基于一、二阶嵌入灵敏度分析的车辆传动系统振动响应预测
2016-01-06黄毅,刘辉,项昌乐
第一作者黄毅男,博士生,1982年1月生
通信作者刘辉女,教授,博士生导师,1975年生
基于一、二阶嵌入灵敏度分析的车辆传动系统振动响应预测
黄毅1,刘辉1,2,项昌乐1,2
(1. 北京理工大学机械与车辆学院,北京100081; 2. 特种车辆研究所,北京100081)
摘要:由于汽车等行业新产品设计及零部件装配时,其原型样机在质量、阻尼、刚度等组件发生变化时常出现振动、噪声问题,需对修改后系统的振动进行预测。嵌入灵敏度函数在减小线性振动实现最优设计方面的作用已得到证实,在非线性系统中借助基于统计方法对响应特性进行评价并用于灵敏度中。采用一阶和二阶多步迭代两种灵敏度技术对车辆传动系统非线性模型振动响应的统计特性进行预测。结果表明,两种方法的预测精度在单自由度模型及车辆传动系统模型中获得验证。该方法为在系统设计参数局部摄动获得最优响应提供理论基础。
关键词:嵌入灵敏度;振动响应预测;非线性系统;车辆传动
收稿日期:2014-01-12修改稿收到日期:2014-11-26
中图分类号:U461.1文献标志码:A
基金项目:国家自然科学基金 (51275261);国家科技重大专项 (ZX069)
Vibration response prediction for a vehicle transmission system using first-order and second-order iterative embedded sensitivity analysis
HUANGYi1,LIUHui1,2,XIANGChang-le1,2(1. School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081,China;2. Vehicle Research Center, Beijing 100081,China)
Abstract:In product manufacturing and test environments, engineers must predict how mechanical components vibrate after their mass, damping, and stiffness are modified. It makes predicting the changes in vibration response of the modified system relative to that of the original system be very important. Embedded sensitivity functions have been proved to have a good performance to realize optimal design modifications for reducing linear vibrations in certain frequency ranges. And it’s also a good way to evaluate the vibration characteristics of a nonlinear system based on the statistical method. Here, two techniques to predict the forced response of mechanical components for local changes in properties were presented based on a first-order multi-step iterative prediction and a second-order iterative embedded sensitivity analysis. The two methods were applied in a single DOF model to determine the accuracy of the predictions. They were also applied in a vehicle transmission system model. The study results provided a guidance for NVH engineers acquiring local optimal vibration response characteristics according to the proposed technique.
Key words:embedded sensitivity analysis; predicting response changes; nonlinear systems; vehicle transmission
将产品的开发设计周期最短化在企业推出新产品过程中极其重要。对汽车产业设计原型样机及零部件装配后出现的振动、噪声问题,只能通过设计迭代解决,但因时间及设计修改权限有限,在产品尺寸、质量、费用等能做的改动并不大。因此若有能预测产品在某些设计参数变化后动力学行为变化技术尤其重要,对找出局部范围内最优参数设计有明显帮助,此为结构动力学修改[1]。其含两方面:一为逆问题,即在已知修改前动力学行为并预定修改后动力学行为条件下用约束最优化设计方法等确定结构修改型式,称为结构动力学修改重设计问题。其获得唯一解的可能性极小且求解复杂、困难;二为正问题[2-3],即在给定结构修改型式及修改前的结构动力学特性条件下用高效重分析方法确定修改后结构动力学特性,称为结构动力学重分析问题。
预测系统动力学响应研究主要有有限元/边界元法、试验模态分析法、灵敏度分析方法及简单系统解析方法等四种。其中解析法仅适用于极简单系统,对实际系统不太适用。
对试验模态法,如Elliot等[4-5]研究模态截断在结构及模态修改中的影响。Sestieri[6]进一步从理论上分析因模态截断造成修改后系统动力学特性预测的不准确性,认为因不能获得完备模态造成模态截断对修改后系统模态模型不能完全解耦所致影响不可忽略,通过频率响应函数(FRF)数据取代模态数据能较好避开该问题,并提出减少矩阵求逆次数算法。Park等[7-8]推导的适用大修改模态参数变化,使修改后结构FRF矩阵在连接点通过力平衡与几何相容性条件耦合获得更精确的模态参数。Özgüven[9-10]的基于FRF方法在局部修改计算中可避免矩阵求逆或将矩阵阶次降到最低。Yang等[11]分别比较研究修改后FRF用一、二阶迭代嵌入灵敏度函数进行泰勒展开时的精度与计算量,并用于悬臂梁、汽车子系统等。对车辆传动系统分析,刘辉等[12]基于固有特性灵敏度分析,研究惯量、刚度修改后动力学特性预测的精度问题。
随振动问题研究逐渐深入,进行传统线性模型下模态及频响函数预测已不能满足产品设计需要,故需建立接近实际的非线性模型,进行振动响应预测并反哺产品参数设计。本文由单自由度线性振动模型入手,分析基于一、二阶泰勒级数展开的振动响应预测精度,并在已知参数附近给出振动最小的对应参数取值;将该方法用于车辆传动非线性动力学模型对精度问题进行研究;针对非线性系统时域响应曲线的不规则性特点,提出将振动响应均方根(RMS)值作为振动强度的评价标准,找出给定设计参数摄动时最小振动响应均方根对应的设计参数。并对产品设计提出减振建议。
1嵌入灵敏度理论及预测振动位移在单自由度系统中的应用
嵌入灵敏度方程阐明系统振动响应关于集中质量、刚度及阻尼等参数摄动的变化情况。
1.1基于一阶泰勒展开的振动响应预测
泰勒级数展开可在无需重新建模、计算情况下预测系统在某些参数发生变化后的振动响应。系统参数包括质量、刚度及阻尼等,一阶近似计算式为
(1)
式中:X为系统响应矢量;a为变化参数;Δa为参数变化量。
式(1)表明系统参数a修改前后振动响应的线性变化关系。若参数变化量Δa较大,往往采用多步法进行预测,将Δa变化分成N步完成。系统参数变化较大时,也能获得精度较高的预测结果。一阶泰勒技术展开式为

