰系统正在朝智能化、规范化和集成化方向发展。
4.1导航信息的智能融合
本船导航信息的融合现已基本实现,可以对本船所载位置传感器、姿态传感器等进行信息集中处理,从中获得精确的本船信息。而他船的运动状态则靠AIS、雷达及声纳等获取。该项工作可提供较为精确的他船动态的估计与预测,从而为避碰时掌握他船信息提供保障。这里难度较大的是基于电子海图、雷达及声纳对航道及地理水文信息进行的信息融合工作。该项工作可对船舶航行的工作环境进行精确描述,但与本船和他船运动状态信息融合不同的是,其要对二维平面信息进行融合,数据处理较为繁杂。若此项工作同本船及他船的导航一起处理,可在一定程度上实现船舶综合导航,为进一步进行避碰奠定基础。因此,将本船、他船及地理水文信息进行整体融合是智能导航系统的发展方向。
4.2导航信息的规范化
通过上述讨论可以发现,进行导航信息融合需要对不同导航设备的数据进行处理。这些数据有的是6自由度的,有的是二维的,由于来源不同,还会导致数据的时序不同。实现导航信息融合的前提条件是将所有的导航数据在一套体系下进行描述。特别是在避碰时采用的二维数据的描述方法,避碰时更关注这些二维数据能否给出适于船舶航行的区域轮廓,而不是各导航设备所提供的全部信息。构建避碰用导航信息描述规范,将对船舶避碰提供有利的数据平台支撑,因此导航信息规范化也将成为船舶避碰系统的一个发展方向。
4.3避碰系统与船舶其他系统的集成
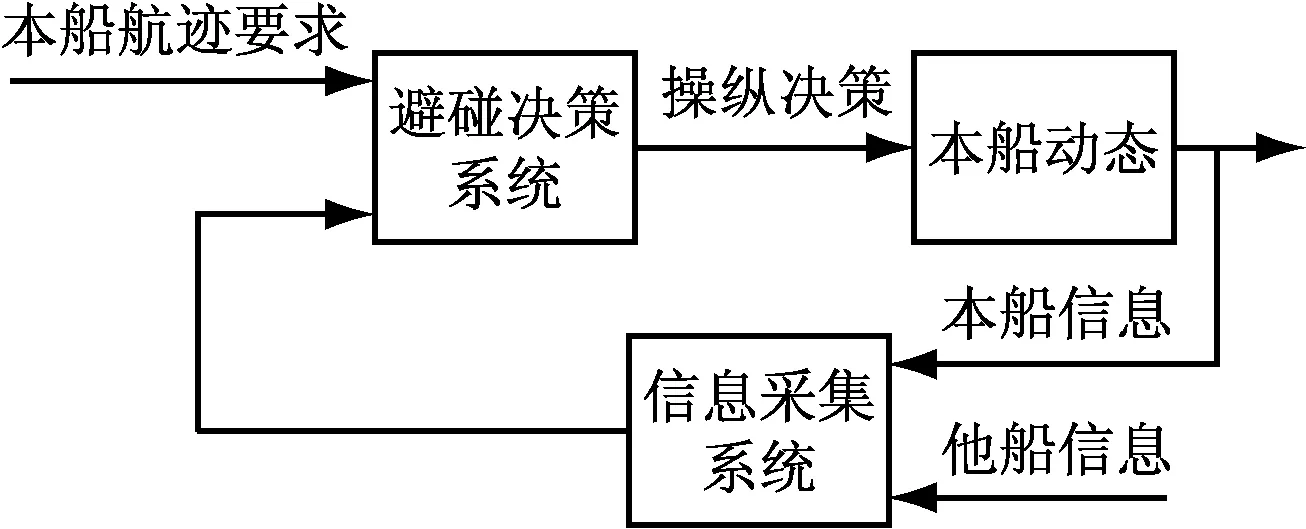
图2 具有闭环结构的船舶避碰系统
图1给出的避碰系统结构只能向驾驶员提供避碰决策参考,实际船舶操纵仍由驾驶员来完成,这是因为现有避碰系统仅将其功能定位于躲避障碍,而未从船舶航行目的考虑系统功能。船舶躲避障碍并非避碰系统的全部功能,还应考虑在躲避障碍之后尽快回到原有航向,以确保船舶航行不受干扰。因此,避碰系统还应考虑本船动态控制及航行需求,以构成图2所示的闭环结构。
图2给出的避碰系统结构可将船舶航行与避碰功能结合,避碰决策系统也是船舶航行控制系统,不但能够在出现障碍和碰撞风险时根据本船当前状态及本船动态给出避碰操纵,还能够根据船舶航行需要对避碰操纵进行优化,给出确保航行安全下的航迹最优控制结果。要实现这些目标,就需要对避碰决策系统与船舶自动控制系统、船舶操纵系统进行集成。因此,与船舶其他系统的集成也将成为避碰系统的一个发展方向。
显然,上述发展方向亦反映了当前船舶避碰系统中存在尚未解决的技术问题,这些问题制约了避碰系统由人为主导向自主决策的发展。因此,要改善由人为因素引起的船舶航行风险,还需从这3个方面入手积极推进船舶自主避碰系统的发展。
5结语
概述了近年来船舶避碰系统的发展状况,从现有避碰系统的组成入手,综述了现代船舶导航系统和避碰算法的研究进展。在此基础上,总结了船舶避碰系统的主要研究成果和主要特点,深入剖析了其存在的问题,并针对现代船舶避碰系统的特点提出了3个具有重要理论意义和实际价值的船舶避碰系统发展方向。
参考文献:
[1]吴兆麟, 朱军. 海上交通工程[M]. 大连: 大连海事大学出版社, 2009.
