北京地铁5号线调整ATO及制动系统控制策略
2015-12-30庞涛
庞 涛
北京地铁5号线自2007年开通列车自动防护(ATP)运营后,列车自动驾驶 (ATO)功能一直处于调试状态。调试过程中发现,在正线吸能装置未投入使用的情况下,电制动不稳定并随机出现“电制动-空气制动”频繁切换,使列车综合制动性能欠佳,导致ATO停车不准。经过深入研究,最终通过修改ATO控车策略、优化制动软件,实现ATO精确停车。
1 ATO控车方式
北京地铁5号线车载ATO子系统利用正线ATO地面环路定位,通过测试电机完成测速、测距;利用ATO环路交叉点的零电位进行里程校准,并通过 “轮径校正开关粗调+内置补偿参数微调”的方式,实现轮径补偿,提高测速及测距的准确性和自适应性。相对移动闭塞系统 (CBTC)而言,ATO控车方式为:①地面ATP子系统、ATO子系统室内外设备互相独立,不存在数据连接;②车载ATP子系统、ATO子系统安装在同一机柜,但控制模块互相独立 (背板传输数据)、定位方式不同,具有较强的独立性;③车载ATO子系统数据传输为 “地面→车上”单向进行。
ATP子系统提供安全防护,是ATO子系统能够正常工作的基础。ATO子系统实现列车自动控制方式及步骤为:①读取列车信息、检查设备状态;②读取定位信息、线路信息;③读取远程发送的控车指令,如运行等级、跳停等;④根据定位信息及外部输入的控车命令控制列车运行速度;⑤计算预期加速度,并以此进行控车。
北京地铁5号线ATO控车方式及关系如图1所示。
2 实现ATO精确停车的解决方案
为了实现ATO精确停车,需具备精确的距离测量精度,以线性度、响应性良好的制动系统为基础,主要从优化ATO控车方式,改善制动系统综合性能2方面入手。
2.1 针对ATO控车方式的调整
北京地铁5号线最初ATO控车策略中,列车进站停车是基于0.8m/s2的主体制动率,在此过程中若ATO请求的制动率频繁变化,则要求制动系统有良好的线性度、响应性。但因地面吸能装置未投入使用,接触轨网压剧烈变化,导致随机出现“电制动-空气制动”的切换,造成制动系统综合输出的线性度较差。如 “电-空制动切换”发生时,距离标准停车位置较近,则ATO难以完成有效调整,从而导致停车精度较差。
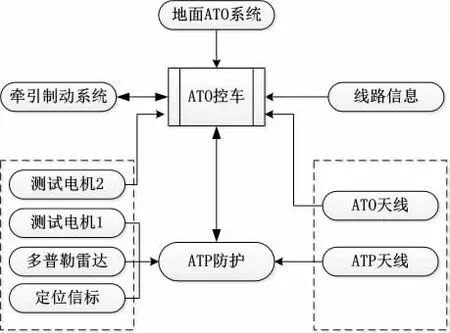
图1 ATO控车关系示意图
鉴于此种情况,通过修改ATO核心控制软件,将列车控制策略转变为 “阶梯式控制”,从而使制动率变化更为平滑,减小制动率突变所带来的响应延时,增加ATO控制精准度。经过4个版本近百次数据调整,最终将ATO停车分为4个阶段,每个阶段配置不同的制动率,如图2所示。
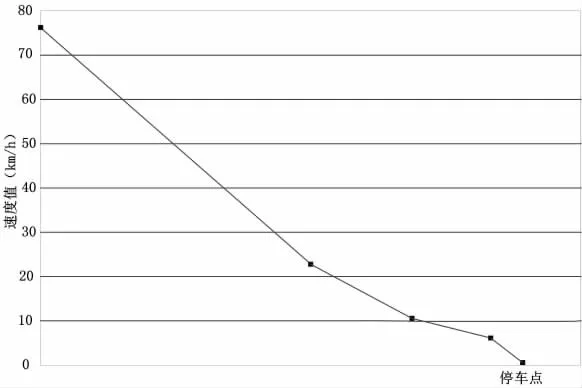
图2 最终版ATO控车策略示意图
2.2 针对制动系统性能的调整
北京地铁5号线在城市轨道交通领域内,虽然率先提出 “全电制动停车”的概念,但鉴于种种原因,地面吸能未能投入使用。为此针对制动系统做如下优化。
2.2.1 空气制动软件优化
城市轨道交通系统中,列车制动方式包括空气制动及电制动2种,其中空气制动 (也叫摩擦制动)是基础制动系统。在前期测试过程中发现,最初版本的空气制动软件对各制动指令的相应曲线线性度较差,制动率呈现马鞍形曲线。如图3所示。
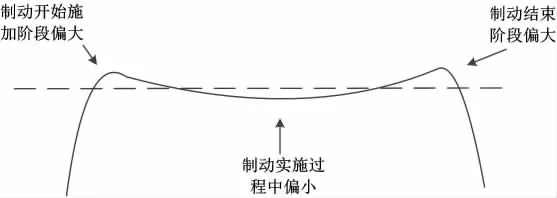
图3 旧版空气制动软件特性示意图
制动系统专家优化调整了空气制动的核心控制参数,并发布新版空气制动软件,极大地改善了空气制动线性度。实测结果见图4。
