变步长自适应结构振动主动控制算法
2015-12-30浦玉学,张方,姜金辉
第一作者浦玉学男,博士生,1987年12月生
通信作者张方男,教授,博士生导师,1962年8月生
变步长自适应结构振动主动控制算法
浦玉学,张方,姜金辉(南京航空航天大学机械结构力学及控制国家重点实验室,南京210016)
摘要:提出基于次级通道在线辨识的变步长振动主动控制算法,给出主动控制环节收敛步长、次级通路建模环节收敛步长的调整策略及新的附加噪声功率控制策略。此调整策略完全由初级振动、残余振动及附加随机噪声信号功率决定,无需额外引入经验参数,可简化系统算法复杂度,提高算法收敛性能,实现对附加随机噪声功率的调节,在保证系统稳定情况尽量消除其对残余噪声影响。仿真结果表明,与已有算法相比,该算法在收敛性能、振动控制效果两方面更具优势。基于NI CRIO实时控制器进行简支梁振动主动控制试验表明,该控制系统对简支梁振动响应有较好的抑制作用,对初级振动频率具有较好的跟踪性能。即基于次级通道在线辨识的主动控制方法行之有效。
关键词:振动主动控制;次级通道在线辨识;变步长;FXLMS算法;NI CRIO
基金项目:航空科学基金(2012ZA52001);高等学校博士学科点专项科研基金(20123218120005);国家自然科学基金资助项目(51305197);江苏高校优势学科建设工程资助项目
收稿日期:2014-05-15修改稿收到日期:2014-06-03
中图分类号:TB535;TP 273.2文献标志码:A
A varying step adaptive algorithm for structural vibration active control
PUYu-xue,ZHANGFang,JIANGJin-hui(State Key Laboratory of Mechanics and Control of Mechanical Structures,Nanjing University of Aeronautics and Astronautics, Nanjing 210016,China)
Abstract:Here, a kind of variable step size active vibration control algorithm was proposed based on the online secondary path recongnition method. The adjusting rules of step size for active control part and secondary path modeling part were presented in the proposed method. An auxiliary noise scheduling strategy was given to adjust the power of the auxiliary random noise. These adjusting rules were decided by the powers of the primary vibration, residual vibration and auxiliary noise. There was no need to set any experienced parameters before the control system working. The convergence of the algorithm was improved, and the complexity of the algorithm was simplified. Under the premise of guaranteeing the system stability, the auxiliary noise scheduling strategy could eliminate the influence of the auxiliary noise on the residual noise as much as possible. Simulation results