(2)
式中: ∂Xj/∂a为在j点导数,表示每一步灵敏度需实时更新。
在满足精度条件下常用原系统导数∂X0/∂a计算,式(2)变为

(3)
1.2基于二阶泰勒展开的振动响应预测
当预测的系统结构较复杂时精度往往达不到要求,采用多步法需较大提高计算步数N才能满足。提高预测精度途径除采用更多步数即更小步长外,亦可通过提高泰勒展开阶数完成。而每步灵敏度信息不更新会对提高预测精度更有效,可极大减少计算步数。对二阶泰勒展开进行预测的单步表达式为
(4)

(5)
式(5)为采用多步法的计算式。由式(4)、(5)看出,一阶泰勒展开需用二阶导数信息,会增加工作量,但对提高精度及找出系统参数变化时局部最优振动响应中作用完全值得。
1.3单自由度系统基于一二阶泰勒展开振动响应预测
据式(3)、式(5)对单自由度系统刚度变化后振动响应进行预测,步数N=10,见图1。该系统动力学方程及对K的一二阶灵敏度方程为
(5)
式中:M= 1 kg;K= 5 000 N/m;C=10 Ns/m;激励f(t)=Acos(ωt)。
求解上式将所得位移/速度响应及其对K的一二阶导数代入式(3)、(5)可求出修改后系统的振动响应。其动力学方程及一、二阶灵敏度方程可通过Matlab采用定步长的四阶Runge-Kutta编程求解。

图1 单自由度线性系统 Fig.1 Single DOF linear system
由于系统工作环境常为确定的,不改变外部激励f(t)任何参数,仅改变系统本身固有的M、K、C等,如将刚度修改为K1= 7 000 N/m。系统修改前后质量块位移x(t)的变化见图2。由图2(a)看出,增加刚度K后质量块振幅减小。由局部放大图2(b)看出,在振动幅值上采用二阶灵敏度近似结果较一阶更接近修改后重算的响应结果。因此可认为取相同步数情况下二阶灵敏度预测结果更好。而在简谐波形相位上,无论一阶或二阶结果较重新计算结果均存在相位差,不能对修改后系统在相位上进行准确预测。对系统进行振动响应预测时更关注振动幅值及能量等信息,故需确定评价系统位移及速度响应物理量。本文采用系统位移、速度响应的RMS值作为评价标准,计算式为
(7)
(8)
式(7)为有解析表达式响应结果的计算公式,式(8)为离散或用数值方法计算的响应结果计算公式。据图2(a)波形截取的稳态响应部分,用式(8)计算刚度K分别为4 000 N/m、5 500 N/m及6 000 N/m时,系统重新计算及一二阶预测响应结果的RMS值见表1,可见误差不超过5%。因此可认为刚度在4 000~6 000 N/m之间变化时预测结果准确。

