一种联合多历元观测信息的GPS/BDS组合单点定位方法
2016-01-04潘林,蔡昌盛,戴吾蛟等
引文格式: 潘林,蔡昌盛,戴吾蛟,等. 一种联合多历元观测信息的GPS/BDS组合单点定位方法[J].测绘通报,2015(2):5-9.DOI:10.13474/j.cnki.11-2246.2015.0030
一种联合多历元观测信息的GPS/BDS组合单点定位方法
潘林,蔡昌盛,戴吾蛟,朱建军
(中南大学地球科学与信息物理学院,湖南 长沙 410083)
An Approach Using Multi-epoch Observations of Combined GPS/BeiDou
Single Point Positioning
PAN Lin,CAI Changsheng,DAI Wujiao,ZHU Jianjun
摘要:在GPS/BDS组合单点定位中,定位精度受观测信息量影响很大,但观测时段中不可避免地会有个别历元观测信息过少,导致这些历元的定位精度很差。基于此,本文提出了一种联合多历元观测信息的GPS/BDS组合单点定位方法,以弥补单历元方法中单个历元观测信息量不足的缺点。利用开阔环境和遮挡环境下的观测数据进行分析,结果表明,在GPS单系统、北斗单系统及GPS/BDS组合系统单点定位中,多历元方法的定位精度均优于单历元方法。
关键词:GPS;北斗;单点定位;定位精度;多历元
中图分类号:P228.4文献标识码:B
收稿日期:2013-11-14
基金项目:国家自然科学基金(41004011);湖南省国土资源厅科技项目(2012-41)
作者简介:潘林(1989—),男,硕士生,主要研究方向为北斗数据处理和精密单点定位。E-mail:panlin_1989@163.com
一、引言
北斗区域卫星导航系统(BeiDou navigation satellite system,BDS)于2012年12月27日开始组网运行,面向我国及周边地区提供定位精度10m、测速精度0.2m/s、授时精度10ns的开放服务。BDS由14颗卫星构成,包括5颗地球静止轨道(GEO)卫星、5颗倾斜地球同步轨道(IGSO)卫星和4颗中圆地球轨道(MEO)卫星。预计到2020年左右,建成覆盖全球的导航系统,完整星座由5颗GEO卫星、3颗IGSO卫星和27颗MEO卫星组成(http:∥www.beidou.gov.cn/)。
