天文航姿测量系统的方案设计与实现
2015-12-31牛雷
牛雷
(中国人民解放军92941部队,辽宁葫芦岛 125001)
0 引言
天文导航技术是一门既古老又精确的导航方法,起源于航海,发展于航空,辉煌于航天。天文钟和航海六分仪的相继研制成功、天文等高线的发现,使天文导航成为了一种科学的、常用的导航手段。近年来,随着半导体技术的发展,电荷耦合器件和电荷注入器件的成熟应用,星光导航仪、星体跟踪器等高精度天文导航系统使得天文导航技术进入了一个新的发展阶段。同时,天文导航还成为现代组合导航系统中一种主要的定位定向基准,一种主要的辅助导航手段。因此,天文导航在战争条件下将是一种难得的精确导航和综合校准手段。
本文介绍的天文航姿测量系统主要是在已知时间及准确位置信息的情况下,利用惯导平台姿态信息及航向信息,精确地进行姿态解算及航向解算,从而达到对惯导漂移进行校正,提高导航精度的目的。
1 系统的原理、组成及功能
1.1 天文定位原理
天文定位的方法可能有多种,但最基本、最直观的是高度差法。其他的方法必须与高度差的理论相符合,经得起高度差法的检验。
a.高度差法两星定位公式
双天体定位是同时选取两个天体(两天休方位夹角在30°~150°之间),观测两个天体高度h1、h2,获得两条规位线L1、L2,其两条舰位线相交于一点M(真实舰位)。用数学方法计算出舰位修正量Δφ、Δλ,然后与初始舰位C点座标值(φ、λ)相加减得到真实舰位点M。

图1 两星定位原理图
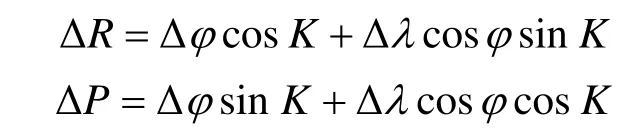
由图1可知两条舰位线的方程式分别为:

式中,Δφ,Δω分别为纬度和东西距,Δω= Δλcosφ0;
AC1,AC2为两天体的计算方位;
Δh1,Δh2为两天体的真实高度和计算高度之差。
经推导得两星定位公式:

b.三星定位公式
经推导可得三星定位的公式为:
1.2 天文定向原理
天文定向前,必须获得精确舰位,否则舰位误差将带来定向误差。