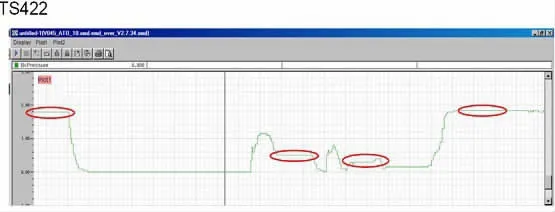
图4 新版空气制动软件特性示意图
由图4可以看出,新版空气制动软件无论在紧急制动、最大常用制动还是中间制动级位,其实际响应的线性度较好 (图中圈所示),从而确保了新版空气制动能够满足要求。
2.2.2 电牵引/制动软件优化
1.提高电制动主动切换空气制动的速度阈值。在制动系统初始设计中,当速度降低到3km/h左右,列车将主动由电制动切换到空气制动。考虑到空气制动固有延时等因素,新版电制动软件中将该主动切换点提高到8km/h,如图5所示。修改后极大降低了ATO停车前低速运行时“电-空制动切换”对停车精度的影响,为最终实现ATO精确停车提供了基本条件保障。

图5 调整电空制动切换点示意图
2.优化 “电-空制动”主动转换的控制策略。具体修改方式是将电制动扭矩电流缩减限位值T与再生扭矩电流R进行比较,在T-R=200A时(原始设计为T-R=0A),由VVVF逆变器传送到EBCU单元的电制动反馈信号逐渐停止,使得空气制动提前开始启动。如图6所示。
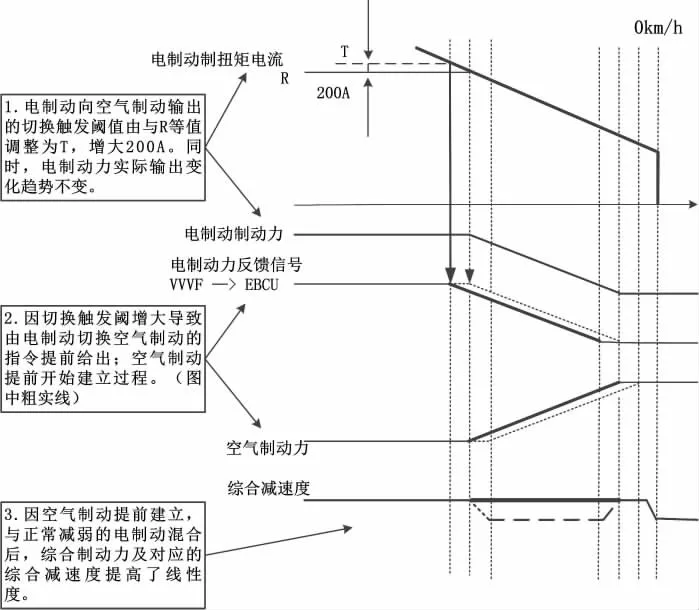
图6 调整空气制动启动时机示意图
修改后使得列车在停车前低速运行的阶段内,如由电制动切换到空气制动时,综合制动力基本保持不变。
3.修改电制动扭矩电流设置。根据北京地铁5号线空气制动系统理论模型,气缸BC压力启动延时为0.4s,BC压力由0上升到100%需2s(按均匀变化考虑)。假定列车按照1.00m/s2的平均减速度由80km/h (22.2m/s)制动停车,根据速度公式Vt=V0+at可知列车停车用时22.2s。考虑到空气制动存在制动力过冲及回归现象,可将列车制动过程示意如图7所示。
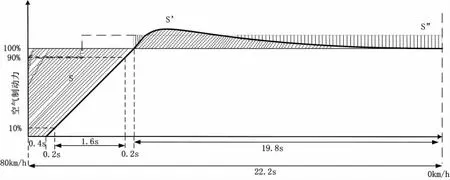
图7 电制动扭矩电路修改示意图
BC压延时导致空气制动力不足的量为图7中阴影S的面积,即S=0.4s×1+ (2s×1/2)=1.4。如采用瞬间提高空气制动力补足空气制动延时影响的方式,则图7中超出预期值的阴影S′与阴影S面积需相等,即S=S′。将阴影S′等效为X×19.8s的长方形S″,则S″=X×19.8s=1.4。由此可知X =0.07,也即瞬间提高的空气制动力是原来的1.07倍。为实现此目标,需将电制动的扭矩电流增大1.07倍,同时考虑到制动闸瓦等因素影响,可将电制动扭矩电流增大到1.10倍。
3 总结
站台精确停车是ATO系统核心功能,也是工程实施中的难点。在短时间内无法改变外界环境的情况下,信号专业、车辆专业之间深入合作,通过优化ATO控车方式,调整制动软件配置参数,最终将北京地铁5号线ATO停车精度基本控制在±30cm之内,超过±50cm的情况基本消除,具备投入载客运营的条件。目前,北京地铁5号线ATO已经通过行业专家评审,并已载客运营,效果良好。
[1] EN 1352-1Railway applications-Braking-Mass transit brake systems-Part 1:Performance requirements.
[2] EN 1352-1Railway applications-Braking-Mass transit brake systems-Part2:Methods of test.
[3] 郑理华 .基于 CTCS-2-200C的城际列控车载ATP总体技术方案的研究与实现[J].铁道通信信号,2014(12):9-12.
[4] 史增树,崔金芳.ATO系统在城际铁路中的应用方案研究[J].铁道通信信号,2013(增刊):30-32.