表1 不同刚度下各阶响应预测RMS值
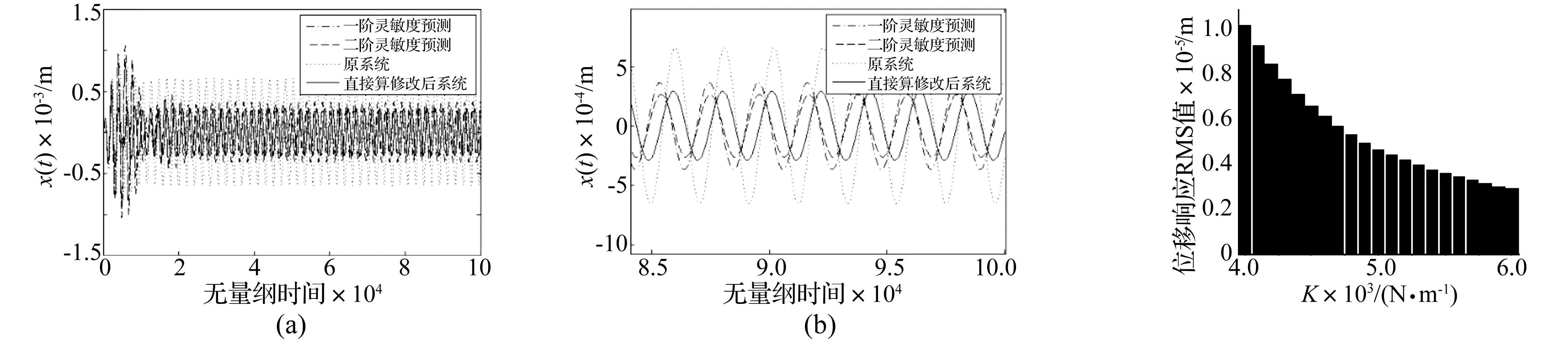

图2 单自由度系统响应比较Fig.2ThecomparisonofresponsecurveofsingleDOFlinearsystem图3 刚度K从4000~6000N/m时预测响应RMS值Fig.3TheRMSvalueofpredictingresponsewhenstiffnessKchangingfrom4000to6000N/m
采用上述方法对刚度4 000~6 000 N/m的变化进行预测,每组值间隔100 N/m共计21组。计算结果见图3。由图3看出,刚度K在该区间的变化中位移响应RMS值单调递减,符合线性振动特性。因此,若初设刚度K=5 000 N/m且修改量正负不超1 000 N/m,选6 000 N/m时的位移响应RMS值最小。即在线性系统等幅值振动下K为6 000 N/m时振动位移幅值最小。
2数值算例
2.1响应预测模型及流程