已知观测时刻t0,精确舰位λ0、φ0,根据天体对测者的地方时角和天体的地平方位角公式有:
所以,
根据tgA0的分子、分母的正负判断象限,即可求得星体精确方位A0。
则观测瞬间的真航向K0即为:
式中,qL为观测瞬间星体的舷角。
这就是天文定航向原理。
根据天文定位误差和惯性导航系统提供的航向、姿态角信息,即可得到惯性导航系统的水平姿态误差:
1.3 天文航姿测量系统组成
天文航姿测量系统由天文测量设备主体和控制机柜两大部分组成。
天文测量设备主体主要由俯仰和方位轴系、测角传感器、驱动电机、导电滑环、昼夜测星通道和目标观测通道等组成。控制机柜由伺服控制分系统、电视测量分系统、视频监控分系统、主控计算机、时统分系统、数据通信分系统、数据录取处理分系统、操纵控制分系统等组成。
1.4 系统功能
系统具有昼夜观测恒星的能力;通过测量恒星的舷角和甲板高度角解算出惯性导航系统的航向误差,同时对惯性导航系统的水平姿态误差进行考核;为惯性导航系统综合校准提供舰船航向基准信息。
2 系统方案设计
2.1 天文测量设备主体
天文测量设备主体由高度和方位轴系、测角传感器、昼夜测星和目标观测通道、驱动电机、导电滑环等组成。
天文测量设备主体露天工作,俯仰轴系、方位轴系通过密封环节严格水密,密封环节采用O形密封圈设计;方位轴上设置导电滑环;方位座内部设计有电缆连接通道,昼夜测星和目标观测单元的所有电气走线均通过该通道,与外部电气控制机柜连接,连接的电缆插座设置在方位座底部,方便安装和维修;设置专用的水平基准面和方位基准镜,便于设备在舰船安装标校。
2.2 昼夜测星光学系统
根据天文经纬仪研制合同中白天检测+3.0等星和夜间测+4.0等星要求,昼夜测星光学系统应具有较好地抑制白天背景光和增强星光信号的能力,采用折反射光路进行设计以减小经纬仪体积。
根据星光和 CCD传感器光谱敏感特性,设计滤光片,提高星光与背景光的光学对比度。
昼夜测星光学系统由保护玻璃窗口、遮光罩、主、副反射镜等组成。