相比单系统,双系统、多系统组合具有明显的优势,可以大大增加可视卫星数,改善卫星几何结构,提高定位的精度、可靠性和效率[1]。在未来多GNSS系统共存的格局下,进行双系统、多系统组合已成为卫星导航和定位应用发展的一个必然趋势。
在GPS/BDS组合单点定位中,定位精度受观测信息量影响很大,但观测时段中不可避免地会有个别历元观测信息过少,导致这些历元的定位精度很差。基于此,本文提出了一种联合多历元观测信息的GPS/BDS组合单点定位方法,以弥补单历元方法中单个历元观测信息量不足的缺点。笔者利用开阔环境和遮挡环境下的观测数据,对多历元方法的可行性进行了分析,并与单历元方法的结果进行了对比。
二 、GPS/BDS组合单点定位方法
1. GPS/BDS组合单点定位观测模型
对于GPS/BDS单频伪距组合单点定位,其基本观测方程表示如下[2]
(1)
(2)
式中,g和b分别表示一颗GPS卫星和一颗北斗卫星;P是卫星第一个频率上的伪距观测值,单位m;ρ是卫星与接收机之间的几何距离,单位m;c是光速,m/s;dt是接收机钟差,单位s;dtsys是GPS-BDS时间差,单位s;dT是卫星钟差,单位s;dorb是卫星轨道误差,单位m;dtrop是对流层延迟误差,单位m;dion是电离层延迟误差,单位m;ε包含观测噪声与多路径误差,单位m。
在式(1)、式(2)中,对流层延迟误差通过Saastamoinen模型[3]改正,电离层延迟误差通过Klobuchar模型[4]改正,卫星位置和卫星钟差通过广播星历计算得到。北斗的坐标系统为2000国家大地坐标系统(CGCS2000),GPS的坐标系统为WGS-84,但两个坐标系统相差仅在厘米级,而单频伪距单点定位的精度在米级,故在解算过程中无须进行坐标转换[5]。北斗的时间系统为北斗时,GPS的时间系统为GPS时,两时间系统除了有一个14s的偏差外[5],还有一个小于1s且随时间变化的偏差,因此需要估计一个额外的GPS-BDS时间差参数。忽略轨道误差及残留的卫星钟差后,待估参数包括三维位置坐标、接收机钟差及GPS-BDS时间差。