[2]吴兆麟. 船舶避碰与海上安全研究[M]. 大连: 大连海事大学出版社, 2006.
[3]COLREGs Preventing Collisions at Sea. [EB/OL]. [2014-09-14], http://www.imo.org/OurWork/ Safety/Navigation/Pages/ Preventing-Collisions.aspx.
[4]Maritime Safety. [EB/OL]. [2014-10-10], http://www.imo.org/OurWork/Safety/Pages/Default.aspx.
[5]Pouzranjnai M. Anaylsis of Human Error in Coordinating Ship’s Collision Avoidance Action[C]. The 2nd International Conference on Collision and Gounding of Ships, 2001.
[6]孙立成, 王逢辰, 夏国忠, 等. 驾驶员避碰行为的统计研究[J]. 大连海事大学学报, 1996, 22(1):1-6.
[7]陈立家, 黄春娥, 曾伟伟, 许毅, 黄立文. 基于电子海图的船舶避碰技术的研究[J]. 武汉理工大学学报:交通科学与工程版, 2013, 37(5):979-983.
[8]Campbell S, Naeem W, Irwin G W. A Review on Improving the Autonomy of Unmanned Surface Vehicles Through Intelligent Collision Avoidance Manoeuvres[J]. Annual Reviews in Control, 2012, 36:267-283.
[9]常会振. 船舶导航雷达发展趋势的研究[J]. 中国水运, 2013, 13(1):6-7.
[10]郑元洲, 吴卫国, 徐海祥. 基于图像信息检测的船-桥智能避碰系统研究[J].武汉理工大学学报-交通科学与工程版, 2012, 36(4):731-735.
[11]Zheng Yuanzhou,Wu Weiguo. Intelligent Ship-Bridge Collision Avoidance Decision-making System Research Based On Video Information Detection[C]. Proceedings of International conference on Computer Science and Service System, 2011.
[12]吴凤柱, 何矞, 焦旭, 等. GPS/SINS 紧组合导航系统信息融合技术研究[J].电子技术应用, 2013, 39(2):67-69.
[13]周坤芳, 吴晞, 孔键. 紧耦合GPS/INS 组合特性及其关键技术[J].中国惯性技术学报, 2009, 17(1):42-45.
[14]杨常松, 徐晓苏, 汪丽云, 等. 信息融合技术在INS/GPS/DVL组合导航中的应用研究[J]. 中国惯性技术学报, 2006, 14(5):39-43.
[15]杨晓, 廉静静, 刘彤. 海图雷达(Chart Radar)在航海中的应用[J]. 航海技术, 2012(5):38-40.
[16]刘维亭, 马继先,庄肖波. 电子海图系统中雷达图像与海图图形叠加技术研究[J]. 中国航海, 2005(1):59-62.
[17]徐关勇, 曹万华. 电子海图与雷达图像及目标的精确叠加显示研究[C]. 中国适船工程学会电子技术学术委员会2006学术年会论文集, 2006.
[18]杨功流, 窦玉宝, 郑荣才. 一种雷达和电子海图图像叠加方法[J]. 中国惯性技术学报, 2010, 18(2):181-184.