白天测星能力与光学系统的口径焦距比有较大关系,长焦距光学系统有利于抑制背景光强度,有利于提高测星等级,为了满足白天检测+3等星的技术指标要求,昼夜测星光学系统焦距设计为2500 mm。
在昼夜测星光机组件中,采用遮光罩减少外部杂光进入;在光路中设置消杂光光栅,主镜筒壁采用消杂光设计,对镜筒内壁进行消光处理。
在昼夜测星光学系统的焦面上安装高灵敏度的CCD摄像机。在测星CCD靶面前方设计有强光保护机构,当视场中出现太阳或强光时,强光保护机构控制电机,转动遮光板挡住 CCD,保护 CCD靶面不受灼伤。根据星光和白天天空背景光特点设计滤光镜。
2.3 目标测量光学系统
目标测量光学系统由保护玻璃窗口、透镜组和太阳滤光镜、斜平板、自准直分划板和光源等组成。目标观测光学系统主要完成观测太阳进行定向,其次利用该通道完成对目标跟踪与观测,在光路中增加光源和自准直分划板等部分,实现系统快速标校功能。
目标观测光学系统的光轴和昼夜测星光学系统光轴为平行设计,白天测量太阳解算航向时切入滤光片Ⅰ,目标跟踪时,切入滤光片Ⅱ,夜间工作时切入滤光片Ⅲ。
自准直光源和分划板设置为系统快速标校提供手段,方位标校时自准直光源打开,分划标线引出,经五角棱镜后由方位基准镜反射,成像在CCD靶面上,由图像检测模块直接测出方位零值;正常测太阳或跟踪目标时关闭分划板光源,太阳(或目标)图像直接成像在CCD靶面上。
2.4 伺服控制分系统
伺服控制系统采用全数字控制,数引随动跟踪。数字控制器采用PCI04嵌入式工控计算机完成,速度和位置反馈采用角编码器,功率级采用上下臂同时控制H桥式功率级,执行电机采用直流力矩电机。系统的结构框图如图2所示。
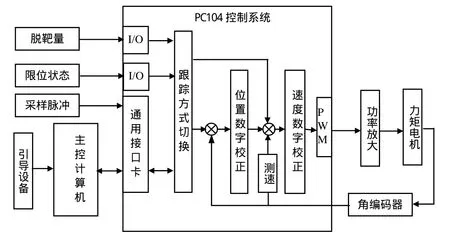
图2 系统的结构框图
主要任务是由计算机控制驱动天文经纬仪实现方位和俯仰回转,自动跟踪船体摇摆瞄准星体,自动换星,使星体在视场内完成预定的测量动作,其工作方式包括:
寻星:当星体资料和时间参数给定后,通过软件启动伺服控制系统驱动天文经纬仪捕获星体。
测量:星体捕获后,电视测量系统接受指令开始测量,通过电视处理器计算天体的脱靶量等参数,给出天体的甲板高度角和舷角。
换星:在进行双星定位或三星定位时,完成第一颗星的测量后,按照预定的测量顺序驱动天文经纬仪自动寻找需要测量的第二颗星。这样直至测量完毕,计算完成后输出测量结果,等待下一次测量指令。
2.5 电视测量分系统
由望远镜、图像传感器、电视处理器三部分组成。
望远镜:光学系统采用透射式结构,具有自动调光、调焦功能,可根据目标的距离和光强实现自动调光、调焦,使CCD探测器得到清晰图像。
图像传感器:由图像接收器、图像驱动器和图像信号处理器三部分组成。光学图像经图像传感器电荷耦合后转换成模拟视频信号,经并行A/D转换成数字图像信号,分为两路输出:一路由 AD7127转换成SVGA信号,作为视频输出,用于系统工作监视。一路经图像传感器输出传送给图像处理器。如图3所示。
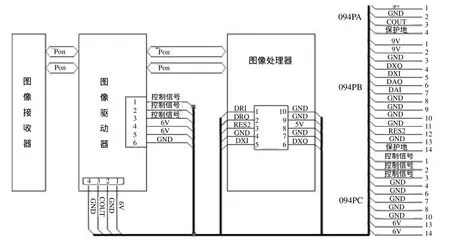
图3 图像传感器
电视处理器:根据使用环境的要求实现目标的稳定跟踪和测量,使用全数字化超高速数字处理器,通过并行处理技术满足系统总体要求。由于被跟踪测量的目标小,而且无动力,基本为暗目标,而且目标与背景的对比度较小,为了实现弱信号提取,采用数字图象处理,增强目标与背景的对比度,对小目标增大,可变带通滤波器等技术。电视跟踪器采用了先进的预处理电路、高速A/D数据采集以及高速信号处理器和相应的数字视频信号处理软件。
2.6 主控计算机
主控计算机主要完成与经纬仪通信系统、惯性导航系统和数据处理系统的通信。控制计算机对外接口逻辑框图如图4所示。
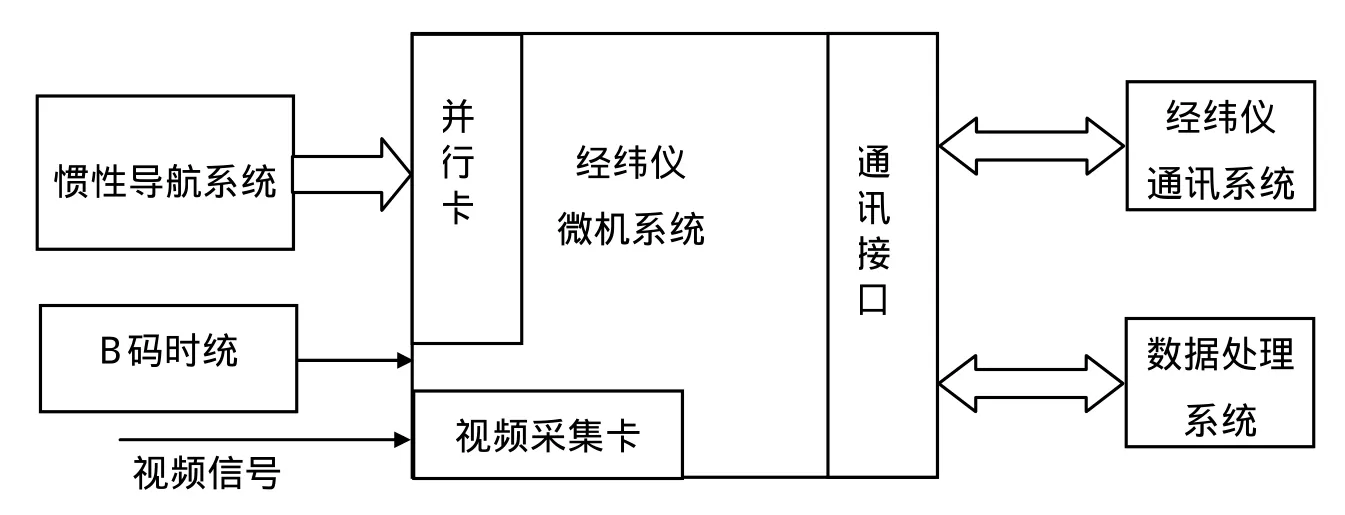
图4 控制计算机对外接口逻辑框图