2. 多历元单点定位方法
在单点定位中,定位精度受观测信息量影响很大,但观测时段中不可避免地会有个别历元观测信息过少,导致这些历元的定位精度很差。基于此,考虑联合多个历元的观测信息进行定位,以弥补单历元方法中单个历元观测信息量不足的缺点,这就是多历元单点定位方法的主要思想。
由于本文只是验证,以及和单历元方法相比,多历元方法是否能够有效改善定位精度,因此只处理了静态观测数据。在静态观测中,接收机的位置是不变的,但由于接收机钟漂的存在,每个历元的接收机钟差和GPS-BDS时间差参数是不同的,因此与单历元方法相比,多历元方法中每增加一个历元的观测信息,待估参数就增加一个接收机钟差参数和一个GPS-BDS时间差参数。如果多历元方法中历元的个数为m,则单系统定位的参数个数为3+m,包括3个位置坐标参数和m个接收机钟差参数;双系统定位的参数个数为3+2m,相比单系统增加了m个GPS-BDS时间差参数。需要说明的是,本文使用的是多历元递推的方法,如果多历元方法中历元的个数为m,则从第m个历元开始解算,第m个历元利用1到m历元的观测信息,第m+1个历元利用2到m+1历元的观测信息,依此类推直至最后一个历元。
3. GPS/BDS组合单点定位定权方法
在GPS/BDS组合单点定位中,涉及两个不同卫星系统的观测值,因此需要确定这两个卫星系统观测值的合理权比。目前,主要有两种方法来获得这一权比:一种是先验定权,即得到两卫星系统观测值的先验方差[2];另一种是验后定权,如Helmert方差分量估计[6]。
先验定权方法可以粗略地获得GPS与北斗这两个卫星系统观测值的合理权比,但需要得到两卫星系统观测值的先验方差。但由于受到多种误差的综合影响,先验方差通常不能准确获得。在具体实施的过程中,通常是选择较长时间的观测数据进行测试,不断调整两卫星系统观测值的先验方差,即两卫星系统观测值的权比[2],获得最优定位精度的权比即为两卫星系统观测值的合理权比。
