基于STM32的电子罗盘设计
2015-12-28龚健颖刘忠富金健男王昊许斌
龚健颖 刘忠富 金健男 王昊 许斌
摘 要:目前,导航系统大多采用GPS导航,但GPS导航在偏远地带容易受到其他波段信号的干扰,有效信号不能完全返回到卫星中,因此稳定性较差。为了解决这一问题,文中设计了一种基于STM32F103RET6单片机的电子罗盘系统,该系统中的磁阻传感器采用HMC5883,从而有效解决了上述问题。该系统具有性能稳定、功耗低、精度高等优点,能够在高山、森林或者一些信号较差的地方得到很好的运用。
关键词:HMC5883;电子罗盘;STM32F103RET6单片机;MPU6050
中图分类号:TP39 文献标识码:A 文章编号:2095-1302(2015)12-000-02
0 引 言
GPS在导航定位、测速方面具有广泛的应用,但在高楼密集的城区和偏远地带,GPS信号受到阻挡, 信号精度降低,因而GPS设备不能很好的将信号回馈到卫星[1]。针对这一问题,可以采用电子罗盘和GPS组成导航定向,电子罗盘可以对GPS进行有效的补偿[2]。同时,随着科技的发展,电子罗盘也可以安装在汽车或者轮船上,当驶入到信号较差的地方时,数字电子罗盘可以起到很大的作用。
本文以HMC5883三轴数字罗盘传感器为基础,以STM32F103RET6单片机为微处理器,设计了一款数字电子罗盘。它功耗低,体积小,便于携带,而且精度高,在GPS信号差的地方,可以起到一定的导航作用。
1 系统框图
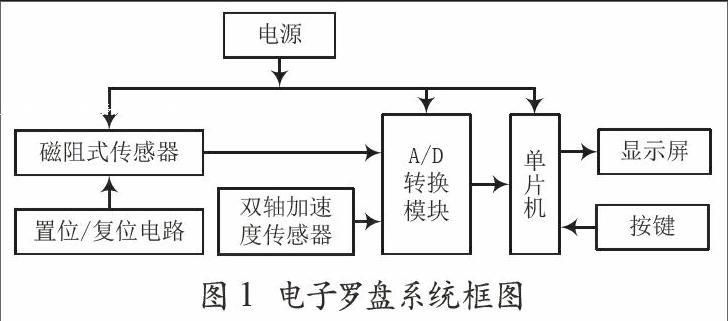
磁阻传感器HMC5883测量地球磁场矢量信息,加速度传感器MPU6050采集重力加速度分量,然后经过AD转换器模拟量转换为数字量,采用STM32F103RET6单片机来完成传感器数据采集,并进行传感器数据处理和误差校正,最终得到位置信息并通过LCD显示结果。系统框图如图1所示。
2 硬件电路设计
2.1 电源升压电路
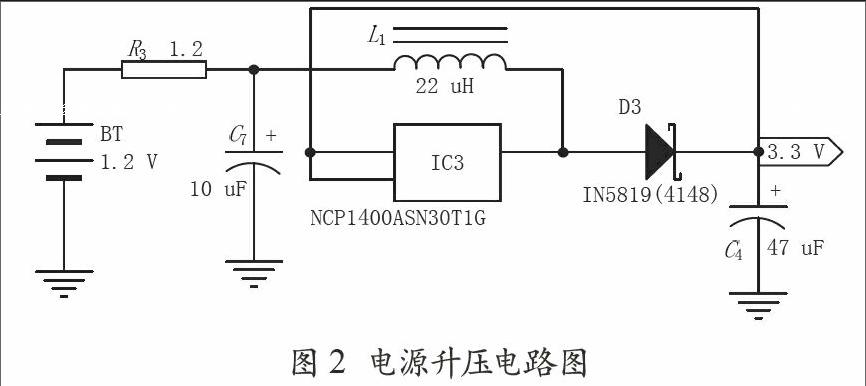
电源是电子罗盘系统正常工作的基础,电源的好坏直接影响电路工作的稳定性,STM32F103RET6单片机的工作电压都是3.3 V,而电子罗盘系统使用1.2 V锂电池供电。本系统采用NCP1400ASN30T1G升压芯片,把1.2 V电压提升到3.3 V,供给系统各部分作为电源。电源电路如图2所示。
2.2 HMC5883磁阻传感器电路设计
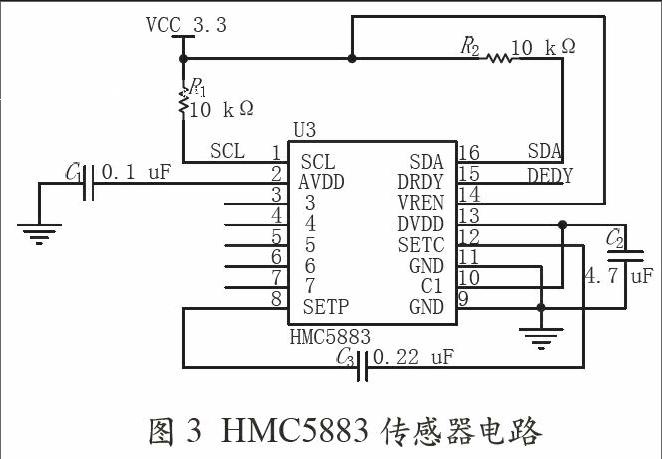
HMC5883磁阻传感器接口电路如图3所示。图3中HMC5883为数字接口双轴磁阻传感器,该传感器内置ASIC放大器,12位A/D转换器,I2C总线输出[3]。R1、R2为上拉电阻,DRDY为数据准备好中断控制口,接控制器中断输入口。电容C1、C2加上传感器片上ASIC电路中的H-电桥驱动电路可以产生电流脉冲,使片上的置位/复位电流带产生磁场给传感器去磁和极性翻转[4]。
2.3 加速度传感器接口电路