以50Hz频率并行采集惯性导航系统姿态数据,采集经纬仪通信管理系统发送的经纬仪实测信息,同时将引导信息发送到经纬仪通信管理系统实现对经纬仪的引导。控制计算机与B码时统通信采用I/O读写方式读取时间码,向时统卡发送工作状态。控制计算机将实时解算的航向偏差输出到数据处理系统。
采用最小二乘法进行船体速度位置预测,进行大地坐标系到甲板坐标系转换和前馈处理,形成测量系统的引导值,实现在无机械稳定平台下的星体跟踪测量。
2.7 软件方案计
系统软件设计中,在同时兼顾数据处理和存储的情况下,合理设计各软件模块的数据结构,选取合理的数据处理算法,充分发挥现有的硬件资源,满足各项功能和性能上的要求。
程序采用模块化的设计思想,动态地加载和释放各个功能模块,实现各功能模块的分时运行;程序主要包括三个一级模块和六个二级模块,各模块采用不同优先级的多线程工作方式,可对各事件、中断做出快速响应;采用面向对象的设计思想,将整个软件分成不同层次结构的模块,以利于减少软件开发的工作量,便于多人协同编程、调试、排错和修改,同时可以降低系统的维护成本,提高软件的可靠性与可维护性。计算机主控软件总体流程框图如图5所示。
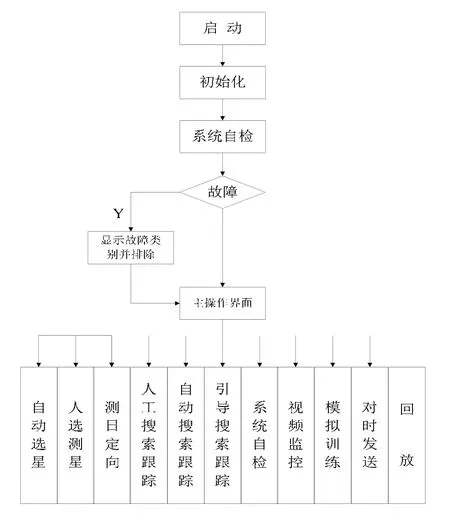
图5 计算机主控软件总体流程框图
3 试验验证与分析
试验验证方案采用静态试验和动态试验相结合的方式进行,静态试验主要考核检测单元对目标方位角和高度角测量精度。动态试验主要考核检测单元在接近舰船实际摇摆状态下对目标的跟踪和测量精度。
3.1 静态试验验证与分析
系统星体检测单元接收授时型 GPS提供的时间和位置信息,在静态情况下进行验证试验,试验结束后,将系统记录的一次差数据进行事后处理,得到试验数据为白天测量太阳和恒星所得到的地平方位角误差和地平高度角误差曲线,如图6所示。
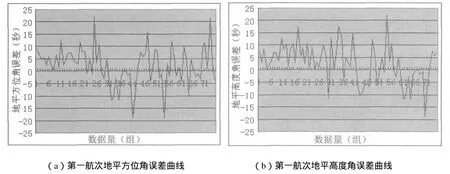
图6 白天测量天体误差曲线
从以上数据处理结果可以看出,在静态情况下,星体检测单元所得的方位角误差和高度角误差比较稳定,由于检测单元安装标校存在一定的误差,特别是方位对准误差将直接影响方位角测量精度,同时由于测角元件存在5"左右的误差,在扣除上述两种影响因素后,星体检测单元具有很高的测量精度。