Helmert验后方差分量估计是一种典型的验后定权方法。它的基本思想是首先根据验前估计权进行预平差,用平差后得到的残差信息来估计观测值的方差,根据方差的估计值重新进行定权,以改善初始权值,然后根据重新确定的权值再次进行平差,如此重复进行,直至不同类观测值的权趋于合理,详细处理过程见文献[6]。
三、观测环境与数据采集
为了测试多历元单点定位方法的可行性,特采集了开阔环境和遮挡环境下的观测数据进行分析。开阔环境观测点位于中南大学附近的一栋居民楼楼顶,如图1(a)所示。遮挡环境观测点位于中南大学采矿楼前的一片树林区域中,如图1(b)所示。在开阔环境观测中,卫星信号没有任何遮挡。在遮挡环境观测中,部分卫星信号会被树叶遮挡。
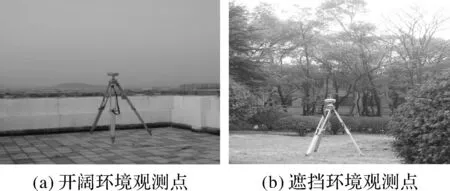
图1 GPS/BDS野外数据采集
采集数据的接收机是由南方测绘公司生产,接收机型号是SOUTH S82-C。该接收机可以输出采样率为1Hz的GPS L1/L2双频数据和北斗B1/B2双频数据。采集数据时截止高度角设为10°,采样间隔设为30s。开阔环境数据在2013年4月10日采集,观测时间段为00:00—23:15(GPS时)。遮挡环境数据在2013年3月25日采集,观测时间段为04:30—09:30。由于导航用户大多使用单频接收机,因此只利用L1/B1上的伪距观测值进行分析。
四、结果与分析
本文选择4种方案用于GPS/北斗组合单点定位:第1种是采用先验定权的单历元定位方法;第2种是采用先验定权的多历元定位方法;第3种是采用验后定权即Helmert方差分量估计的单历元定位方法;第4种是采用验后定权的多历元定位方法。
利用测站所测GPS数据进行精密单点定位[7]获得的位置解作为参考坐标,从而对各方案的定位精度进行评估。
在使用方案1和方案2之前,必须首先通过先验定权方法获得GPS与BeiDou这两个卫星系统观测值的合理权比。选取开阔环境数据进行单历元单点定位分析。图2所示是GPS/BDS组合单点定位取不同权比时三维定位误差的RMS统计值。从图2中可知,当权比为1∶1,即GPS与BeiDou的先验方差相等时,定位精度最高。因此在方案1和方案2中,取两卫星系统观测值的权比为1∶1。