showed that the proposed algorithm has a good performance in convergence and vibration control effects comparing with previous algorithms. An active vibration control test of a simply supported beam was made based on a NI CRIO real-time controller. The results showed that the vibration response of the beam is effectively attenuated, and the proposed method can track changes of the primary vibration frequency; good attenuation of structural vibration and the effectiveness of the proposed method are fully verified.
Key words:active vibration control; online secondary path recongnition; varying step; FXLMS; NI CRIO
自适应振动主动控制方法基本原理采用在结构上直接附加力源 (或称作动器),通过自适应控制律调节输出控制信号,驱动作动器激发结构次级振动与初级振动抵消,达到振动控制目的[1]。自适应主动控制系统与自适应信号处理系统区别于在于前者存在次级通道(作动器到误差传感器的通道Secondary Path),且对振动主动控制算法实现、系统收敛性及控制效果有重要影响。常用的自适应主动控制算法是将次级通道考虑在内的FXLMS(Filtered-x Least Mean Square)算法[2]。文献[3]讨论了次级通道辨识误差对主动控制系统影响。如何对次级通道进行快速、精确辨识,是振动主动控制系统设计时必须考虑的关键问题之一。对次级通道建模有离线建模及在线建模两种,若在主动控制期间,次级通路系统特性基本保持不变或变化缓慢,采用离线建模方式能简化控制算法;而当系统特性改变较明显时则应采用在线建模以确保满足控制系统稳定性及控制精度要求。
1常规次级通道在线辨识主动控制算法
基本的次级通道在线辨识方法由Eriksson 等[4]提出,见图1。图中P(n)为初级通路,指初级振源(激振器)到待控制点的传递函数;S(n)为由作动器到待控制点次级通路的传递函数,即复杂的电声耦合系统;x(n)为参考信号;e(n)为待控制点处误差传感器检测的残余振动响应信号;v(n)为与参考信号不相关的随机噪声,作为次级通道自适应在线辨识滤波器S′(n)的输入。
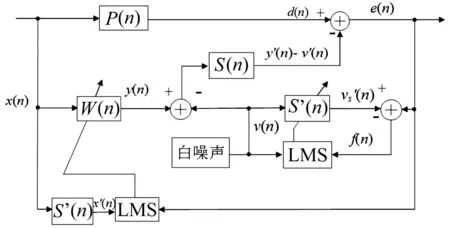
图1 Eriksson 次级通道在线辨识算法框图 Fig.1 Erilsson’s method for online secondary path modeling
主动控制器权系数、次级通路建模滤波器权系数通过FXLMS及LMS算法迭代更新获得,即
W(n+1)=W(n)+μwx′(n)e(n)
(1)
S′(n+1)=S′(n)+μsV(n)f(n)
(2)
式中:μw,μs为收敛步长。
f(n)=e(n)-v′s(n)
(3)
(4)
附加随机噪声v(n)经S′(n)的输出为
(5)
在主动控制器输出端附加与参考信号不相关的随机高斯白噪声会在待控制点的残余振动量e(n)中体现出来,即
e(n)=[d(n)-y′(n)]+v′(n)
(6)
进一步推导有
e(n)=[p(n)x(n)-s(n)y(n)]+[s(n)v(n)]
式中:[s(n)v(n)]作为次级通道在线辨识环节引入附加随机噪声对主动控制环节的收敛性能影响。尤其当W(n)逼近Wopt时,此影响更明显。