将上述方法用于图4的实际车辆传动系统,以期设计出车辆传动系统原始样机后通过局部结构参数修改使振动尽可能小达到减振目的,为车辆传动系统设计提供参考。对该样机线性模型、非线性模型的动力学方程及灵敏度方程阐述见文献[13-14],此处不再赘述。
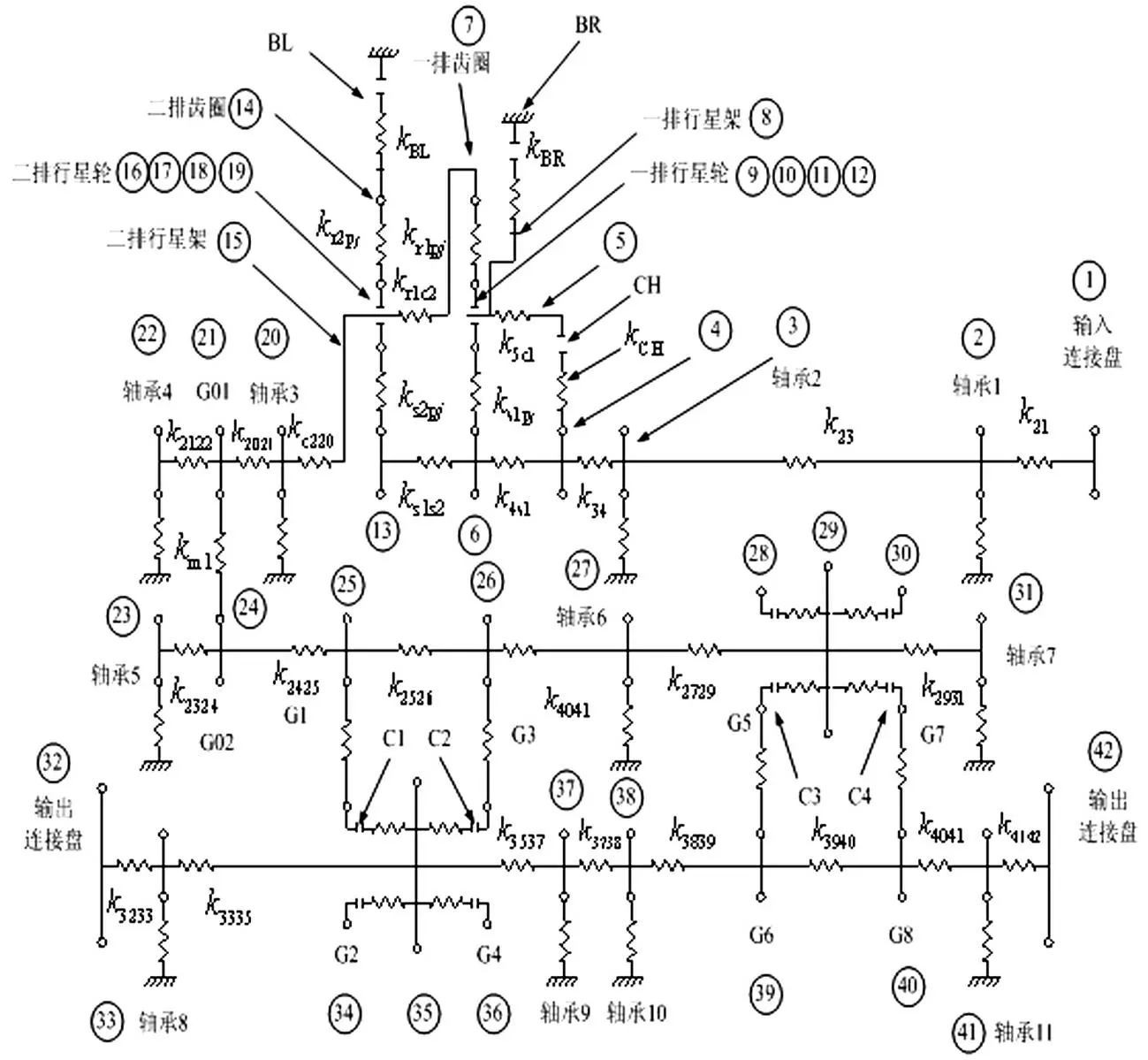
图4 某车辆传动系统样机 平移扭转耦合振动模型 Fig.4 Dynamic model of lateral-torsional coupling system
对某车辆传动样机(图4)在质量点1处加入4 200 r/min转矩发动机激励,并在质量点32、42处加入匹配传动比负载,见图5。该样机包括1个输入惯量盘、2个输出惯量盘、11个轴承、7个离合器、4对定轴齿轮副及2个简单行星排共42个质量点,每个质量点包括x、y、θ三向自由度计126自由度。工况为离合器BL与C4结合,其它离合器分离。行星部分传动简图见图6,离合器BL结合,BR分离时一排空转二排齿圈制动太阳轮输入行星架输出。