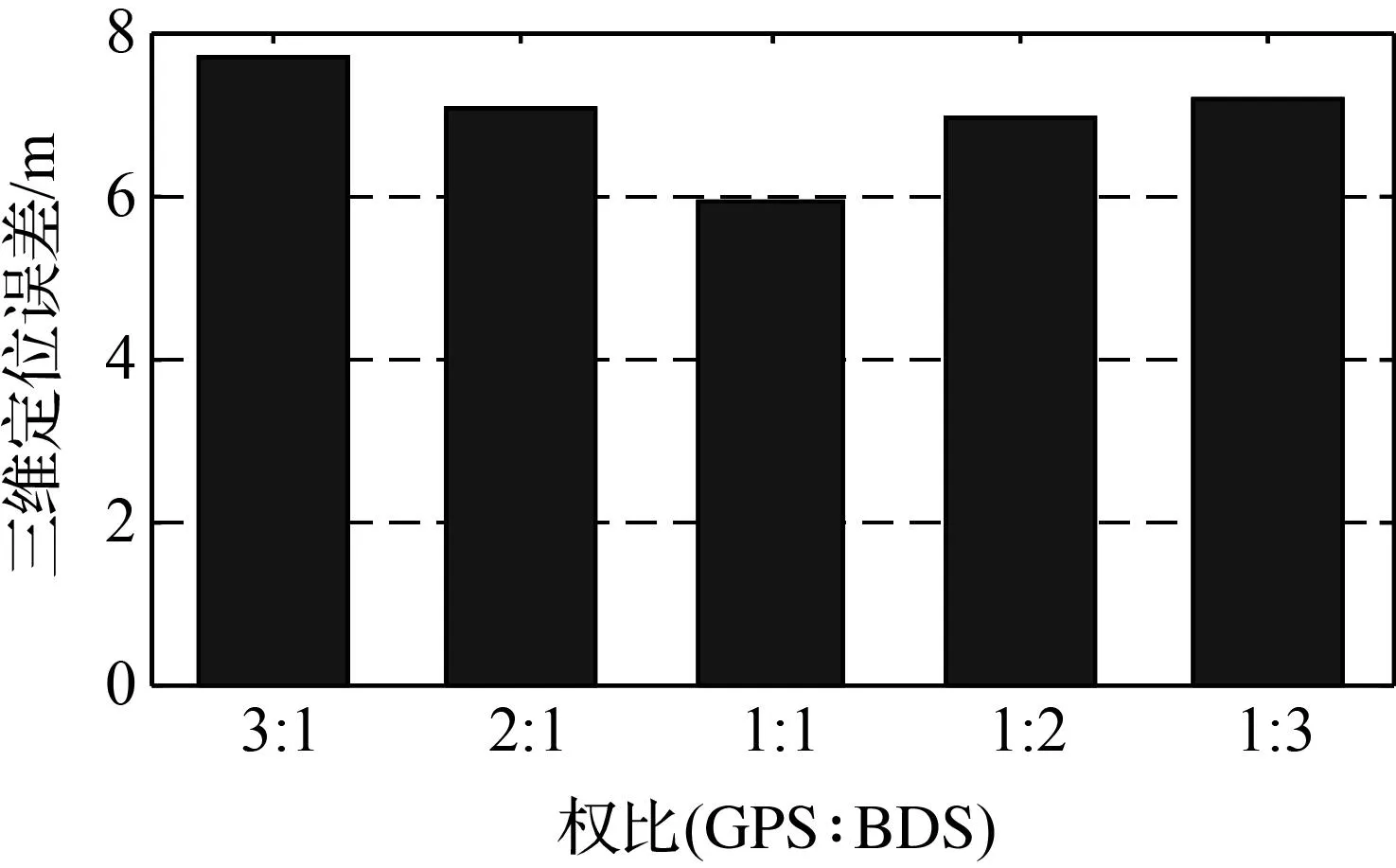
图2 GPS/BDS组合单点定位取不同权比时三维定位误差的RMS统计值
在使用方案2和方案4之前,必须首先确定多历元单点定位方法中取多少个历元的观测信息才是最合理的。表1所示是开阔环境数据采用多历元单点定位方法取不同历元个数时三维定位误差的RMS统计值。从表1中可知,随着历元个数的增多,定位精度不断提高,但历元个数从2变到3时,定位精度改善并不明显,为兼顾算法的计算效率,在方案2和方案4中,多历元单点定位方法的历元个数取2。
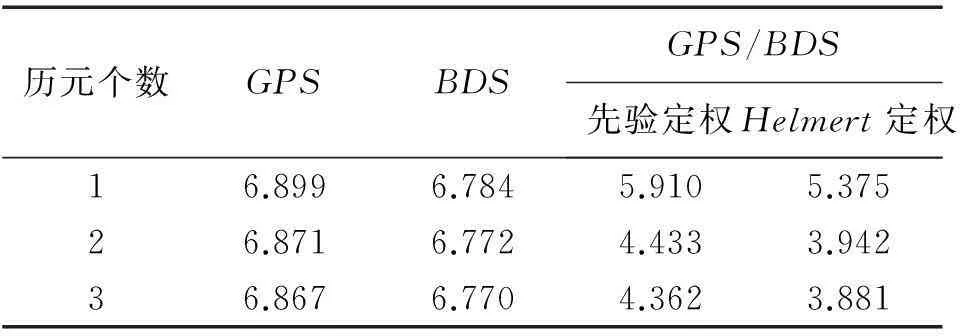
表1 多历元单点定位方法取不同历元个数时三维定位误差的 RMS统计值 m
为了进一步验证所取权比的合理性,特求取了GPS/BDS组合单点定位取不同权比时GPS与BDS卫星伪距观测值的残差。表2所示是GPS与BDS卫星伪距观测值残差的RMS统计值。从表2可知,当权比为1∶1时,GPS与BDS卫星伪距观测值残差最小,因此方案1和方案2中取两卫星系统观测值的权比为1∶1是合理的。从表2中还可知,除权比为3∶1之外,BDS卫星的残差值均小于GPS。图3所示是GPS/BDS组合单点定位取权比为1∶1时各GPS与BDS卫星伪距观测值的残差值。从图3可知,两卫星系统绝大部分历元的残差值在5m以内,并且BDS卫星的残差值较GPS更加稳定,造成这种现象的原因是大部分时间BDS卫星的高度角均较高[4]。
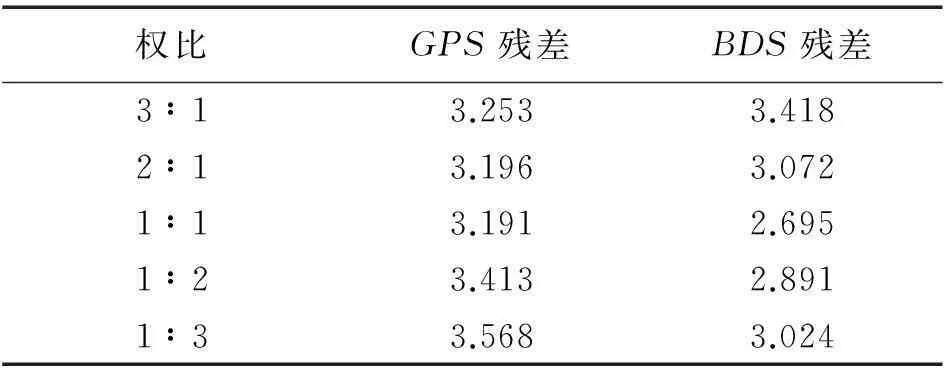
表2 GPS/ BDS组合单点定位取不同权比时 GPS与 BDS卫星伪距观测值残差的 RMS统计值 m

图3 各GPS卫星与北斗卫星伪距观测值残差
为了比较方案1、2和方案3、4所得到的两卫星系统观测值的权比是否一致,使用Helmert方差分量估计方法定权,分别采用单历元方法和多历元方法处理开阔环境数据,求取两卫星系统观测值的收敛权比,结果如图4所示。据统计,单历元方法中,Helmert方差分量估计方法所得权比为0.53~1.98,均值为1.02,STD(standarddeviation)值为0.25;多历元方法中,权比为0.70~1.65,均值为1.00,STD值为0.16。因此,Helmert方差分量估计方法所得权比与先验定权方法是一致的。并且,与单历元方法相比,多历元方法所得权比更加稳定和可靠。