[19]王晨熙, 王晓博, 朱靖, 等. 雷达与 AIS 信息融合综述[J]. 指挥控制与仿真, 2009, 31(2):1-4.
[20]徐志京,王解先. AIS与雷达目标信息融合中坐标位置的计算方法[J]. 上海海事大学学报, 2005, 26(4):78-81.
[21]林长川. 雷达与AIS目标位置信息融合方法的研究[J]. 中国航海, 2002, 50(1):22-25.
[22]林长川, 陈朝阳, 洪爰助,等. 雷达与AIS目标航迹模糊关联与统计加权合并融合方法的探讨[J].中国航海, 2003(4):70-73.
[23]林长川, 林海, 李丽娜,等. AIS与雷达目标信息模糊融合处理研究[J]. 仪器仪表学报, 2008, 29(4):303-306.
[24]欧阳萍,胡晓瑞,林长川,等. 基于BP神经网络的AIS与雷达信息关联算法研究[J]. 中国水运, 2013, 13(7): 77-79.
[25]冯涛, 卢红洋, 于俊逸. AIS与雷达信息融合关键技术的研究[J]. 中国水运, 2013, 13(8): 79-81.
[26]汪益兵, 蒋元星. 综合船桥系统的开发及在中型船舶上的应用[J]. 船舶工程, 2010, 32(4):45-48.
[27]郑荣才, 杨功流, 李滋刚, 等. 综合船桥系统综述[J]. 中国惯性技术学报, 2009, 17(6):661-665.
[28]王帅, 王胜利, 刘涛, 崔东旭. 综合船桥系统跨代研究[J]. 中国水运, 2013, 13(12): 100-101.
[29]Kearon J. Computer Programs for Collision Avoidance and Traffic Keeping[C]. London: Proceedings of Conference on Mathematical Aspects on Marine Traffic, 1977.
[30]Imazu H, Koyama T. Determination of Times of Collision Avoidance[J]. The Journal of Japan Institute of Navigation, 1984, 70:30-37.
[31]今津华马. 评价碰撞危险度的方法[J]. 航海(Japan), 1984, 80:55-62.
[32]Inaish M. Basic Research on a Collision Avoidance System Using Neural Networks[C]. Proceedings of IAIN, 1991.
[33]施平安, 陈文伟, 王敬全, 等. 基于神经网络的复合避碰专家系统研究[J]. 航海技术, 2001(6): 2-5.
[34]孙凯, 方祥麟. 多船避碰神经网络和模糊数学综合决策方法的研究[C]. 中日航海学术交流会论文集, 1996.
[35]Iwasaki H, Hara K. A Fuzzy Reasoning Model to Decide the Collision Avoidance Action[J]. The Journal of Japan Institute of Navigation, 1986, 75: 69-70.
[36]刘宇宏, 陈洪波, 郝燕玲. 一种基于模糊原理的碰撞危险度模型[J].中国航海, 1998(2): 23-29.
[37]赵劲松. 使用可拓集合论确定海上船舶碰撞危险度的模型[C].中日航海学术论文集, 1989.
[38]王敬全, 吴唏. 船舶避碰专家系统[C]. 中日航海学术论文集, 1998.
[39]Coenen F P, Sneaton G P, Bole G G. Knowledge-Based Collision Avoidance[J]. The Journal of Navigation, 1980, 42(1):107-116.
[40]藤井弥平. 海上交通工程学[M]. 东京, 海文堂, 1981.
[41]Goodwin E. M. A Statistical Study of Ship Domain[J]. The Journal of Navigation, 1975, 28(3): 328-344.
[42]Davis P. V., Dove M. J., Stoekel C. T.. A Computer Simulation of Marine Traffic Using Domains and Arenas[J]. Journal of Navigation,1980, 33:215-222.
[43]Davis P. V., Dove M. J., Stoekel C. T.. A Computer Simulation of Multi-ship Encounters[J].Journal of Navigation,1982, 35:347-352.
[44]Pietrzykowski Z., Uriasz J.. The Ship Domain—A Criterion of Navigational Safety Assessment in an Open Sea Area[J].Journal of Navigation, 2009, 62:93-108.
[45]Pietrzykowski Z.Ship's Fuzzy Domain—A Criterion for Navigational Safety in Narrow Fairways[J]. Journal of Navigation, 2008, 61:499-514.