图5 发动机输入转矩 Fig.5 The input torque of engine
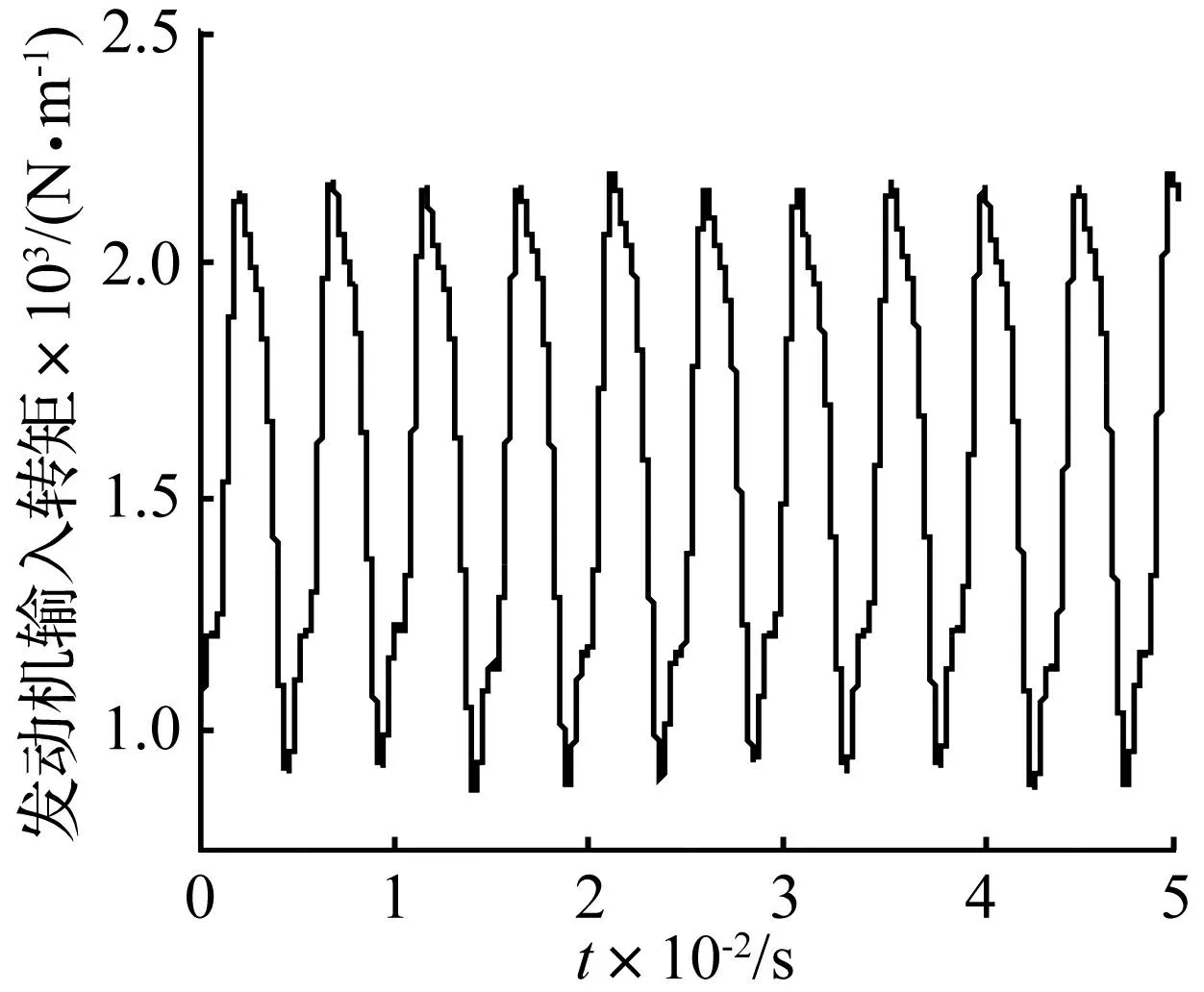
图6 行星部分传动简图 Fig.6 Kinematic sketch of planetary gear
求解样机在上述工况下的非线性动力学方程,确定振动最大轴段。取常用工作转速求解,利用动力学方程建立一阶灵敏度方程,由于动力学方程的响应结果作为一阶灵敏度方程的激励存在,因此用动力学方程响应结果,要求用数值法求解动力学方程及灵敏度方程时用定步长方法以便两种方程的解为同一时刻。据一阶灵敏度结果可确定某转速下对振动最大轴段影响最大参数,该参数可为扭转刚度、惯量等。据一阶灵敏度方程亦可推出二阶灵敏度方程,据二阶灵敏度方程及一阶灵敏度结果可计算二阶灵敏度结果,计算高阶灵敏度方法类推。利用计算的振动最大轴段、最敏感参数、响应及一、二阶灵敏度结果可由式(3)或式(5)预测最敏感参数小范围摄动时动力学响应。由于非线性系统响应曲线不规则性,利用式(8)计算响应RMS值作为预测正确与否及精度标准。据满足精度范围的计算结果确定系统在某参数局部摄动时最小振动结果及对应参数值。整个流程见图7。
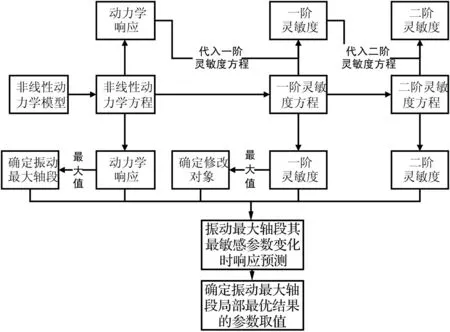
图7 参数摄动下振动最大轴段最优响应预测流程 Fig.7 The predicting procedure flow chart of optimal response in the largest additional torque shaft segment in parametersperturbation
2.2研究对象及最敏感参数确定