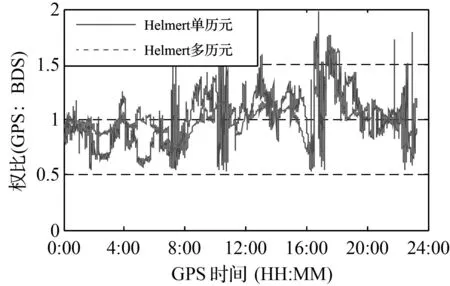
图4 Helmert方差分量估计方法收敛权比
图5是利用开阔环境数据,使用4种方案进行GPS/BDS组合单点定位的结果。图6是相应的可见卫星数与PDOP值。从图5中可知,4种方案在东方向的定位误差相差不大;方案4北方向的定位误差要明显小于其他3种方案;而在高程方向,有诸多时间段,如12:00和16:00附近时间段,多历元方法的定位精度要明显优于单历元方法。从图6中可知,和单历元方法相比,多历元方法的可见卫星数增加了一倍,PDOP值显著减小,这是多历元方法定位精度得到改善的直接原因。
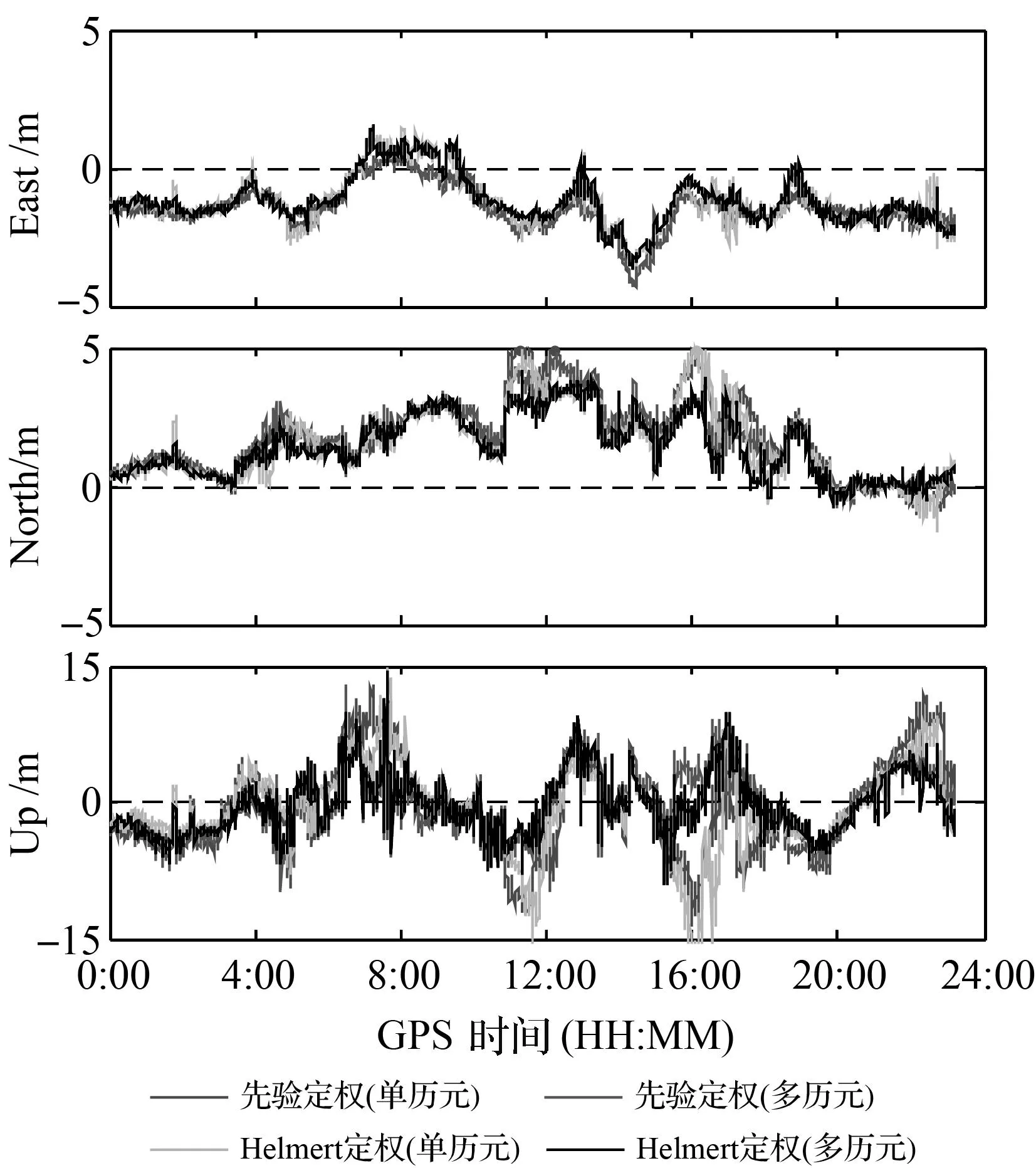
图5 开阔环境数据GPS/BDS组合单点定位结果
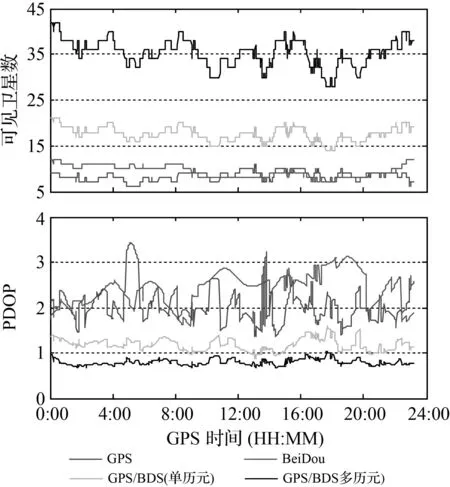
图6 开阔环境数据可见卫星数与PDOP值
为了分析可见条件不好情况下的定位情况,特对遮挡环境数据进行分析。图7是利用遮挡环境数据,使用4种方案进行GPS/BDS组合单点定位的结果。图8是相应的可见卫星数与PDOP值。由图8和图6比较可知,与开阔环境相比,在遮挡环境中,可见卫星数减少,PDOP值增大。由于没有足够多的多余观测,图7中方案3的定位结果最差,出现了严重的发散情况,而方案4中采用多历元方法,则很好地避免了这种情况的发生。因此,在遮挡环境中没有足够多的多余观测时,不建议使用方案3进行GPS/BDS组合单点定位。
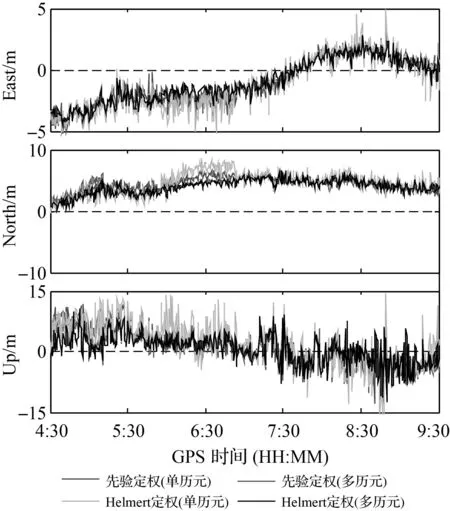
图7 遮挡环境数据GPS/BDS组合单点定位结果
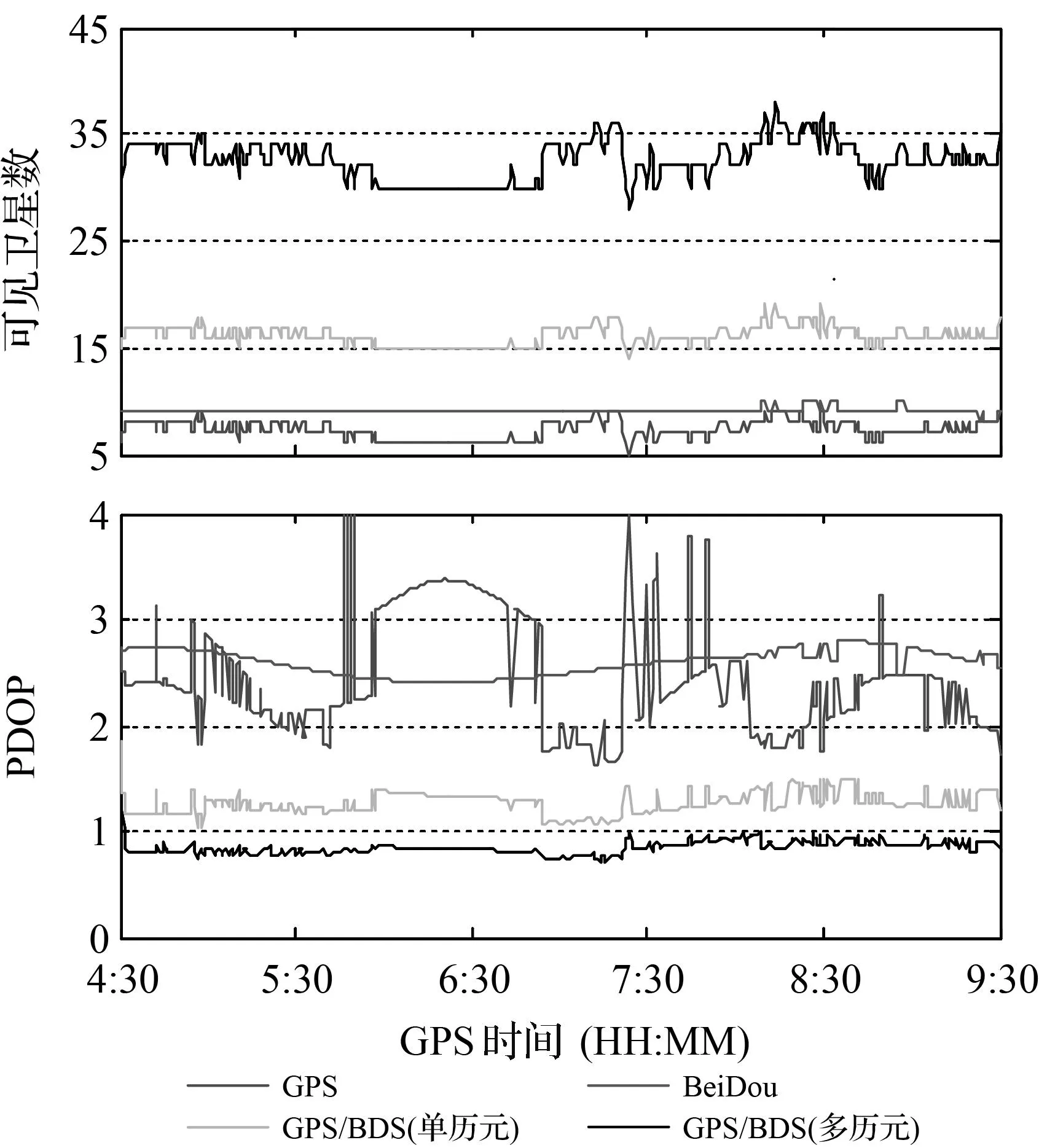
图8 遮挡环境数据可见卫星数与PDOP值