为改善主动控制、误差通道辨识环节相互影响严重,张明等[5-6]提出通过增加第三个自适应滤波器消除此种影响,但由于滤波器数目增加会致计算量增大,影响控制算法的使用效率,且无法解决附加随机噪声从残余振动中剔除问题。而Akhtar等[7-8]提出的变步长算法(VSS-LMS)辨识次级通道普受关注,在尽量避免主动控制环节、误差通道辨识环节相互影响的同时,加快了次级通道在线建模的收敛速度,但同样以加大计算量为代价,且收敛因子的调整策略基于经验公式判定,算法特性、理论分析较困难。
2改进变步长次级通道在线辨识主动控制算法
综合各种在线建模算法特点,本文基于最简单的前馈式 FXLMS 控制模型[9-10],构造出新的变步长基于次级通道在线辨识的自适应主动控制算法,对次级通路在线建模算法进行改进:①给出简单的收敛步长调整策略,完全由初级振动、残余振动及附加随机噪声信号功率决定,无需额外引入经验参数,且避免使用第三个自适应滤波器,可简化系统算法的复杂度,提高收敛性能。②基于能量控制策略实现对附加随机噪声功率调节,在保证消除主动控制环节与次级通道辨识环节相互影响前提下,有效消除附加随机信号对待控制区域残余振动影响。
2.1变步长次级通道辨识算法
次级通道在线辨识滤波器完成收敛后,为实现消除附加随机噪声对主动控制滤波环节收敛性能影响,用误差信号g(n)作为次级通道在线辨识滤波器权系数更新的误差信号[6],但无法完全消除主动控制环节对次级通道辨识环节影响。该算法中次级通道在线辨识滤波器权系数通过LMS 算法迭代更新为
g(n)=f(n)-d′(n)+y′s(n)=
[d(n)-d′(n)]+[YTM(n)-
VTM(n)][S(n)-S′(n)]
当W(n)收敛到Wopt时,d(n)-d′(n)=0,d(n)=y′(n),g(n)不能做到与附加随机信号v(n)完全相关,亦与控制信号y(n)存在相关性,说明主动控制环节对在线辨识环节影响未完全消除。为此,本文用信号f(n)作为次级通道在线辨识滤波器权系数更新的误差信号,提出变步长自适应主动控制算法,框图见图2。
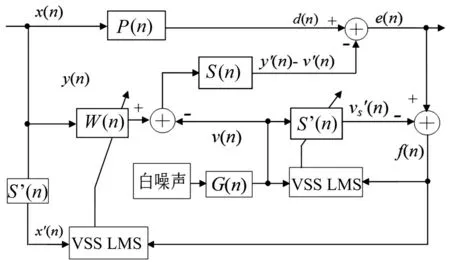
图2 改进次级通道在线辨识算法框图 Fig.2 The proposed method for online secondary path modeling
对f(n)进一步分析
f(n)=[d(n)-y′(n)]+VT(n)ΔS(n)
(7)
式中:[d(n)-y′(n)]为主动控制环节对次级通道在线辨识环节收敛性能影响。当W(n)收敛时,d(n)-y′(n)=0, f(n)与v(n)为完全相关分量,即主动控制环节对在线辨识环节影响完全消除。
将式(7)变换到z域下,得
F(z)=[P(z)-S(z)W(z)]X(z)+
[S(z)-S′(z)]V(z)
随次级通道在线辨识滤波器S′(z)收敛,理想状况下误差信号F(z)收敛至零,即
仅当W(z)收敛于最优值Wopt(z)即时域下[d(n)-y′(n)]为零时,S′(z)才会收敛到真实的次级通道S(z)。在主动控制环节完全收敛前尤其辨识开始阶段,[d(n)-y′(n)]作为干扰信号对次级通道在线辨识过程影响不可忽视,否则会大大降低在线辨识环节收敛性能。
若能获得次级通道的辨识误差ΔS(n),即可从f(n)中将干扰信号[d(n)-y′(n)]直接剔除。Carini人工系数延迟技术对次级通道辨识误差的在线辨识虽有一定精度,但对次级通道变化的跟踪性较差、 计算量较大。因此给出近似的辨识误差估计方法,定义变量为
σ(n)=Pv(n)/Pe(n)
(8)
式中:Pv(n),Pe(n) 分别为v(n),e(n)功率。
由于v(n)与x(n)不相关,对σ(n)进一步推导得

S′(n+1)=S′(n)+μsV(n)σ(n)f(n)
(9)
为与式(3)形式统一,提出新的采用次级通道在线辨识步长调整表达式为
(10)
可见 μs(n)可据干扰信号[d(n)-y′(n)]大小自适应的改变次级通道滤波器收敛步长,降低主动控制环节对次级通道在线辨识环节收敛性影响,提高次级通道在线建模的收敛性。
2.2变步长主动控制算法