3.2 动态试验验证与分析
摇摆台和系统检测单元同时开机,系统测量设备实时录取摇摆台提供的摇摆角信息和授时型GPS提供的时间和位置信息,通过天文解算得到航向和姿态误差信息,得到系统一次差。试验结束后,将系统记录的一次差数据进行事后处理,试验数据为夜间测量星体模拟装置得到系统的航向和水平姿态误差,误差曲线如图7所示。
将系统记录的夜间测星定向的航向角一次差数据进行事后处理后得到:;
将系统记录的夜间测星定姿的纵摇角一次差数据进行事后处理后得到:;
将系统记录的夜间测星定姿的横摇角一次差数据进行事后处理后得到:。
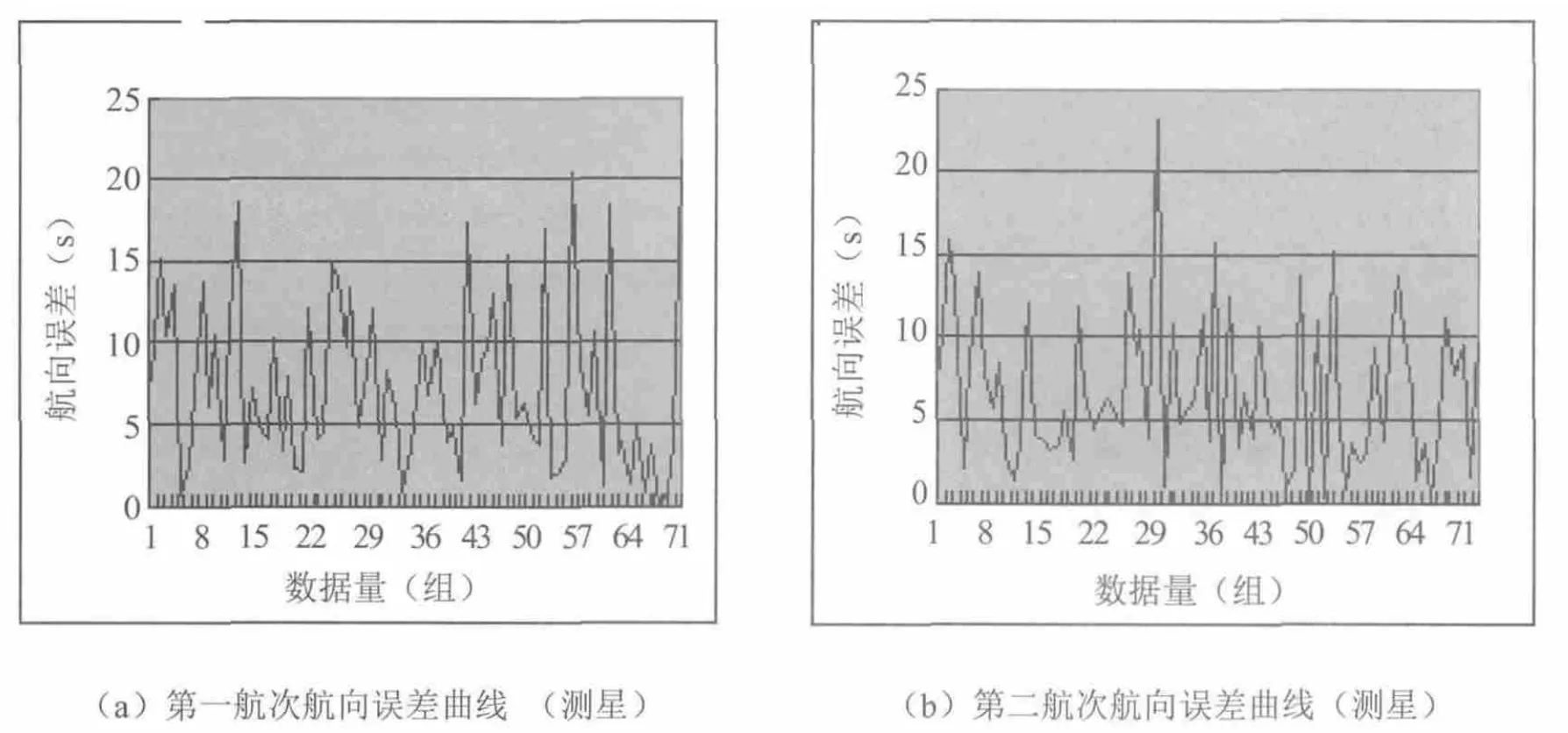
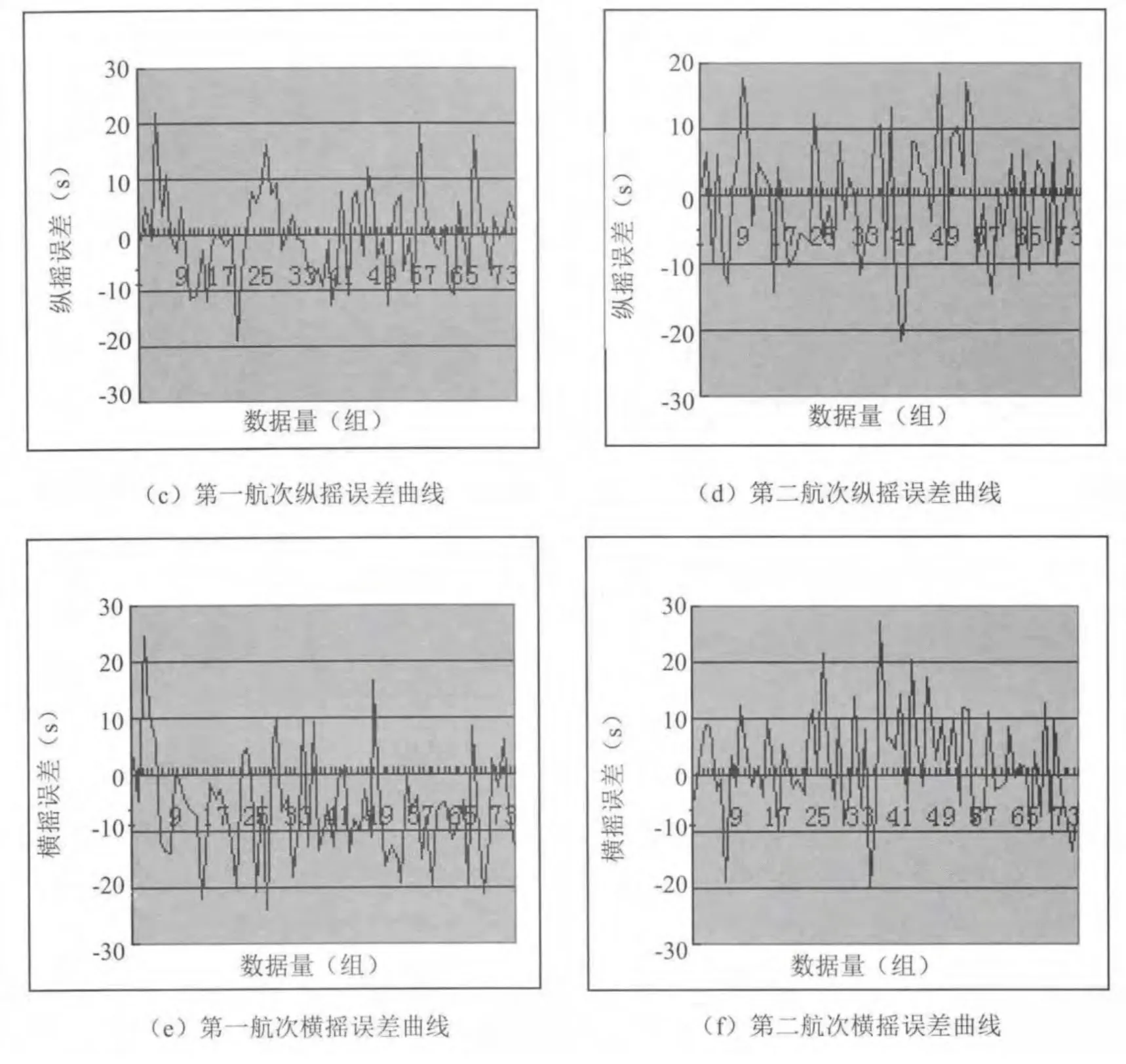
图7 夜间测星定向定姿误差曲线
从以上试验数据的统计结果可以看出,在动态测量的情况下,系统的航向和水平姿态误差比较稳定,由于星体检测单元测角元件存在 5"左右的误差,三轴模拟试验台轴角输出具有一定的误差,可以认为测量误差主要是由于测角元件和三轴转台轴角输出引起的,星体检测单元本身具有很高的测量精度,满足系统设计要求。
4 结束语
本文详细论述了天文航姿测量系统的工作原理和单机分系统设计方案,最后进行了试验验证及试验数据结果分析。试验结果表明系统的各项技术指标完全满足船用惯导系统试验使用要求,具有精度高,数据自动化处理,测量手段灵活,使用范围广泛等特点,具有广阔的应用前景。
[1]袁信,俞济祥,陈哲.导航系统[M].北京:航空工业出版社,1993.
[2]郭敬枢,庄继东,孔峰.微机控制技术[M].重庆:重庆大学出版社,2001.
[3]申功勋,孙建峰.信息融合理论[M].北京:国防工业出版社,1998.
[4]张云熙.现代图像元器件及设备指南[M].北京:国防工业出版社,1999.