表3、表4是GPS单系统、BDS单系统、GPS/BDS组合系统单点定位误差RMS统计值。从表中可知,BDS单点定位的精度达到甚至超过GPS单点定位的水平;双系统组合单点定位的精度要明显优于单系统。对于单系统单点定位,在开阔环境下,与单历元方法相比,多历元方法的定位精度只有轻微改善;在遮挡环境下,与单历元方法相比,多历元方法的定位精度有显著提高。对于GPS/BDS组合单点定位,无论是开阔环境还是遮挡环境,与单历元方法相比,多历元方法的定位精度均有显著改善,并且精度改善主要体现在高程方向。从表4中可知,在所有的观测时段中,方案4的定位精度最高。
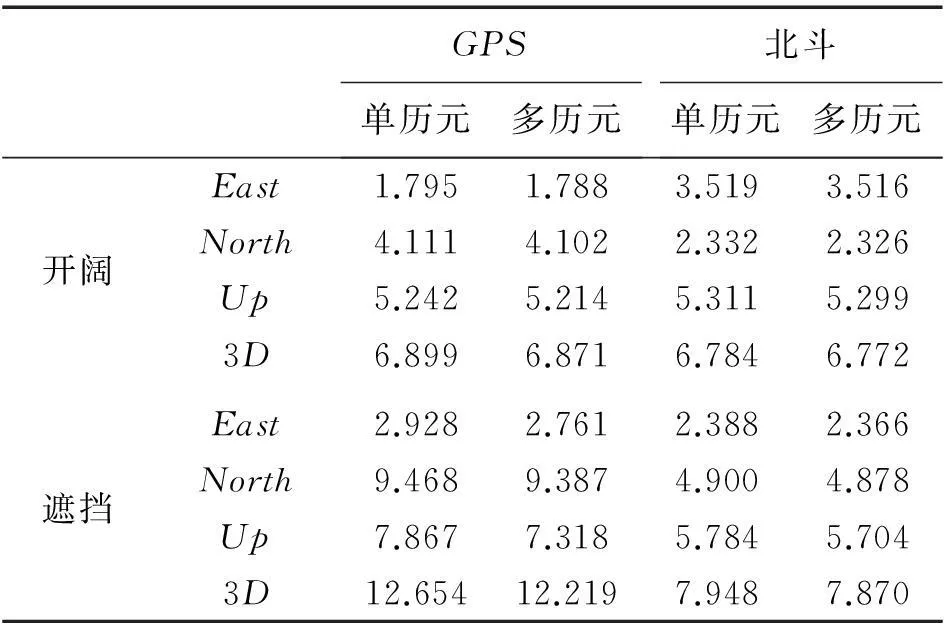
表3 GPS单系统、 BDS单系统单点定位误差 RMS统计值 m
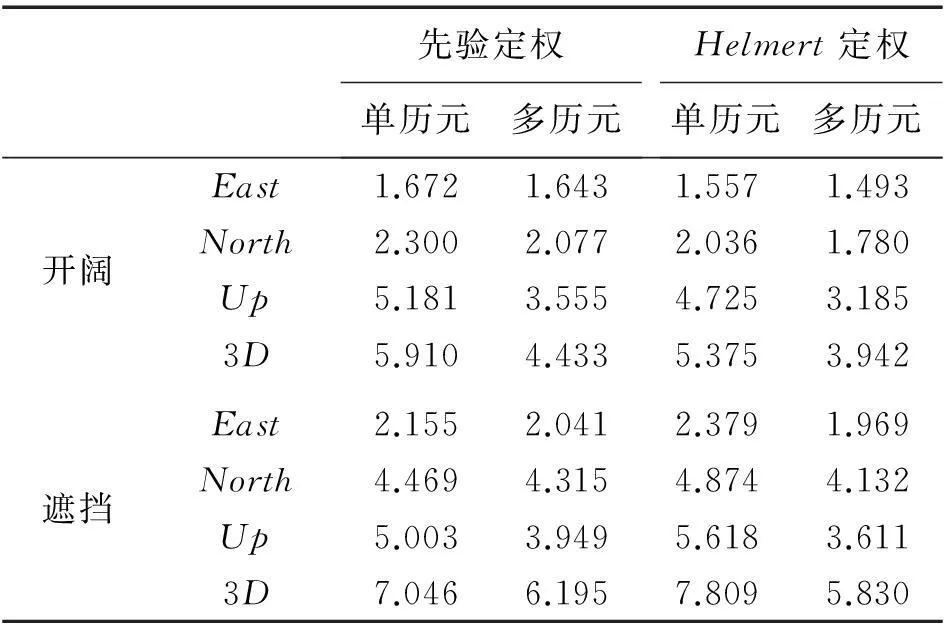
表4 GPS/ BDS组合系统单点定位误差 RMS统计值 m
五、结束语
在GPS/BDS组合单点定位中,定位精度受观测信息量影响很大,尤其是使用Helmert方差分量估计方法定权时,如果没有足够多的多余观测,会出现严重的发散现象。但观测时段中不可避免地会有个别历元观测信息过少,导致这些历元的定位精度很差。基于此,本文提出了一种联合多历元观测信息的GPS/BDS组合单点定位方法,以弥补单历元方法中单个历元观测信息量不足的缺点。利用开阔环境和遮挡环境下的观测数据进行分析,结果表明,在GPS单系统、BDS单系统及GPS/BDS组合系统单点定位中,和单历元方法相比,多历元方法的定位精度均有不同程度的改善。
本文证明了多历元方法在单点定位中的可行性,但只处理了静态观测数据。在动态观测中,由于接收机位置是不断变动的,如果使用多历元方法,单点定位的函数模型需要进一步研究。本文为下一步的研究工作打下了基础,具有重要的指导意义。
参考文献:
[1]CAIC,GAOY.ACombinedGPS/GLONASSNavigationAlgorithmforUsewithLimitedSatelliteVisibility[J].JournalofNavigation, 2009, 62(4): 671-685.