为避免系统发散,主动控制环节的收敛因子被设置为远小于1的正常数。据系统状态自适应调整μw的值,可进一步改善系统降噪量及权系数的收敛速度。Davari等[11]通过分析参考信号及附加随机噪声功率对主动控制环节收敛性影响,获得μw据Pv(n)/Px(n)变化的结论。因参考信号功率增加系统趋于发散,故μw值会变小;而附加随机噪声功率增大,则次级通道建模环节收敛性变好,μw调整为大值可进一步改善系统收敛性。从控制环节滤波器权系数更新公式可知,权系数的收敛性不仅受参考信号、附加随机信号影响,亦受误差信号f(n)影响:在线辨识初始辨识误差较大,干扰误差信号对主动环节收敛性及稳定性影响较大。为防止控制系统发散,μw须为较小值,而当辨识环节收敛后,辨识误差对系统性能影响变小,μw可相应变大。据以上分析,本文给出μw的变步长策略,即
(11)
式中:Pv(n)、Px(n)、Pf(n) 分别为参考信号x(n)、附加随机噪声信号v(n)及误差信号f(n)的功率。计算式为
Pv(n)=λPv(n-1)+(1-λ)v2(n)
Px(n)=λPx(n-1)+(1-λ)x2(n)
Pf(n)=λPf(n-1)+(1-λ)f2(n)
式中:λ为遗忘因子(0.9<λ<1)。
2.3自适应附加随机噪声调整策略
在控制信号中附加随机噪声实现次级通道在线辨识存在难以忽视问题,即附加随机白噪声会在待控制残余振动量中呈现。采用大功率白噪声虽利于次级通道辨识但会降低主动振动控制减振效果。为此,本文提出附加随机噪声的调整策略,即辨识误差较大时附加噪声以较大功率输出保证次级通路辨识环节的收敛性能;系统收敛后次级通路辨识误差较小时可将附加噪声调整到较小值。
v(n)=G(n)vm(n)
式中:vm(n)为幅值=1的单位高斯白噪声信号;G(n)=Pf(n)/Pe(n)。
由于v′(n),d(n)与y′(n)不相关,对G(n)进一步推导可得
主动振动控制系统工作初始阶段,待控制点的初级振动量级远大于附加的随机信号v(n)。此时 n=0,控制信号y′(n)=0,于是有 P[d(n)-y′(n)](n)≫Pv′(n)且有P[d(n)-y′(n)](n)≫P[v′(n)-v′s(n)] ,故G(n)≈1。当系统收敛稳定后y′(n)→d(n), v′s(n)→v′(n),此时G(n)→0, 附加随机噪声对待控制点残余振动量的叠加基本消除。当初级振动量功率较大时,需较大随机噪声用于次级通道的在线辨识,否则小功率附加白噪声会被强干扰信号淹没。将参考信号的功率考虑到附加随机噪声的调整策略中,得附加随机噪声的调整策略为
(12)
2.4计算量比较
单次迭代计算量比较见表 1。其中M,N 为初级通道、次级通路等效FIR滤波器权系数阶数;H为文献[6]中第三个滤波器权系数阶数;D为Carini 方法中人工延迟系数长度。由表 1 可知,本文算法计算量远少于其它四种。因本文的次级通道在线辨识方法较文献[6]少一个自适应滤波器,较Carini及Akhtar算法,变步长策略有较大简化,算法复杂度极大减小。由于引入主动控制滤波器、次级通道在线辨识滤波器的变步长计算公式及附加随机噪声调整公式,本文算法略多于 Eriksson 算法,但此为更好消除主动控制环节、次级通道辨识环节相互影响,降低附加随机噪声对残余振动量影响。
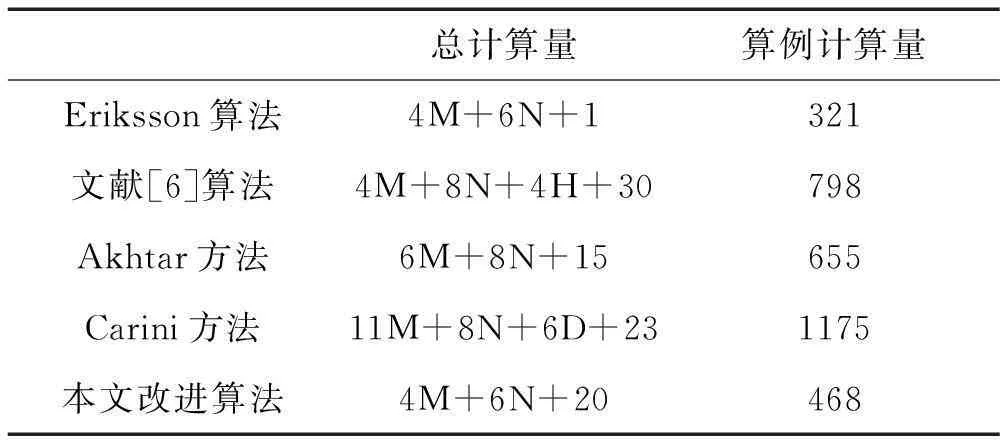
表1 单次迭代计算量比较
注:M=64, N=32, H=64, D=32。
3结构响应主动控制仿真
为评价所提次级通道在线辨识算法的性能, 基于LABVIEW语言将Eriksson、Akhtar、文献[6]及本文算法进行主动控制仿真。为准确衡量在线辨识收敛性能辨识精确性,定义次级通路辨识误差为
(13)
为直观衡量系统的减振性能,定义衡量标准为
(14)
R(n)值越大系统降噪量越大,反之亦然。
为衡量附加随机噪声对残余振动量影响,定义贡献率为
(15)
k(n)值越大说明附加随机噪声对参与振动量贡献越大,反之亦然。
将简支梁主动控制实验测得传递函数转换为32阶、64阶FIR型滤波器系数作为仿真实验的初级、次级通路的传递函数,见图3。图中实线表示算例1、2初级、次级通道变化前传递函数,虚线表示算例2初级、次级通道变化后传递函数。
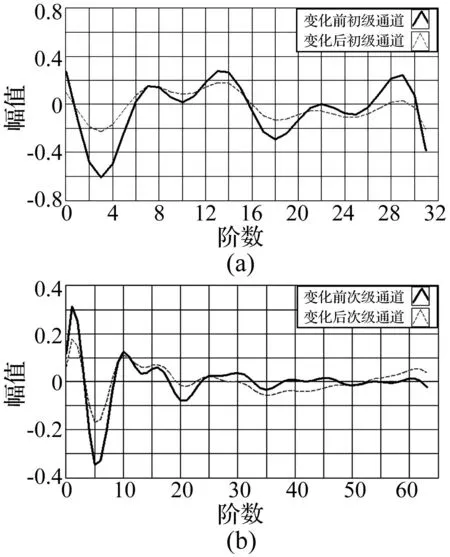