[46]Smierzchalski R. , Michalewicz Z.. Modelling of a Ship Trajectory in Collision Situations at Sea by Evolutionary Algorithm[J].IEEE Transaction on Evolutionary Computation, 2000, 4(3):227-241.
[47]Kijima K., Furukawa Y. Design of Automatic Collision Avoidance System Using Fuzzy Inference[C]. Proceedings of IFAC Conference on Control Applications in Marine Systems, Glasgow, 2001.
[48]李瀛, 张玮. 基于停船视距的船舶领域模型研究[J]. 水运工程, 2014(1):36-40.
[49]陈厚忠, 郭国平. 内河并列桥梁桥区水域船舶领域模型与通过能力研究[J].船海工程, 2008, 37(5):113-116.
[50]鹤田三郎.船舶航行专家系统的基础研究一避碰专家系统[J]. 国外航海科技. 1988(5): 55-58.
[51]王敬全. 船舶避碰专家系统[M]. 广州:海军广州舰艇学院, 1994.
[52]李丽娜, 邵哲平. 船舶拟人智能避碰决策理论介绍[J]. 中国海事, 2011(7):24-27.
[53]李丽娜, 杨神化, 熊振南, 等. 船舶拟人智能避碰决策理论框架的研究[J]. 中国航海, 2009, 32(2):30-34.
[54]李丽娜, 陈国权, 邵哲平, 等. 船舶拟人智能避碰决策方法及其评价标准的构建[J]. 大连海事大学学报, 2011, 37(4):1-5.
[55]杨神化, 施朝健, 李丽娜, 等. 基于 MAS 和航海模拟器技术构建船舶自动避碰仿真平台[J]. 系统仿真学报, 2006, 18(2):686-690.
[56]杨神化, 施朝健, 浏宇宏, 等. Multi-Agent理论和技术在自动避碰决策系统中的应用研究[J]. 上海海事大学学报, 2007, 28(1):121-125.
[57]杨神化, 施朝健, 关克平, 等. 基于Multi-Agent系统和SHS智能港口交通流模拟系统的开发与应用[J]. 系统仿真学报, 2007, 19(2):289-292.
[58]Ahna J H, Rheeb K R, You Y J. A Study on the Collision Avoidance of a Ship Using Neural Networks and Fuzzy Logic[J]. Applied Ocean Research, 2012, 37:162-173.
[59]Bukhari A C, Tusseyeva I, lee B G,etal. An Intelligent Real-Time Multi-Vessel Collision Risk Assessment System from VTS View Point Based on Fuzzy Inference System[J]. Expert Systems with Applications, 2013, 40:1220-1230.
[60]Wasif N, George W. I, Aolei Y. COLREGs-Based Collision Avoidance Strategies for Unmanned Surface Vehicles[J]. Mechatronics, 2012, 22:669-678.
[61]Benjamin M. R, Curcio J.A. COLREGs-Based Navigation of Autonomous Marine Vehicles[C]. Proceedings of IEEE/OES autonomous underwater vehicles, 2004.
收稿日期:2014-10-27
基金项目:辽宁省自然科学基金(2014025009);中央高校基本科研业务费专项资金(3132014321);辽宁省教育厅一般项目(L2013197)
作者简介:江立军(1960—),男,辽宁朝阳人,教授,高级工程师,主要研究方向为舰船系统设计与监造。
文章编号:1674-5949(2015)01-007-06
中图分类号:TP273;U675.96
文献标志码:A
A Review of Ship Collision Avoidance Systems
JiangLijun1,2,ZhengKai2,WangGuofeng2,ZhaoYongsheng2
(1. Office of Navy Military Representatives in Dalian, Dalian 116002, China;
2. Information Science and Technology College, Dalian Maritime University, Dalian 116026, China)
Abstract:With the development of waterway transportation, the navigation safety of ships is becoming an increasingly prominent issue. Ship collision avoidance systems, which help the deck officers to avoid collision, play an the important role in ensuring the safety of ships. The development of the collision avoidance system also reflects the advances of the modern technologies. This paper reviews the modern researches on the ship collision avoidance system and its subsystems, and introduces problems which remain unsolved. The intellectualization, standardization and high integration of the system are proposed as three new directions of the modern ship collision avoidance system.
Key words:ships; collision avoidance systems; navigation systems; information fusion
郑凯(1981—),男,湖北宜昌人,副教授,主要从事非线性控制理论、船舶自动控制等研究。