[2]CAIC,GAOY,PANL.AnAnalysisonCombinedGPS/COMPASSDataQualityandItsEffectonSiglePointPositioningAccuracyunderDifferentObservingCondtions[J].AdvancesinSpaceResearch, 2013,DOI: 10.1016/j.asr.2013.02. 019.
[3]SAASTAMOINENJ.ContributiontotheTheoryofAtmosphericRefraction[J].BulletinGéodésique, 1972, 105(1):279-298.
[4]KLOBUCHARJ.IonosphericTime-DelayAlgorithmsforSingle-FrequencyGPSUsers[J].IEEETransactionsonAerospaceandElectronicSystems, 1987,AES-23(3): 325-331.
[5]SHIC,ZHAOQ,HUZ,etal.PreciseRelativePositioningUsingRealTrackingDatafromCOMPASSGEOandIGSOSatellites[J].GPSSolutions, 2012,17(1):103-119.
[6]HELMERTFR.DieAusgleichungsrechnungNachderMethodederKleinstenQuadrate[M].ZweiteAuflage:Teubner,1907.
[7]ZUMBERGEJF,HEFLINMB,JEFFERSONDC,etal.PrecisePointPositioningfortheEfficientandRobustAnalysisofGPSDatafromLargeNetworks[J].JournalofGeophysicalResearch, 1997, 102(B3):5005-5017,DOI: 10.1029/96JB03860.