图3 变化前后初级、次级通道传递函数 Fig.3 The vibration paths of primary path and secondary path before and after changed
3.1定频振动信号控制算例仿真
设初级振动信号为一正弦信号与高斯白噪声合成信号,信噪比(SNR)30 dB。正弦信号频率50 Hz,幅值2。附加随机噪声为零均值高斯白噪声信号,标准差0.1。仿真中各种算法的参数均按能获得最佳减振效果设置,仿真结果见图4。由图4(a)看出,本文算法较Eriksson、Akhtar、文献[6]算法,次级通道辨识误差S(n)很快稳定下降到-42 dB。说明次级通道估值能更快速收敛于次级通道真实值。图4(b)为本文算法与其它两种算法对降噪性能R(n)的比较,可知通过自适应调节主动控制环节收敛步长大小,本文算法减振性能更好。图4(c)为附加随机噪声对残余振动量贡献率曲线k(n)随迭代次数变化曲线。采用本文调整策略,附加随机噪声对残余振动量贡献率当次级通道在线辨识滤波器收敛后,可被控制在较小量级。说明随次级通道估计值逐渐收敛到真实值,G(n)值相应降低到零,附加随机噪声对待控制点残余振动量贡献被消除。未采用附加噪声调整策略时,当次级通道在线辨识滤波器收敛后,随机噪声一直存在于残余振动中。图4(d)为主动控制滤波器及次级通道在线辨识滤波器迭代更新的收敛步长变化曲线,可见当系统开始工作时,主动控制环节及次级通道建模环节相互影响严重,此时为避免发散,收敛因子处于较小值;随系统逐渐收敛,二者之间相互影响减弱,收敛因子值逐渐增大,系统收敛速度加快。

图4 简谐振动主动控制仿真结果 Fig.4 Performance comparison on fixed-frequency vibration control
3.2次级声道突变控制算例
考虑特殊情况,即次级声道在控制过程中发生突变。仿真控制系统初级振动信号、附加随机噪声信号按上节情况设置。初级通道、次级通道变化前后传递函数同图3,系统迭代40000次时产生突变。
图5为次级通道突变的控制仿真结果。由图5(a)看出,本算法在通道变化前后或次级通道在线建模的收敛速度或建模精度均优于Eriksson、Akhtar、文献[6]算法。由图5(b)看出,次级通道变化前后,采用本文在线辨识方法主动控制系统的初级、次级通道变化均获得最好减振效果。由图5(c)看出,附加随机噪声对残余振动量贡献率k(n)在初级、次级通道突变后增大,此因附加随机噪声控制系数G(n)在通道突变后迅速增大,以提供较大附加随机噪声用以次级通道再次在线辨识。由图5(d)看出,主动控制滤波器与次级通道在线辨识滤波器迭代更新的收敛步长对初级、次级通道变化跟踪性能较好。

图5 次级通道突变控制仿真结果(dB) Fig.5 Performance comparison of vibration paths sudden changed case
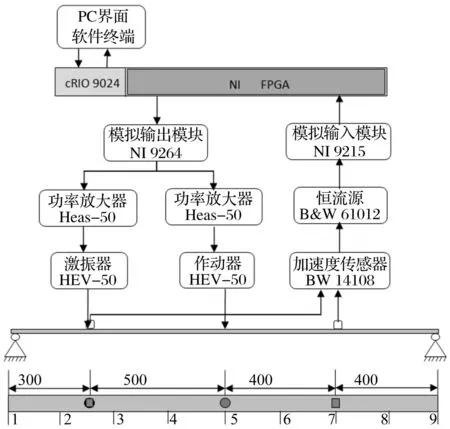
图6 简支梁振动主动控制实验简图(单位:mm) Fig.6 The physical diagram of active vibration control for simply supported beam
4结构响应主动控制实验
为对所提次级通道在线辨识技术效果进行验证,基于美国仪器公司可重新配置嵌入式控制盒采集系统(NI CompactRIO)进行简支梁振动主动控制实验。简支梁参数:长1600 mm,宽50 mm,厚10 mm,弹性模量E=200 GPa,泊松比λ=0.33。实验基本原理见图6。由信号发生模块生成参考信号,经功率放大器传给激振器激发简支梁初级振动,加速度传感器接收到误差信号后通过数据采集卡输入自适应控制器产生次级控制信号,经作动器作用于简支梁产生梁次级振动,与初级振动叠加抵消实现减振功能。误差信号采用B&W 14108加速度传感器,模拟输入模块四通道 NI 9215 采集卡,模拟输出模块为NI 9263 信号发生卡,功率放大器采用南京佛能科技HEAS-5 型号,作动器、初级振源采用南京航空航天大学振动所HEV-50型激振器。恒流源采用B﹠W Sensing Tech的61012 型号。将简支梁划分为8个单元、9个节点。激振器作用于2、3号节点之间,作动器作用于5号节点。参考传感器位于激振器作用点正上方用于测量参考信号,误差信号传感器置于7号节点,即待控制点。