图4所示的加速度传感器采用MPU6050,该加速度传感器采用三轴陀螺仪技术,具有体积小、重量轻、结构简单、可靠性好等诸多优势[5]。该加速度传感器模块以MPU6050为核心芯片,其对陀螺仪和加速度计使用了三个16位的ADC模数转换,将采集到的模拟量转化为单片机可使用的数字量[6]。模块引出8个引脚,除了VCC和GND之外,其余6个引脚与单片机I/0口进行连接。其中,SCL为I2C时钟引脚,SDA为I2C数据引脚。
2.4 单片机最小系统电路图
主控电路采用STM32F103RET6单片机,其最小系统原理图如图5所示。图中所示的STM32F103RET6单片机具有较强的抗干扰能力,适合本系统设计[7]。晶振为8 MHz的无源晶振经单片机倍频后作为72 MHz的系统时钟,单片机为低电平复位,但当复位引脚为低电平后,单片机不会马上复位,还需要持续一段时间,故电容C13作为缓冲,从而维持一段时间的低电平[8]。BOOT0为启动模式选择引脚,当为低电平时为用户闪存启动模式,当为高电平时为系统内存启动模式,本电路默认设置为闪存启动模式,当需要设置为系统内存启动模式时可通过按键Dow1控制。
2.5 信号调理电路和AD转换模块
信号调理电路由AD7705芯片控制,AD7705串行接口可配置为三线接口[9]。增益值、信号极性及更新速率的选择可用串行输入口由软件来配置。该器件还包括自校准和系统校准选项,以消除器件本身或系统的增益和偏移误差,且耗电极低[10]。
3 系统软件设计
该系统采用模块化编写,便于调试,程序开始后,先读取预置数,系统各模块再初始化,选择是否为测量模式,如果是,然后读取各项数据;如果不是,则需要校准,校准时先读取磁场数据,然后计算偏移量,判断是否存在偏移量,如果有,则需要存入单片机中;若没有,则直接进入系统初始化。系统具体流程如图6所示。
4 结 语
电子罗盘系统采用数字磁阻传感器、双轴加速度传感器,处理器采用STM32F103RET6单片机,具有电路结构简单、集成度高、抗干扰能力强等优点。正常工作时耗电非常低,同时硬件成本低、功耗小,适合用于便携导航,也可用于其他需要测量倾角和方位角的场合。
参考文献
[1] 碗得福,马兴隆.磁性物理学[M].成都:电子科技大学出版社,1994.
[2] 陈伟韬.基于MEMS传感器的电子罗盘系统的设计[D].广州:广东工业大学,2013.
[3] 胡宁博,李剑,赵榉云.基于HMC5883的电子罗盘设计[J].传感器世界,2011(6):35-39.
[4] 郭检柟.基于磁阻芯片和 MSP430 单片机的电子罗盘设计[J].信息与电子工程,2010,8(1):12-15.
[5]熊剑,刘建业,孙永荣,等.数字磁罗盘的研制[J].传感器技术,2004,23(8):46-48.
[6] 蒋海涛,郭站营.基于 MEMS 加速度传感器的飞行器倾角测量系统设计[J] .计算机测量与控制,2010,18(1):107-109.
[7] 邰莉.三维磁阻式电子罗盘的设计与实现[D].哈尔滨:哈尔滨工程大学,2009.
[8] 彭军.传感器与检测技术[M].西安:西安电子科技大学出版社,2003.
[9] 刘武发,蒋蓁,龚振邦.基于磁阻和MEMS加速度传感器的电子罗盘设计及应用[J].兵工学报,2008,29(2):244-248.
[10] 刘宇,陈箫,李锦明,等.基于GPS/电子罗盘的测姿定位系统[J].计算机测量与控制,2011,19(10):2370-2372.