图8 输入4 200 r/min时系统各轴段附加扭矩波动RMS值 Fig.8 The RMS value of additional torque of segments in system in 4 200 rpm input speed
上述工况下各轴段附加扭矩RMS值见图8。据图4、图5各齿轮与离合器连接关系及表2各齿轮齿数知,在质量点1输入动力并通过两行星排后降速升矩,据齿轮副G0102及G7G8齿数可知转矩有所减小。因此,扭矩RMS值最大应出现于一轴上二排之后,且二轴传动路线上扭矩较大。扭矩较大轴段的附加扭矩亦大。计算结果(图8)已得以印证,附加扭矩最大出现在轴段20-21之间。因此选该轴段为研究对象。

表2 各齿轮齿数

图9 轴段20-21附加扭矩对各扭转刚度相对灵敏度 Fig.9 The relative sensitivity of additional torque of the 20-21 shaft segment with respect to shaft torsional stiffnesses

图10 轴段20-21附加扭矩对各惯量相对灵敏度 Fig.10 The relative sensitivity of additional torque of the 20-21 shaft segment with respect to inertia of mass points
摄动参数通过一阶灵敏度计算结果选取。轴段20-21在输入转速4 200 r/min时对各轴段扭转刚度及各点惯量灵敏度结果见图9、图10。据图9计算结果选轴段25-26间扭转刚度kt25-26摄动进行动力学行为预测;据图10计算结果选图4质量点29的惯量J29摄动进行动力学行为预测。
2.3对扭转刚度摄动的振动响应预测
轴段20-21间附加扭矩计算式、修改后轴段附加扭矩计算式及对扭转刚度kt25-26的一、二阶灵敏度计算式分别为
(9)
(10)
(11)
(12)
用式(1)对轴段20-21间附加扭矩进行一阶泰勒展开时,据式(9)~式(11)修改后的附加扭矩、用式(4)二阶泰勒展开式分析及式(12)修改后附加扭矩分别表示为

(13)
(14)
式(13)、(14)对应的多步法计算式分别为
(15)
(16)
将kt25-26修改为原来的1.1倍后采用多步法公式预测结果见图11,步数N=20。由图11看出,一、二阶预测结果与重新计算值均较接近,因此认为该结果满足精度要求。
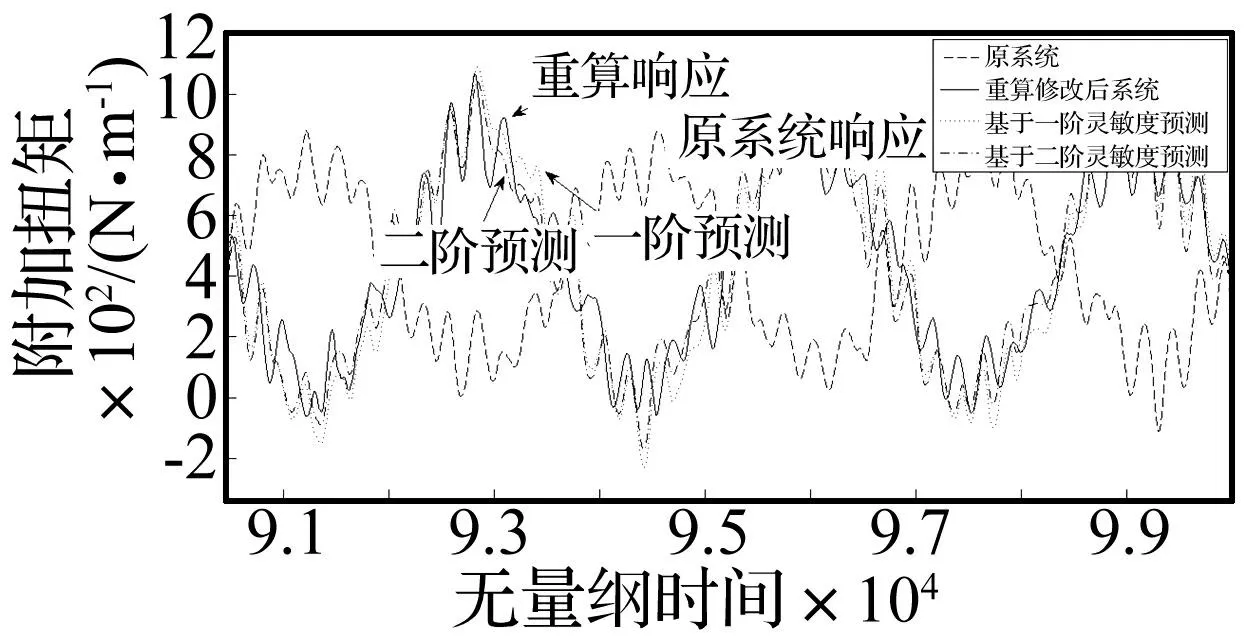
图11 轴段20-21附加扭矩在 k t25-26修改前后比较图 Fig.11 The comparison of additional torque curve of the 20-21 shaft segment before and after k t25-26 being modified
用式(8)分别计算原系统、kt25-26修改后系统及分别用一、二阶灵敏度预测的轴段20-21间附加扭矩,结果见表3。