通过9263模块发生50 Hz、幅值为2 的正弦信号作为干扰力源定频信号激发梁的初始振动;控制系统工作前测量带控制点振动响应;打开控制系统,各自适应滤波器阶数皆取64阶,初值为零,在控制程序中产生一零均值, 幅值为 0.2 V随机信号作为误差通道辨识输入。采样频率1 kHz。输出控制信号,通过作动器激发次级振动进行振动控制,测试并记录实验数据。
用两个实验方案验证所提算法的有效性:①采用与不采用附加随机噪声调整策略进行试验,对比观察误差传感器检测的残余振动量;②振动控制收敛稳定后改变初级振动信号频率,观察本文算法对初始振动频率变化的跟踪性能。图7为整个控制过程中待控制点误差传感器测量的加速度响应时间历程。0~2 s为未控状态加速度响应,主动控制器在2 s开始工作,待控制点振动响应被有效控制。未采用附加随机信号控制策略时控制后振动响应幅值下降80%,采用附加随机噪声控制策略后幅值下降 90%。实施主动控制后悬臂梁测点处加速度响应得到较好抑制。
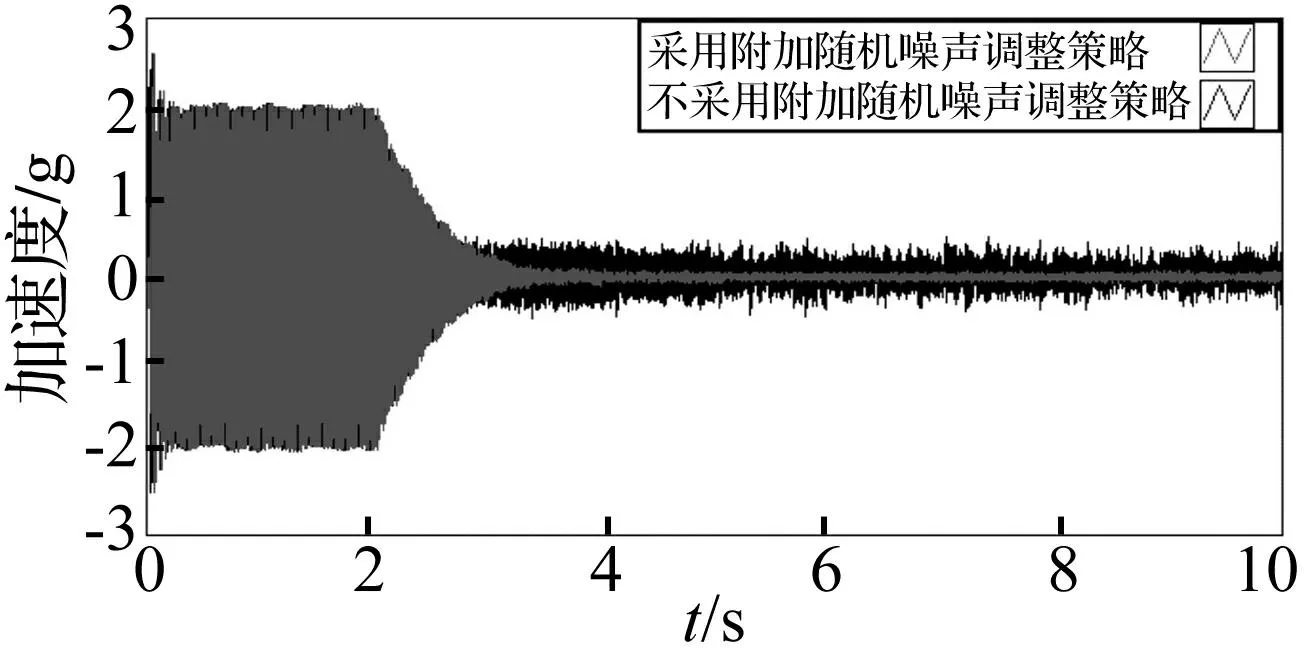
图7 实验方案一控制点加速度响应时间历程 Fig.7 Time history of AVC experiments for Case 1
图8为10 s时将初始振动频率由50 Hz变为55 Hz, 控制点误差传感器测量的加速度响应时间历程。由图8看出,频率变化后,采用本文算法振动抑制较快,对初始振动频率变化的跟踪性能较好。
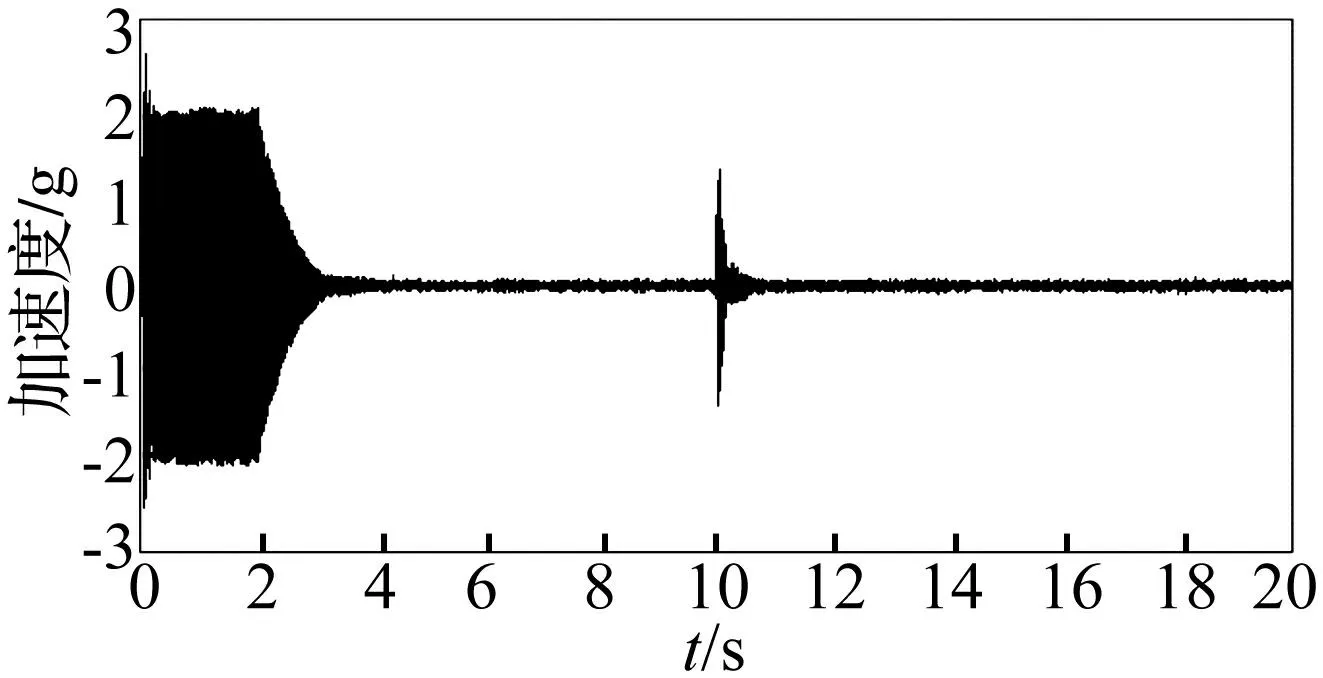
图8 实验方案二控制点加速度响应时间历程 Fig.8 Time history of AVC experiments for Case 2
5结论
(1)所提基于次级通道在线辨识的变步长振动主动控制算法与主动控制环节收敛步长及次级通路建模环节收敛步长的调整表达式,能提高算法的收敛性能,简化系统算法复杂度。
(2)所提新的附加噪声功率控制策略,可实现对附加随机噪声功率的调节,在保证系统稳定前提下能尽量消除对残余噪声影响。
(3)简支梁振动主动控制试验结果表明,在无需离线测得次级通道传递函数情况下,该控制系统对简支梁振动响应有较好的抑制作用,且对初级振动频率跟踪性能较好,表明基于次级通道在线辨识的主动控制方法行之有效。
参考文献
[1]Alkhatib R,Golnaraghi M F. Active structural vibration control: a review[J].Shock and Vibration Digest, 2003, 35(5): 367-383.
[2]朱晓锦,黄全振,高志远,等.多通道FULMS自适应前馈振动控制算法分析与验证[J]. 振动与冲击,2011,30(4): 198-204.
ZHU Xiao-jin, HUANG Quan-zhen, GAO Zhi-yuan, et al. Analysis and verification of multi-channel FULMS algorithm for adaptive feedforward active vibration control[J]. Journal of Vibration and Shock, 2011, 30(4): 198-204.晓锦,黄全振,高志远,等.多通道FULMS自适应前馈振动控制算法分析与验证[J]. 振动与冲击,2011,30(4): 198-204.
ZHU Xiao-jin, HUANG Quan-zhen, GAO Zhi-yuan, et al. Analysis and verification of multi-channel FULMS algorithm for adaptive feedforward active vibration control[J]. Journal of Vibration and Shock, 2011, 30(4): 198-204.
[3]Snyder S D, Hansen C H. The effect of transfer function estimation errors on the filtered-X LMS algorithms [J]. IEEE Trans. Signal Process,1994, 42(4): 950-953.
[4]Eriksson L J, Allie M C. Use of random noise for on-line transducer modeling in an adaptive active attenuation system [J]. Acoust. Soc. Am, 1989, 85(2): 797-802.
[5]Zhang M, Lan H, Ser W. A robust online secondary path modeling method with auxiliary noise power scheduling strategy and norm constraint manipulation [J]. IEEE Trans. Speech and Audio Processing, 2003, 11(1): 45-53.
[6]杨铁军,顾仲权,鲁明月,等. 基于误差通道在线辨识的结构振动主动控制系统[J].振动与冲击,2004, 23(3): 55-59.
YANG Tie-jun, GU Zhong-quan, LU Ming-yue, et al. Active control system for structural vibration with online secondary path identification [J]. Journal of Vibration and Shock, 2004, 23(3): 55-59.铁军,顾仲权,鲁明月,等. 基于误差通道在线辨识的结构振动主动控制系统[J].振动与冲击,2004, 23(3): 55-59.
YANG Tie-jun, GU Zhong-quan, LU Ming-yue, et al. Active control system for structural vibration with online secondary path identification [J]. Journal of Vibration and Shock, 2004, 23(3): 55-59.
[7]Akhtar M T, Abe M, Kawamata M. A new variable step size LMS algorithm-based method for improved online secondary path modeling in active noise control systems [J]. IEEE Transactions on Audio Speech and Language Processing, 2006,12: 720-726.
[8]Carini A, Malatini S. Optimal variable step-size nlms algorithms with auxiliary noise power scheduling for feedforward active noise control [J]. IEEE Transactions on Audio Speech and Language Processing, 2008,16(2): 1383-1395.
[9]浦玉学,张方. 多通道FURLS噪声主动控制算法及仿真[J].国外电子测量技术,2012, 31(6): 36-39.
PU Yu-xue, ZHANG Fang. Multi-channel FURLS algorithm for active noise control and simulation[J]. Foreign Electronic Measurement Technology, 2012, 31(6): 36-39.
[10]彭福军,马扣根,顾仲权.自适应前馈振动主动控制的参数选择与稳定性[J].振动工程学报,1997,10(2):549-555.