表3 不同扭转刚度k t25-26下轴段20-21间附加扭矩RMS值
用以上方法对kt25-26分别从0.9倍修改到1.1倍每0.01倍进行一次预测,共21组预测结果见图12。由图12看出,轴段20-21间附加扭矩随扭转刚度kt25-26变化并未单调变化而在1.09倍附近取得局部最小值,且由于该结果RMS值具有统计特性,因而避免瞬时冲击造成结果的不准确性。

图12 刚度k t25-26变化时轴段20-21间 附加扭矩RMS值 Fig.12 RMS value of additional torque of the 20-21 shaft segment in perturbation of k t25-26
2.4对质量点惯量摄动的振动响应预测
轴段20-21间附加扭矩对质量点29的惯量J29一、二阶灵敏度计算式分别为
(17)
(18)
用式(1)对轴段20-21间附加扭矩进行一阶泰勒展开时修改后附加扭矩及用式(4)二阶泰勒展开式分析时修改后附加扭矩计算式以及对应的多步法计算式分别为
(19)
(20)
(21)
(22)
将J29修改为原来的1.1倍后采用多步法公式预测结果见图13,其中步数N=20。由图13看出,一、二阶灵敏度预测结果较接近,曲线位于原系统响应与重算系统响应之间。说明该预测对修改后系统的时域曲线近似较好。利用式(8)分别计算原系统、J29修改后系统及分别用一、二阶灵敏度预测的轴段20-21间附加扭矩,结果见表4。由表4看出,用二阶方法预测时误差不超正负10%;而由图13时域曲线知,预测曲线波形与重新计算结果吻合较好,因此可认为预测精度满足要求,可用于寻找参数局部摄动时的最优响应。

图13 轴段20-21附加扭矩在 J 29处修改前后比较 Fig.13 The comparison of additional torque curve of the 20-21 shaft segment before and after J 29being modified
对J29分别从0.9倍修改到1.1倍每0.01倍进行一次预测,共21组预测结果,见图14。图14(b)为重新计算后轴段20-21间附加扭矩RMS值,图14(a)为预测轴段20-21间附加扭矩RMS值。据表4,若参数在修改值一侧误差全为负、另侧全为正,且误差与实际响应RMS值波动在同数量级时会造成类似单调结果。由于预测误差在参数同侧不会同时出现不同正负号,且邻近几组结果间误差变化不太大,因此可从几组预测结果中选择最小值,即为小范围内的极小值。如图14(a)中局部小值在0.9倍、0.94倍、0.97倍、0.99倍、1.01倍、1.06倍、1.07倍对应重算结果亦为局部最小值,且最小值之间差距不大。
由于非线性存在,参数变化时实际响应结果不会成类似等差分布。所用预测方法其误差波动范围与实际结果波动范围在同数量级时,若原始数值两侧预测误差为不同正负号时,往往不能获得准确的局部最小值。局部小范围极小值对应真实局部极小值,但误差满足一定精度范围时实际极小值相差不会太大,因此在振动方面的建议虽不完全准确,却能获得相对原响应更小的响应结果。