PENG Fu-jun, MA Kou-gen, GU Zhong-quan. Parameters selection and stability analysis of adaptive feedforward vibration control[J]. Journal of Vibration Engineering, 1997, 10(2):549-555.福军,马扣根,顾仲权.自适应前馈振动主动控制的参数选择与稳定性[J].振动工程学报,1997,10(2):549-555.
PENG Fu-jun, MA Kou-gen, GU Zhong-quan. Parameters selection and stability analysis of adaptive feedforward vibration control[J]. Journal of Vibration Engineering, 1997, 10(2):549-555.
[11]Davari P, Hassanpour H. Designing a new robust on-line secondary path modeling technique for feedforward active noise control systems [J]. Signal Process, 2009, 89: 1195-1204. R,Golnaraghi M F. Active structural vibration control: a review[J].Shock and Vibration Digest, 2003, 35(5): 367-383.
[2]朱晓锦,黄全振,高志远,等.多通道FULMS自适应前馈振动控制算法分析与验证[J]. 振动与冲击,2011,30(4): 198-204.
ZHU Xiao-jin, HUANG Quan-zhen, GAO Zhi-yuan, et al. Analysis and verification of multi-channel FULMS algorithm for adaptive feedforward active vibration control[J]. Journal of Vibration and Shock, 2011, 30(4): 198-204.晓锦,黄全振,高志远,等.多通道FULMS自适应前馈振动控制算法分析与验证[J]. 振动与冲击,2011,30(4): 198-204.
ZHU Xiao-jin, HUANG Quan-zhen, GAO Zhi-yuan, et al. Analysis and verification of multi-channel FULMS algorithm for adaptive feedforward active vibration control[J]. Journal of Vibration and Shock, 2011, 30(4): 198-204.
[3]Snyder S D, Hansen C H. The effect of transfer function estimation errors on the filtered-X LMS algorithms [J]. IEEE Trans. Signal Process,1994, 42(4): 950-953.
[4]Eriksson L J, Allie M C. Use of random noise for on-line transducer modeling in an adaptive active attenuation system [J]. Acoust. Soc. Am, 1989, 85(2): 797-802.
[5]Zhang M, Lan H, Ser W. A robust online secondary path modeling method with auxiliary noise power scheduling strategy and norm constraint manipulation [J]. IEEE Trans. Speech and Audio Processing, 2003, 11(1): 45-53.
[6]杨铁军,顾仲权,鲁明月,等. 基于误差通道在线辨识的结构振动主动控制系统[J].振动与冲击,2004, 23(3): 55-59.
YANG Tie-jun, GU Zhong-quan, LU Ming-yue, et al. Active control system for structural vibration with online secondary path identification [J]. Journal of Vibration and Shock, 2004, 23(3): 55-59.铁军,顾仲权,鲁明月,等. 基于误差通道在线辨识的结构振动主动控制系统[J].振动与冲击,2004, 23(3): 55-59.
YANG Tie-jun, GU Zhong-quan, LU Ming-yue, et al. Active control system for structural vibration with online secondary path identification [J]. Journal of Vibration and Shock, 2004, 23(3): 55-59.
[7]Akhtar M T, Abe M, Kawamata M. A new variable step size LMS algorithm-based method for improved online secondary path modeling in active noise control systems [J]. IEEE Transactions on Audio Speech and Language Processing, 2006,12: 720-726.
[8]Carini A, Malatini S. Optimal variable step-size nlms algorithms with auxiliary noise power scheduling for feedforward active noise control [J]. IEEE Transactions on Audio Speech and Language Processing, 2008,16(2): 1383-1395.
[9]浦玉学,张方. 多通道FURLS噪声主动控制算法及仿真[J].国外电子测量技术,2012, 31(6): 36-39.
PU Yu-xue, ZHANG Fang. Multi-channel FURLS algorithm for active noise control and simulation[J]. Foreign Electronic Measurement Technology, 2012, 31(6): 36-39.
[10]彭福军,马扣根,顾仲权.自适应前馈振动主动控制的参数选择与稳定性[J].振动工程学报,1997,10(2):549-555.
PENG Fu-jun, MA Kou-gen, GU Zhong-quan. Parameters selection and stability analysis of adaptive feedforward vibration control[J]. Journal of Vibration Engineering, 1997, 10(2):549-555.福军,马扣根,顾仲权.自适应前馈振动主动控制的参数选择与稳定性[J].振动工程学报,1997,10(2):549-555.
PENG Fu-jun, MA Kou-gen, GU Zhong-quan. Parameters selection and stability analysis of adaptive feedforward vibration control[J]. Journal of Vibration Engineering, 1997, 10(2):549-555.
[11]Davari P, Hassanpour H. Designing a new robust on-line secondary path modeling technique for feedforward active noise control systems [J]. Signal Process, 2009, 89: 1195-1204.