表4 不同惯量J 29下轴段20-21间附加扭矩RMS值
3结论
本文针对车辆传动系统非线性模型及基于动力学响应的一、二阶灵敏度分析,采用多步法对系统扭转刚度、惯量等参数改变后的动力学响应进行预测。据计算结果,结论如下:
(1)该方法能将二阶预测误差控制在10%以内,能较准确的对修改后系统动力学响应进行预测。
(2)对线性系统或参数摄动两侧误差同号的非线性系统,采用该预测能较准确找到局部最优响应。
(3)对参数摄动两侧误差异号的非线性系统预测结果往往呈类似单调趋势,不能准确预测局部最优响应;而相邻预测结果间误差不大,可获得小范围最优响应。
(4)该方法对非线性系统动力学预测较准确,能在一定程度上为减振提供参考。
参考文献
[1]吕振华. 结构动力学修改重分析方法的发展[J]. 计算结构力学及其应用, 1994, 11(1):85-91.
LÜ Zhen-hua. Development of reanalysis methods for structural dynamics modifications[J]. Computational Structural Mechanics and Applications, 1994, 11(1):85-91.
[2]Aryana F, Bahai H. Sensitivity analysis and modification of structural dynamic characteristics using second order approximation[J]. Engineering Structures,2003,25:1279-1287.
[3]Bahai H, Aryana F. Design optimisation of structures vibration behaviour using first order approximation and local modification[J]. Computers and Structures, 2002, 80:1955-1964.
[4]Elliot K B, Mitchell L D. The effect of modal truncation on modal modification[C]. Proc. 5th Int. Modal Anal. Conf., 1987:72-78.
[5]Braun S, Ram Y M. On structural modifications in truncated systems[C]. Proc. 5th Int. Modal Anal. Conf., 1987:1550-1556.
[6]Sestieri A. Structural dynamic modification[J]. Sādhanā, 2000, 25(3):247-259.
[7]Park Y H, Park Y S. Structure optimization to enhance its natural frequencies based on measured frequency response functions[J]. Journal of Sound and Vibration, 2000, 229:1235-1255.
[8]Park Y H, Park Y S. Structural modification based on measured frequency response functions: an exact eigenproperties reallocation[J]. Journal of Sound and Vibration, 2000, 237:411-426.
[9]Özgüven H N. A new method for harmonic response of non-proportionally damped structures using undamped modal data[J]. Journal of Sound and Vibration, 1987, 117:313-328.
[10]Özgüven H N. Structural modifications using frequency response functions[J]. Mechanical Systems and Signal Processing, 1990, 4(1):53-63.
[11]Yang C, Adams D E. Predicting changes in vibration behavior using first-and second-order iterative embedded sensitivity functions[J]. Journal of Sound and Vibration, 2009, 323:173-193.
[12]刘辉, 项昌乐, 郑慕桥. 车辆动力传动系固有特性灵敏度分析及动力学修改[J]. 汽车工程, 2003, 25(6):591-594.
LIU Hui, XIANG Chang-le, ZHENG Mu-qiao. Sensitivity analysis and dynamic modification of natural characteristic in vehicle powertrain[J]. Automotive Engineering, 2003, 25(6): 591-594.
[13]黄毅,刘辉,陈胤奇,等. 车辆传动系统线性弯扭耦合振动响应灵敏度研究[J]. 振动工程学报, 2014, 27(3):333- 340.
HUANG Yi, LIU Hui, CHEN Yin-qi, et al. Response sensitivity of the linear vibration of the gear System of the vehicle transmission[J]. Journal of Vibration Engineering, 2014, 27(3):333-340.
[14]黄毅,刘辉,项昌乐,等. 车辆传动系统非线性平移扭转耦合振动响应灵敏度研究[J]. 振动与冲击,2014,33(23):92-99.
HUANG Yi, LIU Hui, XIANG Chang-le, et al. Response sensitivity of the nonlinear vibration of lateral-torsional coupling model of vehicle transmission[J]. Journal of Vibration and Shock, 2014, 33(23):92-99.

